侯泊江,龚 麟,杜 娟,贾彩娟
(西北工业大学第三六五研究所,陕西 西安 710065)
0 引 言
随着近十几年科技的蓬勃发展,不论在军事领域还是在各民用行业中,无人机都有十分广泛的应用[1]。目前,投入实际应用的无人机产品具有越来越高的可靠性,但在研发阶段,飞行试验的风险依旧是制约无人机产品的成本进一步降低的重要因素。无人机飞行试验的高风险主要包括两方面的因素:一是无人机是一个复杂的系统,其中包括众多分系统、部件和元器件,每一个环节出现问题都可能造成严重的后果;二是地面测试难以模拟空中飞行的动态过程和环境因素,这使得地面测试工作难以覆盖无人机飞行的整个工况。因此,半实物仿真系统在无人机的研发过程中发挥着重要的作用。半实物仿真系统是一种硬件在环的仿真系统[2]。针对无人机,半实物仿真系统通过实时仿真模型的解算使得无人机可以在实验室环境内“飞起来”,从而验证无人机动态性能、控制策略和逻辑、控制律算法,以及相关硬件、软件的技术状态,从而降低飞行试验的风险和无人机可能的损毁所造成的成本。半实物仿真系统在无人机的研发阶段已经有了广泛的应用,针对旋翼无人机[3]、固定翼无人机[4-6]、无人直升机[7]等都有相关的研究和工程实践案例。
随着多无人机编队飞行、协同任务成为无人机研究领域的热点方向[8-10],多架无人机同时进行飞行将会带来更高的试验风险。因此,多机编队飞行的半实物仿真系统在研发阶段将发挥更重要的作用。
本文针对多无人机编队飞行和协同控制等方面的飞行试验需求,设计并开发了一套半实物仿真系统。该系统可支持8架无人机进行编队飞行的半实物仿真试验,不仅可以进行设计阶段的仿真试验验证与测试,还能进行飞行试验前的仿真推演与地面操作手的模拟训练。
1 仿真系统总体架构
1.1 被试无人机
本文中的半实物仿真系统针对如图1所示的无人机而设计。该无人机共有2个操纵舵面,对称分布在后翼上,同向偏转时操纵无人机的俯仰姿态,差动偏转时操纵无人机的滚转姿态。因此,将这两个舵面记为左、右升降副翼。该无人机的机翼可向机身处折叠,常用筒式发射并执行多机协同任务。
