周发助,杨 杰,高 涛
(江西理工大学,江西 赣州 341000)
0 引 言
国内外磁悬浮列车测速定位技术方法有很多,如:交叉回线测速定位[1-3]、多普勒雷达测速定位[4-5]、微波测速定位[6-7]等。在国内,中低速磁悬浮列车多采用交叉回线测速定位法,但交叉回线测速定位法基于对回线产生的磁场进行列车位置辨识,悬浮系统、导向系统、推进系统的电磁场以及安装误差、列车运行振动等因素皆会影响到交叉感应回线测速定位系统的定位精度。
另一方面,目前的列车节能运行与智能控制技术需要功能完善的列车超速防护(ATP)[8]、列车自动驾驶(ATO)[9-10]和列车自动监控(ATS)[11]等系统。这些系统都需要以精确、高效、可靠的列车定位、测速技术为基础。没有精确的列车定位、测速技术,再先进的优化算法也难以达到预期效果。
1 无源信标定位磁码识别技术
针对磁悬浮列车实时定位与测速,本文给出一种磁极编码技术对行进磁悬浮列车进行定位和测速,提高列车定位和测速的精确度,实现列车运行状况的有效监测。该方法主要结构由磁极标识码和车载解码器组成;其信息识别特点就是将磁极标识码黏贴在轨道沿线,通过车载解码器进行相应扫描、解码、监测,实现预设目标,相比现有列车定位方法具有结构更加简单、成本低且精度高、易于安装维护等特点。
该列车定位技术沿用了轨道交通领域常见的一种轨旁无源信标定位技术[12]对磁悬浮列车进行测速定位,提高了列车测速定位精确度、监测效率,继而实现列车精确控制,如图1 所示。
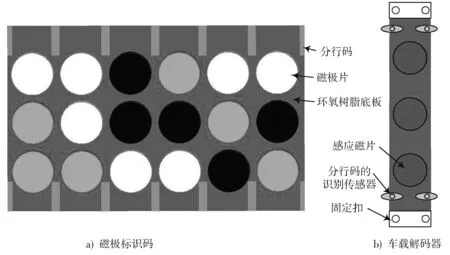
图1 磁极编码结构简图
1.1 绝对位置信息的隐藏
在磁极标识码中,该磁极标识码信息储存原理参考常见二维码编码方式[13-14],磁极‘S’‘N’及空位‘0’分别代表数值为‘2’‘1’‘0’进行一个三进制数据编码,在铁路沿线一定间距位置固定标识码,每一个检测位置代表不同的储存信息,然后将磁码识读器安装在磁悬浮列车上,由列车运行至相应检测位,识读其存储信息传输到列车控制系统中,继而实现对列车的定位与测速。只要合理地设置磁码间距即可保障磁浮列车测速定位的精准度。
