田宏伟 徐云龙 沈晓峰
摘 要: 植保无人机平台测高技术有着广泛的需求,而调频连续波(FMCW)毫米波雷达设备在自动驾驶领域已经逐渐普及,因此,把FMCW毫米波雷达测高技术推广到植保无人机测高领域具有重要意义。基于植保无人机平台分析FMCW毫米波雷达测高原理和系统设计,证明了FMCW毫米波雷达可以用于植保无人机。提出基于地表建模的测高雷达回波仿真方法,可用于进行不同地形情况下的FMCW毫米波测高雷达性能分析和算法研究,实验分析了模拟回波的高度信息,证明该方法能满足植保无人机测高需求。
关键词: 植保无人机; 测高方法; 调频连续波; 毫米波雷达; 回波仿真; 地表建模
中图分类号: TN95?34; TP391.9 文献标识码: A 文章编号: 1004?373X(2020)05?0167?04
Principle analysis and simulation of height measurement
by plant protection UAV millimeter?wave radar
TIAN Hongwei, XU Yunlong, SHEN Xiaofeng
(Applied Technology College of Soochow University, Suzhou 215325, China)
Abstract: There is a wide demand for height measurement technology of plant protection unmanned aerial vehicle (UAV) platform. The frequency modulated continuous wave (FMCW) millimeter?wave radar equipment has been gradually popularized in the field of automatic pilot. Therefore, it is of great significance to extend the FMCW millimeter?wave radar height measurement technology to the field of plant protection UAV. The height measurement principle and system design of FMCW millimeter?wave radar is analyzed on the basis of plant protection UAV platform and it is proved that the FMCW millimeter?wave radar can be used for plant protection UAV. A height measurement radar echo simulation method based on surface modeling is proposed, which can be used for the performance analyze of FMCW millimeter?wave height measurement radar and algorithm research under different terrain conditions. The experiment analyzes the height information of the simulated echo and proves that the method can meet the needs of plant protection UAV.
Keywords: plant protection UAV; height measurement method; FMCW; millimeter?wave radar; echo simulation; surface modeling
0 引 言
在无人机上的应用之中,植保无人机的定高和避障具有广泛的需求前景,一直都是研究的热点。植保无人机作业时,为达到较好的喷洒效果,使农药更均匀地附着在农作物叶片的表面,应使无人机在农作物顶部保持稳定的高度[1]。传统的气压计高度表[2]在低空作业时误差较大,不适合低空飞行的无人机设备。基于激光技术[3]的高度表在稀疏的植被表面具有穿透作用,不适用于植保应用中的测高。其他一些光学测高技术则会受到环境光的制约,在雾霾、粉尘、光照不强等恶劣条件下基本无法工作。毫米波雷达可以全天时、全天候进行工作,而且毫米波雷达主动探测的方式可以适用于不同的场景和距离,因而成为实现植保无人机测高的重要技术手段。