1.2 仿真系统架构
本文设计的半实物仿真系统要求最多同时支持8架被试无人机的编队仿真,图2描述了多机编队半实物仿真试验的基本架构。参加半实物仿真试验的硬件实物有地面站(含数据链地面终端)、无人机(包括飞行控制计算机、任务计算机、舵机、数据链机载终端、机载电池等)以及仿真计算机。无人机与仿真计算机通过仿真电缆相连接,无人机与地面站通过无线电数据链路进行通信。另外,该无人机系统的数据链支持机间通信功能,用以满足编队飞行控制的需求。图3描述了多机编队半实物仿真试验的原理。首先,通过地面站装订机场地面高度、飞行航线等信息,该信息经由无线电数据链路下发至各参加仿真试验的无人机。随后,启动仿真计算机系统,无人机模型开始实时解算。最后,通过仿真计算机向各无人机模型发送炮射起飞指令,各无人机完成起飞过程,整个半实物仿真试验开始。仿真试验的原理以及半实物闭环仿真一个时拍下的信号流为:
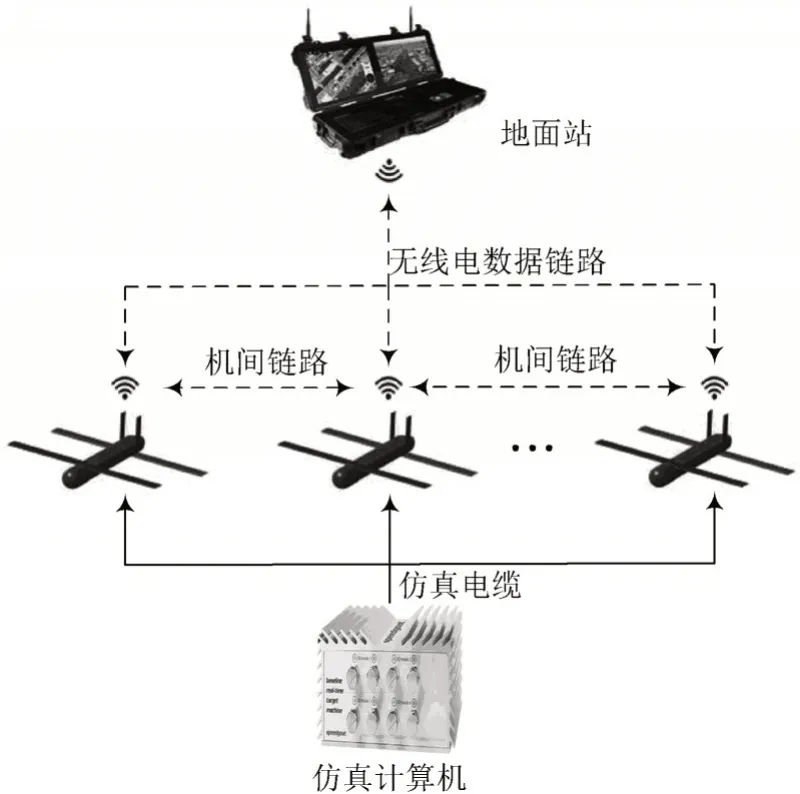
图2 多机编队半实物仿真架构示意图
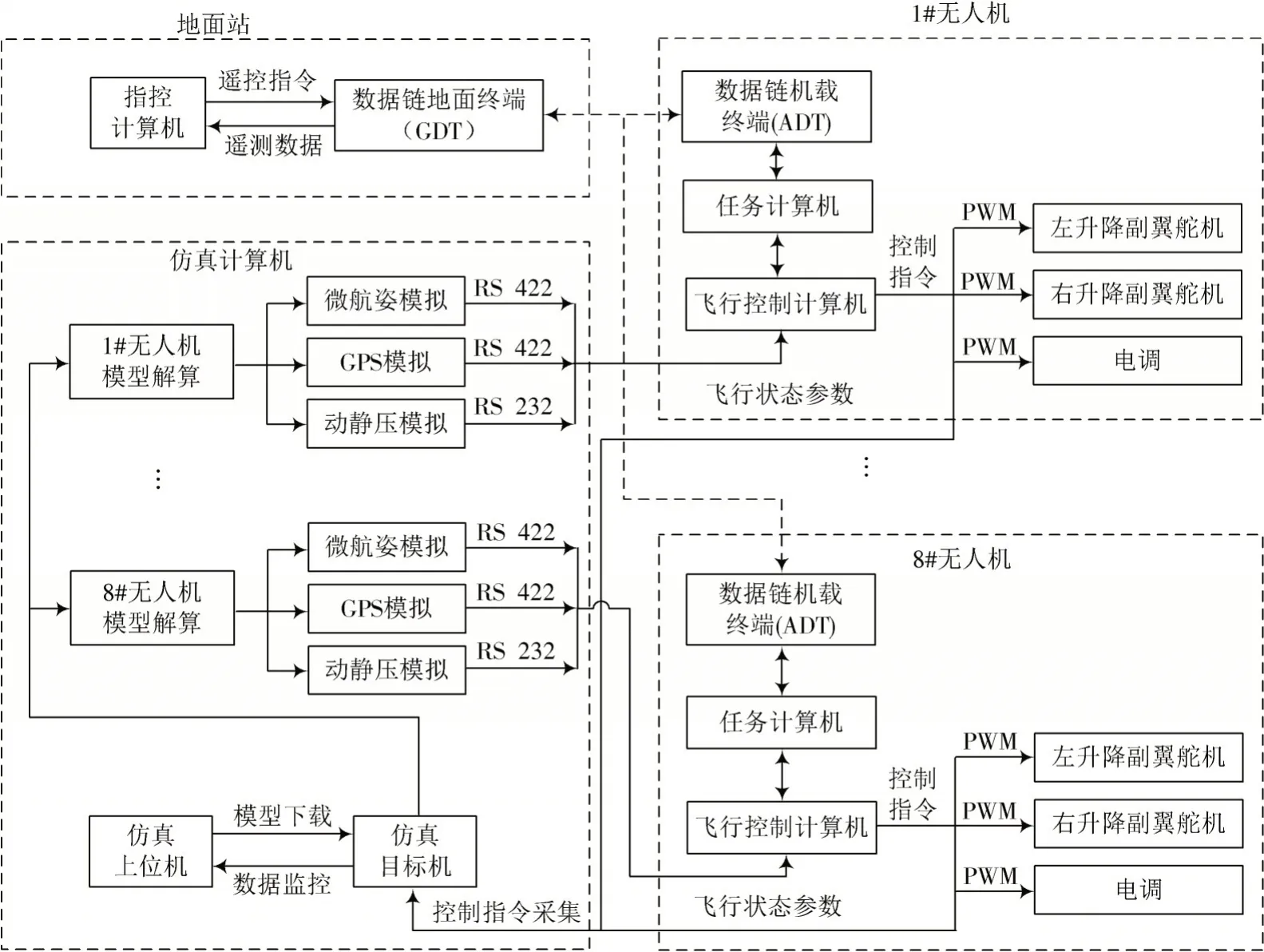
图3 多机编队半实物仿真原理图
1)任务计算机根据地面站下发的指令确定当前是否处于编队模式。若非编队模式,任务计算机向飞行控制计算机发送已装订的航线信息;若为编队模式,任务计算机向飞行控制计算机发送编队集结或队形保持所需的高度、速度以及航迹方位角指令。
2)飞行控制计算机收到任务计算机发来的指令后,根据飞行控制律解算出舵机和电调等执行机构的控制量,并将控制指令发送给舵机和电调。
3)仿真计算机通过仿真电缆采集舵机和电调的控制指令,并根据该指令解算无人机模型,得到无人机的姿态、速度、位置等飞行状态。