具体而言,在磁浮列车信标定位技术中,其编码方式属于核心技术之一,应具有一定的磁码容错率,编码简单、识读速度快等特点。为此,该标识码的核心部分在于其编码层的信息编码方式以及标识码的识读策略。其信息编码技术采用永磁体的‘N’‘S’极性和无磁‘0’空位构成基本码元,按照预设矩阵编码方式进行信息编码储存。
另外,参考当下磁材料的生产工艺,选用钕铁硼N38 型永磁材料,其剩磁达1.18 T,矫顽力达860 kA/m,最大磁能积达300 kJ/m3,工作温度范围较大,且工业加工制作技术已经基本成熟,符合该标识码在磁浮列车定位应用的需求。
1.2 绝对位置信息的识别
首先,借助WAXWELL 软件在三维模型基础之上分析车载解码器与磁码之间的仿真静磁场的磁力曲线,如图2 所示。
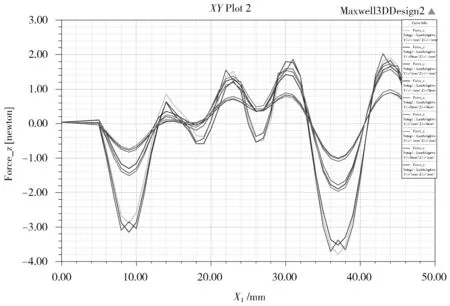
图2 感应磁力波形图
根据实际列车的运行状况,在仿真数据上分别模拟列车的上下和左右均为1 mm 的位置偏差,共计9 组数据说明磁码识别的可行性,磁极标识码的磁码取半径为2 mm 和车载解码器的识别码取半径为1.5 mm 的圆柱切片,保持每一组磁码的检测周期为7 mm,且暂不考虑扫描速度。
由图2 可知,当车载解码器的识别磁片与标识码上的磁码时刻完全重合,静态磁场力相对最大,且受力的方向与磁码的极性有关,这也就为标识码的解码提供了思路,值得注意的是当标识码的磁码位为空时,静态磁场力的大小并不是理论上的零。
在6 个检测周期中,每一个磁码检测位均受到不同相邻磁场的扰动(如较为明显的就是第一检测点最大约为-3 N 和第5 个检测点约为-3.8 N),且在同一检测位受车辆运行状态影响较大,如第5 监测点明显的“跳变”现象,即从-3.8~-1 N 之间的明显变化。
