唐静媛1. 陈宇晴2.
湖南农业大学 理学院
基于无人驾驶共享车路径优化的讨论
唐静媛1. 陈宇晴2.
湖南农业大学 理学院
本文主要对美国5号,90号,405号州际公路以及520国道的车流量及道路情况进行分析,就无人共享车的使用,在路网导航方面的作用进行讨论。运用图论和Dijkstra算法从网络拓扑图中找到最短路径,以动态路径规划,计算权值,找到最优路径。得出无人共享车及时分享路况信息,可为用户提供规避交通堵塞和道路突发状况的,更加便捷合理的出行路径的结论。
无人驾驶共享车 图论 Dijkstra算法
一、研究背景
随着人们的生活水平不断提高,出行方式的多样化,使得道路交通面临一个又一个的挑战。为解决道路通行问题,无人共享车出现在了人们的视野中。其智能系统减少了制动时间和行车间距,也就间接地增大了道路通行能力。同时,无人共享车之间通过导航系统的信息传递,使得在路径的选择上更优化。
二、研究方法
最优路径的最优标准影响着路段权值的设置,故分别讨论最短路径最优标准(车辆从起点到终点岁行驶的道路的长度最短)及最小时间最优标准(车辆从起点到终点所行驶的时间最短)两种标准[1]。
(1)最短路程最优路径

(2)最短时间最优路径

其中Uij表示节点i和j节点之间的路段的权值,Lij表示道路上节点和节点之间的实际路程,Vij表示节点和节点之间车辆通行平均速度。允许通行表示节点和节点之间有实际的道路连接,禁止通行表示节点和节点之间无道路连接。
三、数据处理
选取了美国西雅图5号公路,90号公路,405号公路,520号公路的五个道路交汇点作为无向图的五个节点,如下图:
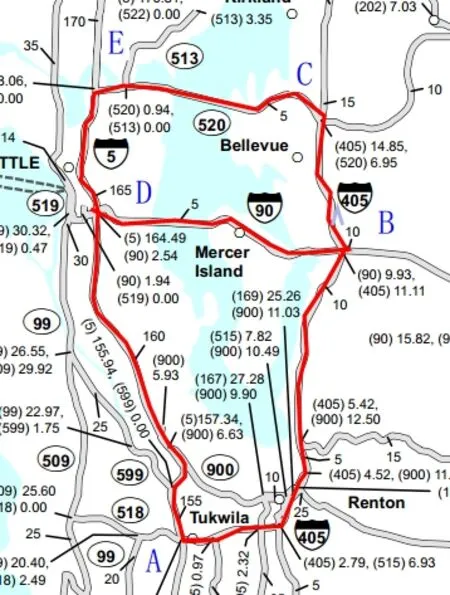
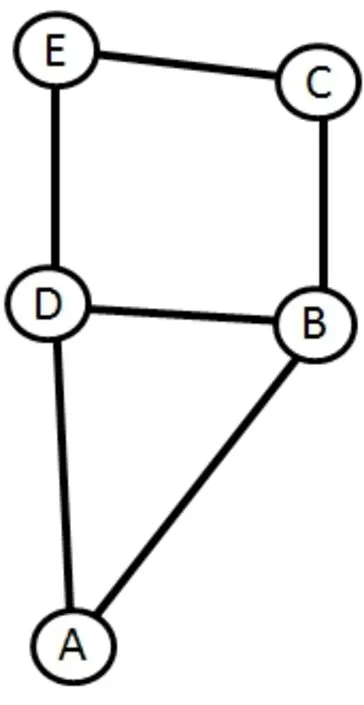
图1 节点图
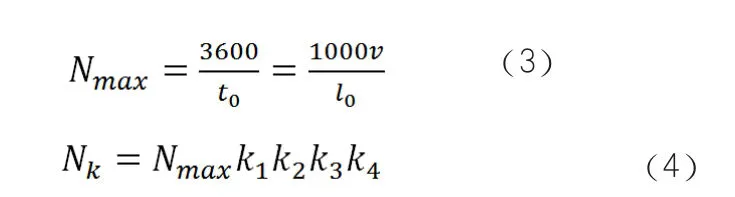
计算出当引入10%的无人驾驶车时,A-B路段,A-D路段,B-C路段,B-D路段,C-E路段,D-E路段的平均车流速度,从而得到平均时间。使用10%的无人驾驶车时,车流速度可以看做实际通行能力,实际通行能力的计算公式如下:
通过计算可以得到:

考虑到引进无人驾驶车时,无人驾驶车之间的最小安全间距会小于非无人驾驶车之间的最小安全距离,刹车时的反应时间也会降低,因此需要对公式进行修正,增加修正系数,得:

其中Nmax为道路最大交通量(即基本通行能力),Nk为道路可能通行能力,v为道路最高限速,t为制动反应时间,φ为路面摩擦系数,la为车辆间安全距离,lc为平均车身长度,k1、k2、k3、k4分别表示车道宽度修正系数、汽车类型修正系数、沿途条件修正系数以及车道数修正系数。
根据《美国公路通行能力手册》[2],取v=60mile/h≈96.56km/h,t=1.5s,φ=0.6,la=2.5m,lc=5m,假设修正系数∂=0.8,计算出各路段的平均通过时间见下表:

表1 平均通过时间
假设我们要从D点到C点,有D-B-C与D-E-C两条路径可供我们选择,在实际的车辆前进中,司机由于不知道路面的交通情况,通常会根据路程的长度来选择出行路劲,采用最短路程最优路径,运用Dijkstra's Algorithm计算出最优路径为D-E-C,最短路程为17.73,引入无人驾驶车后通过无人驾驶车与非无人驾驶车的交互导航作用可以知道当前路况,因此可以采用最少时间最优路径,运用Dijkstra's Algorithm计算出最优路径为D-B-C,最少时间为3。
四、结论
无人共享车的使用能使得路况信息得到及时的分享,可为用户提供规避交通堵塞和道路突发状况的,更加便捷合理的出行路径。因而,无人共享车的研究,是今后交通工具发展的方向,是解决道路交通问题的重要利器,是便利民生的绝佳机会。
[1]HongXiao, “The Research of Path Planning System Based on WANET and Real-time Traffic Information”, South China University of Technology, 2015.
[2]“Highway Capacity Manual”. Transportation Research Board , Washington,D.C.2001.ISBN 0-309-06681-6.
唐静媛(1997.4-),女,汉族,湖南衡阳人,湖南农业大学理学院,本科学历,研究方向:统计学;陈宇晴(1995.12-),女,汉族,福建莆田人,湖南农业大学理学院,本科学历,研究方向:统计学。