4)仿真计算机根据无人机当前的飞行状态,模拟各机载传感器的通信报文,发送给飞行控制计算机,从而实现各传感器的模拟。
5)飞行控制计算机接收到由仿真计算机模拟的各飞行状态信号后,再结合任务计算机当前下发的航路信息或编队控制指令,继续由飞行控制律计算得到下一个时拍的舵机、电调的控制指令,发送给舵机和电调。由此,半实物仿真进入了下一个时拍的循环。
2 硬件设计
2.1 上位机
半实物仿真系统采用上位机/目标机的基本架构。上位机运行Matlab Simulink软件,实现无人机半实物仿真模型的构建、编辑、调试与下载及仿真数据实时显示等功能。上位机选用1台高性能笔记本电脑,配置Intel i7处理器,主频3.0 GHz,内存16 GB,运行Windows 10操作系统。
2.2 实时目标机
实时目标机是半实物仿真系统的核心部件,主要完成两部分的功能:一是对无人机动力/运动学模型进行实时的解算,得到无人机的飞行参数;二是通过其配置的板卡与无人机飞控系统进行通信,实现硬件的闭环。本系统的实时目标机选用瑞士Speedgoat公司的Baseline realtime target machine[11],配 置Intel 4核 处 理 器,主 频2.0 GHz,内存4 GB。仿真目标机示意图如图4所示。

图4 仿真目标机示意图
此外,根据被试无人机的接口情况,目标机配置了对应的板卡:
1)串口卡。配置2块IO504串口卡,共16路串口。每路串口可以根据需求配置为RS 232或RS 422。仿真目标机通过串口通道与飞控系统通信,用以模拟微航姿组件、GPS以及动静压传感器。
2)PWM信号卡。配置2块IO397 FPGA板卡,通过软件配置使其具备28路PMW信号采集功能,对舵机、电调等执行机构的控制指令进行采集。
2.3 仿真电缆