从实际工程应用层面考虑,车辆高速运行状态下,必然存在悬浮高度的瞬时变化和水平位置的调整,这也是磁码技术识别的难点之一。为此,本文提出引入磁码识别的分行处理和分段式阈值判断手段。
分行处理是通过外加检测手段对每一行的磁码进行同步分行处理,如图1 的分行码和分行码的识别传感器。
分段式阈值判断手段属于一种前端检测数据的处理方法。列车运行状态的不同直接影响磁场力的变化,因此,在前端的数据采集中,通过调取列车的运行状态(主要是位置状态)分别对应不同的阈值来限定相应位置的磁场力,即通过变化的阈值应对实时的磁场变化,特别是,针对无磁性的磁码位识别,为确保磁码检测精准度提供技术保障。
结合上述,在标识码的识别过程中,主要可包括两层面的信息识别:其一,就是由车载解码器上的识别码(永磁片)对磁极标识牌上的磁码信息的识别与读取,其二,就是通过对磁极编码牌的每行/列的磁码之间预设磁极行/列分隔符的识别。在两阶层的识别和读取中,第一阶层是磁码识别方法的最终目标,而第二阶层的识别与读取是保障第一阶层的准确识别和读取的关键。
具体而言,车载解码器主要采用竖排(垂直地面)与标识码磁码一一对应位置的受力传感器作为感应探头,当列车经过标识码时,由竖排感应探头按照单排矩阵列依次扫描,扫描过程中感应探头产生感应磁场力并由压力传感器实时监测,信号经过处理最终以电压的矩形波形式传输到控制系统进行磁码识别,还原原始磁码序列,并由车载数据库获取相应的位置信息、运行速度、加速度,如图3 所示,从而实现列车位置、速度、加速度的精确监测,为列车节能运行与智能控制提供了技术基础。在工程设计中,车载解码器的感应磁片尺寸应小于标识码的磁码尺寸。
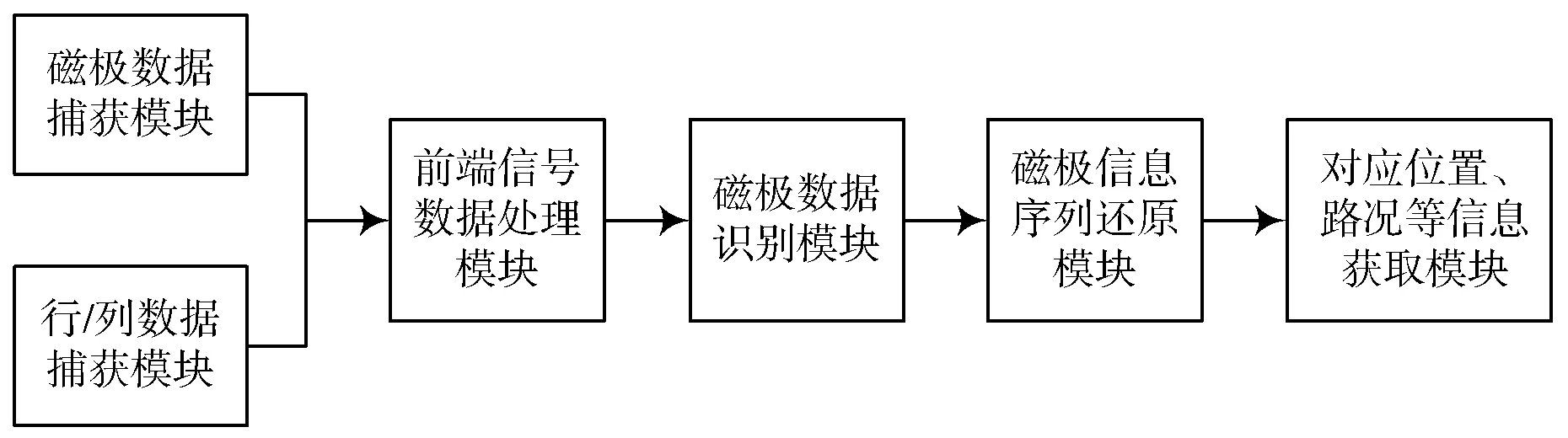
图3 磁码识别流程图
2 技术实现
在第1 节的理论分析和仿真验证的基础之上,本文进一步进行了硬件结构层面的实现。在识别电路中,主要采用压力传感器实现对前端数据的采集,STM32 对数据进行处理,最终由端口电压的输出进行判别,如图4所示。
