李 野,关 娜
智能机器人是近年来机器人应用工程中一项前沿性的题目,本课题设计的垃圾搬运车是智能行走机器人的一种。垃圾搬运车就是针对上述情况,在参考了目前大多数智能小车的基础上,以降低成本为原则设计的。小车具备检测、巡迹、避障等功能。此垃圾搬运车具有性价比高、操作方便、可靠性好、功耗小等优点。
1 设计方案
垃圾搬运车分为十部分,分别是:1)主控制器装置;2)垃圾点检测模块;3)信号检测模块;4)障碍检测模块;5)车速测量模块;6)巡迹模块;7)车辆控制模块;8)卸载装置模块;9)人机接口模块;10)电源。
1.1 主控板
主控板主要用于对垃圾搬运车的控制,要求主控板小巧轻便,操作简单,易于写入和修改程序。选择51 系列单片机作为主控板,主要原因有以下几点:1.4k 字节FLASH 闪速存储器,128 字节内部RAM;2.拥有32 个I/O 口线,2 个16 位定时/计数器,一个5 向量两级中断结构,一个全双工串行通信口,片内振荡器及时钟电路;3.AT89C51 可以降至0Hz的静态逻辑操作,并支持两种可选的节电工作模式。
1.2 垃圾点检测模块
垃圾点检测设备采用红外线接收装置。当通过发射红外线并检测红外线有无被反射来确定前方是否存在站台,检测到垃圾点,则停车卸载;反之继续前行。这样提高了整体系统的智能性。
1.3 垃圾搬运车的电机驱动模块
选择L293D 作为垃圾搬运车的电机驱动芯片。实现垃圾搬运车左右轮的转动主要依靠单片机的I/O 接口,通过改变输入的控制端电平,由单片机驱动L293D,此时不需要外加隔离电路,就可以实现垃圾搬运车的左右轮的共同转动。接口p1.5 和p1.6 控制左边电机,接口p1.0 和p1.4 控制右边电机。取右边电机为例,当p1.0 输入数字电平“1”,p1.4 输入数字电平“0”时实现电机的正转;当p1.0 输入数字电平“0”,p1.4 输入数字电平“1”时实现电机的反转;当p1.0 输入数字电平“0(1)”,p1.4 输入数字电平“0(1)”时电机停止;然后由单片机共同作用,完成垃圾搬运车的左右轮共同转动。
1.4 避障检测模块
红外测距速度快,便宜,安全,容易制作。此模块要求具有一对红外信号发射与接收的二极管,要求发射管发射特定频率的红外信号,接收管能接收这种频率的红外信号。在范围内,当红外信号遇到障碍物时,红外信号会被反射,进而被接收管接收,因此可利用红外信号来识别周围环境的变化。由于是光检测距离,其反应速度比超声波传感器要快,红外测距速度快精度高。