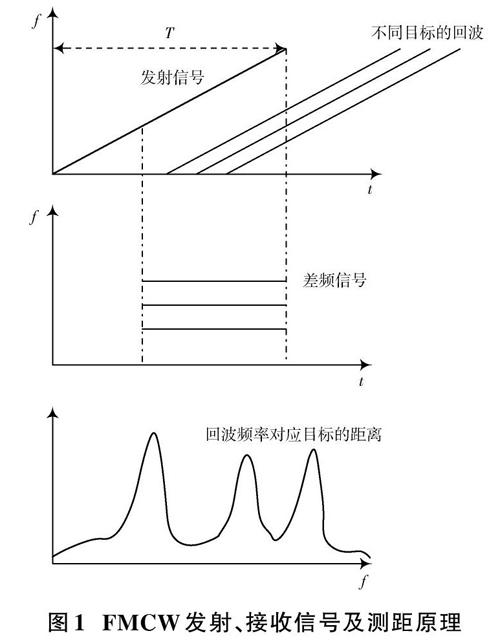
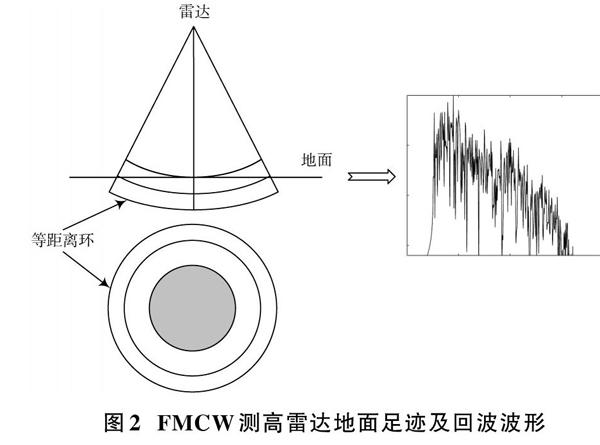
目前传感器网络、自动驾驶等方面的需求推动了毫米波技术的发展,基于调频连续波(Frequency Modulated Continuous Wave,FMCW)技术[4?6]的毫米波雷达芯片[7]及应用设备开始逐渐普及,在各个领域催生出许多新的应用技术。无人机与无人驾驶汽车不同的是其没有固定的车道,环境空间及目标结构复杂多变。譬如,在地形起伏的山地茶园、植被等地区,由于地形的变化会造成波形前沿的畸变甚至分裂,提高了测高技术的难度。因此,通过分析FMWC毫米波测高雷达回波波形与地形地貌之间的关系,建立准确的测高模型,可以提高植保无人机测高雷达的精度。
4 实验结果
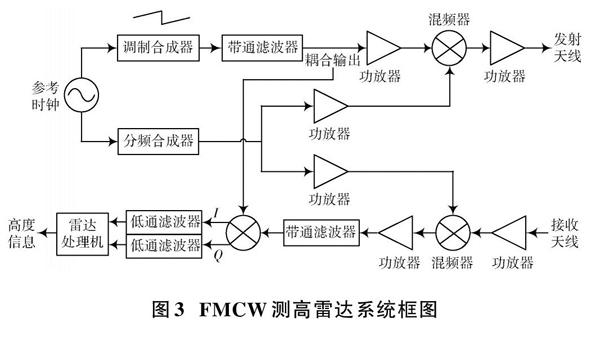
现有的大部分毫米波雷达产品频率主要分布在24 GHz和77 GHz,后者普遍应用于自动驾驶和车载传感,主要分为LRR(Long Range Radar)、MRR(Medium Range Radar)和SRR(Short Range Radar)产品,大致参数见表2。
使用MRR毫米波雷达参数作为测高雷达仿真参数,带宽设置为1 GHz,地面高程生成如图5a)所示,地面最大起伏高度不超过4 m。设计雷达高度为50 m,进行雷达回波的计算并进行100次非相参积累,得到的波形如图5b)所示。
移动毫米波雷达重复上述实验,分析得到波形数据,把回波前沿半功率点作为高度的估计值,测高的平均误差曲线如图6所示,可以看出,使用非相参积累的方法提高信噪比可以减小测量误差。实验数据显示,FMCW毫米波雷达测高误差在0.1 m内,满足植保无人机测高的需求。
5 结 论
本文基于植保无人机平台的测高应用,分析了FMCW毫米波雷达测高原理和系统设计,证明了FMCW毫米波雷达可以用于植保无人机。本文提出了基于地表建模的测高雷达回波仿真方法,可用于进行不同地形情况下的FMCW毫米波测高雷达性能分析和算法研究,实验分析了模拟回波的高度信息,证明了该方法能满足植保无人机测高需求。
参考文献
[1] 吴开华,孙学超,张竞成,等.基于高度融合的植保无人机仿地飞行方法研究[J].农业机械学报,2018,49(6):17?23.
[2] 王晓雷,闫双建,张吉涛,等.气压高度测量系统的设计与实现[J].自动化仪表,2017,38(8):59?63.
[3] 杨凡,杨贵军,李振海,等.低矮植被的无人机激光雷达测高精度分析[J].测绘科学,2017,42(9):151?157.
[4] 邱菁,黄继伟,陈阿辉,等.高精度调频连续波雷达测距算法的研究[J].微型机与应用,2017,36(9):22?24.
[5] 魏晓会,谢锡海.一种基于二分法和SDFT的FMCW雷达高精度测距方法[J].现代电子技术,2018,41(7):8?11.
[6] 陈天琪,杨浩,戴志伟.24 GHz FMCW车载测距雷达系统设计[J].电子技术应用,2016,42(12):37?40.
[7] 毕晓东.德州仪器毫米波传感器重塑雷达市场格局:TI汽车雷达产品营销总监Sudipto Bose和TI工业雷达产品营销总监Robert Ferguson谈毫米波雷达解决方案[J].电子技术应用,2017,43(7):1?2.
[8] CHOI J H, JANG J H, ROH J E. Design of an FMCW radar altimeter for wide?range and low measurement error [J]. IEEE transactions on instrumentation and measurement, 2015, 64(12): 3517?3525.
[9] 景国彬,张云骥,孙光才,等.一种三维地面场景SAR回波仿真的快速实现方法[J].西安电子科技大学学报(自然科学版),2017,44(3):1?7.
[10] 杨磊,常晓涛,郭金运,等.ENVISAT雷达高度计后向散射系数的极区海冰分布特性[J].测绘学报,2013,42(5):676?681.