在基本电路中,控制单元的PA11、PA12、PA13 作为检测输入I/O 口,其中PA11 口为红外检测输入,由于硬件设计避免了PA12 和PA13 口不可能同时出现高电平,当红外检测到黑色区域时进入磁码检测区,PA11 为低电平时,检测信息无效;PA12 与PA13 分别与压力传感器1、2 连接,当检测到斥力时PA12 为高电平,当检测到吸力时PA13 为高电平,两个传感器不能同时检测到压力,当PA12 为高电平时磁码为1,PA8 输出为高电平;当检测到PA13 为高电平时磁码为2,PA9 输出高电平;当进入磁码检测区时,两个传感器都没有检测到压力,则磁码为0。
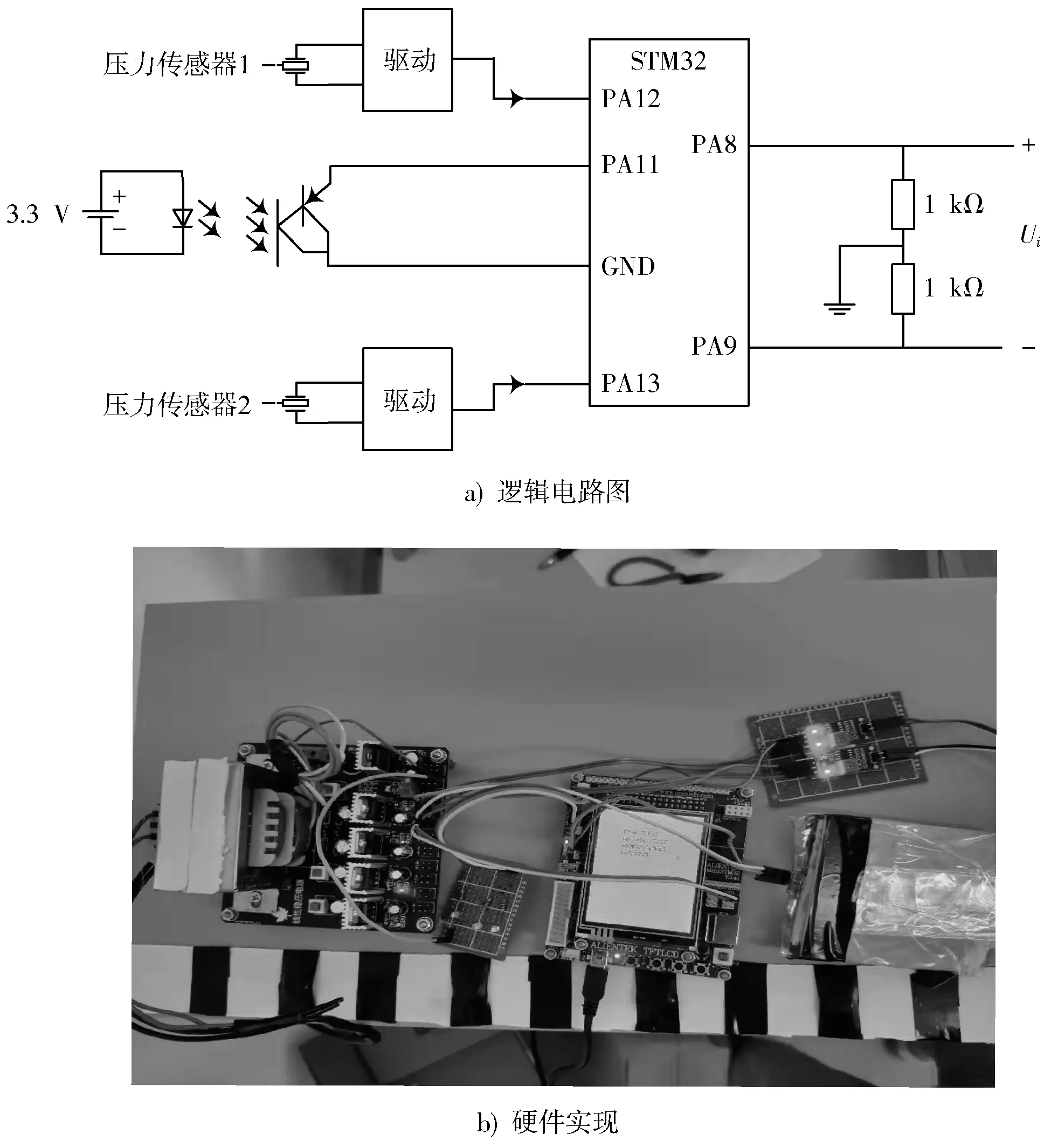
图4 基本逻辑电路图和硬件实现
在硬件结构中,本文对信息序列12012 进行验证,如图5 所示。
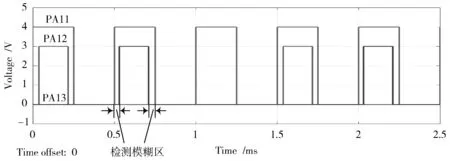
图5 示波器下的样本曲线
在图5 中,存在分行符比磁码较宽的原因导致检测结果中出现识别“模糊区”。考虑到在检测模糊区中容易出现识别失准现象,本文在识别方案中选择软件处理,在同一个检测区内如果检测到PA12 出现高电平和低电平,则识别PA12 为高电平;在同一个检测区内如果检测到PA13 出现高电平和低电平,则识别PA13 为高电平;同一个检测区内如果检测到PA12 和PA13 全为低电平,则识别码为“0”。
3 结 语
本文依照磁悬浮列车的信标定位测速技术提出了一种采用永磁体磁极编码的磁码定位策略。磁极标识码主要涉及计算机磁条识别、组合编码原理及快速解码识别等技术的一种磁码定位标识方法及编码识读方法。采用磁极作为编码元使得该技术可在黑暗环境和表面被遮盖情况下正常使用,且具有一定的防磨损功能,实现在复杂运行环境下对磁浮列车精准地确定位置及速度信息精确控制。
从列车的安全性考虑,本方法可结合相应的交叉感应回线进行双设备测速定位,为列车提供全方位的安全保障。
注:本文通讯作者为杨杰。