1.5 底盘选择
选择金属底盘,金属地盘质量较塑料地盘厚重,价格较贵。但是稳定性能非常高,更加坚固。
1.6 巡迹模块
利用集成型红外对管作为寻迹单元的传感器,其中红外线发射管发射红外线,红外线二极管进行接收,采用红外线发射,外面可见光对接收信号的影响较小,再采用射极输出器对信号进行隔离。
红外传感器巡线的基本原理是利用物体的反射性质,目的是让小车巡黑线行驶,当红外线照射到黑线上时,此时红外线会被黑线吸收,反之照射到其他的颜色时,会有光反射到传感器的接收管。其中中间两路巡线是一直在黑线上,小车会直行,当任意一个出来,则小车会自动纠正,如果最外面的检测到黑线,则小车以更大速度纠正到正确黑线上面。红外巡迹模块原理如图1 所示。
1.7 车辆控制模块
垃圾搬运车采用STC89C52 作为该该车的主控制器。STC89C52 单片机的特点:1)超低功耗;2)具有运算速度快;3)抗干扰能力强;4)支持ISP在线编程;5)片内含8k 空问的可反复擦写1 000次的只读存储器;6)具有256 字节的随机存取数据存储器;7)32 个I/O 接口,3 个16 位可编程程序定时计数器;8)兼容性好,软件设计难度相对较低,价格低。
1.8 垃圾卸载装置
垃圾搬运车上安装一根管子并放上钢球,模拟垃圾,当收到信号时,运用舵机卸下指定的钢球(垃圾)。该装置可以随时调整卸下钢球的数量、结构简单,占用空间小。结构示意图如图2 所示。
1.9 人机接口
人机接口处采用机械弹性开关,当机械弹性开关闭合或者断开时,由于其本身的弹性作用,并不会立刻接通或断开,会伴有一连串的抖动。
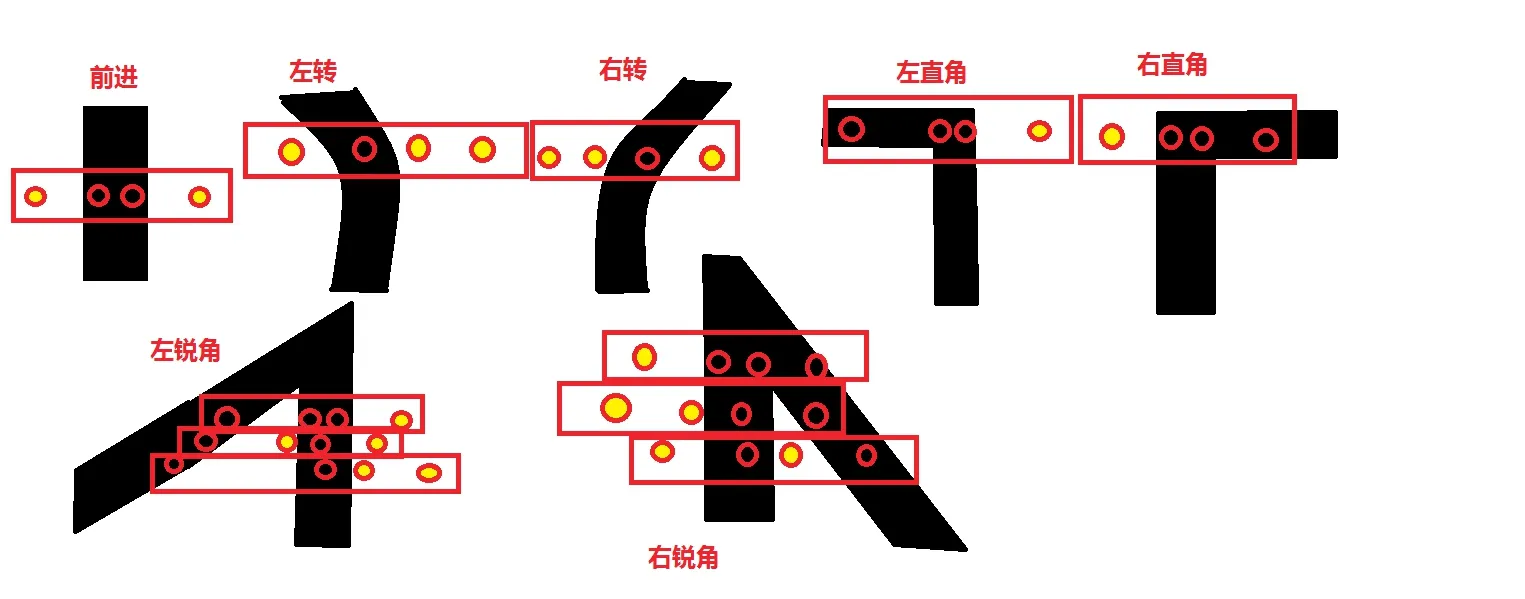
图1 红外巡迹模块原理示意图
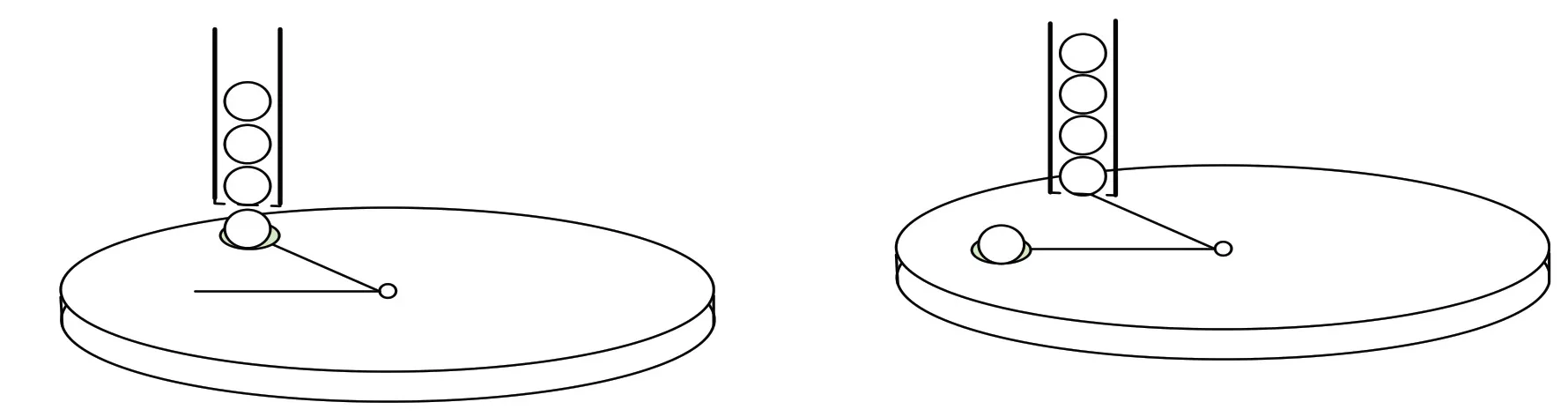
图2 垃圾卸载装置示意图
1.10 电源
能源选择关系到垃圾搬运小车的续航问题、动力问题,对于整个小车的制作至关重要。本设计采用目前应用最为广泛的电池——锂电池。优点是锂电池电压平台高,达到3.7V,便于组成电池电源组,消极的一方面是,锂离子电池很容易燃烧,因此,大多数锂离子电池都带有防短路的保护电路,还有防爆线。锂电池价格便宜,性能较高,锂电池使用寿命相对较长,使用寿命可达到6 年以上,绿色环保,对环境没有危害。并且具备高功率承受力。
2 结语
整个系统的设计以单片机为核心,利用了多种传感器,将软件和硬件相结合。能够实现垃圾搬运车的检测、巡迹、避障等功能。