如图5所示,仿真电缆将仿真目标机的对应板卡与飞行控制计算机相连接。通过三通设计思想,仿真电缆同时也和机载整机电缆相连接。无人机原有的机载电缆连接关系是:飞行控制计算机端连接器XS1、XS2与整机电缆的XS1、XS2端对接。仿真试验时将其二者断开,分别接于仿真电缆的对应连接器上。这样的设计有两个优点:一是除了能够引入仿真目标机对应的信号外,还能够保留不被仿真机模拟的机载设备原有的电器连接通道;二是不需要更改原有的机载电缆,即插即用,使用方便。
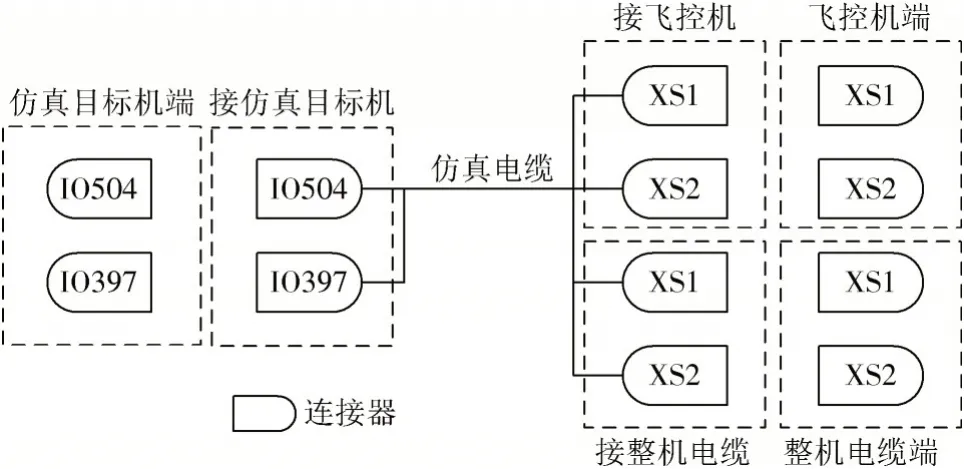
图5 仿真电缆链接示意图
3 软件设计
实时仿真环境采用Matlab 2019b版本的Simulink Real-time实时系统[12]。上位机运行Matlab Simulink,用以编辑、编译和下载无人机模型。仿真目标及运行于Simulink Real-time实时系统,并在该系统下完成仿真模型的实时解算。图6为本系统开发的上位机人机交互界面。在该界面下,可以分别控制8架无人机完成炮射起飞,并实时监控无人机的相关飞行参数,如姿态角、速度、位置等信息。图7为本系统开发的无人机实时仿真模型。其中,“Cmd_Recieve”模块为指令采集模型,通过IO397 PWM模块,实现舵机和电调指令的采集。“State_Send”模块为传感器模拟模块,该模块将8架无人机的飞行状态参数按照对应传感器的通信协议进行编码,然后通过IO504串口模块发送给飞行控制计算机,实现机载传感器的模拟。
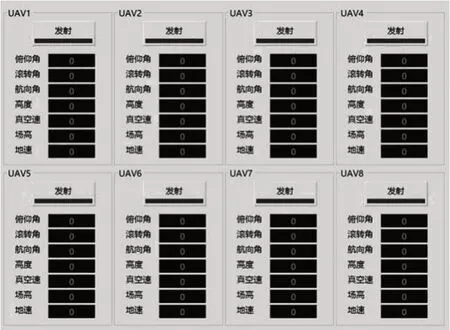
图6 上位机人机交互界面
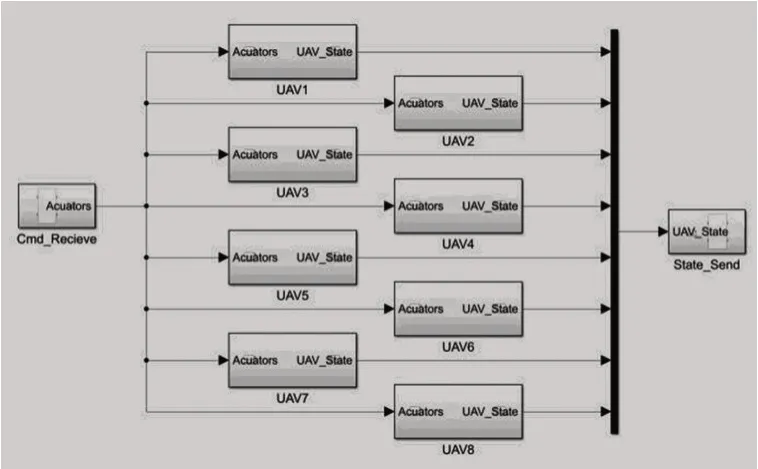
图7 无人机仿真模型框图
“UAV1”~“UAV8”模块为无人机的动力/运动学模块。该模块首先计算无人机因气动力、发动机推力和自身重力所受到的力和力矩,再由六自由度方程解算出无人机的飞行状态。无人机的六自由度方程由动力学方程和运动学方程组成[13]。
动力学方程为:
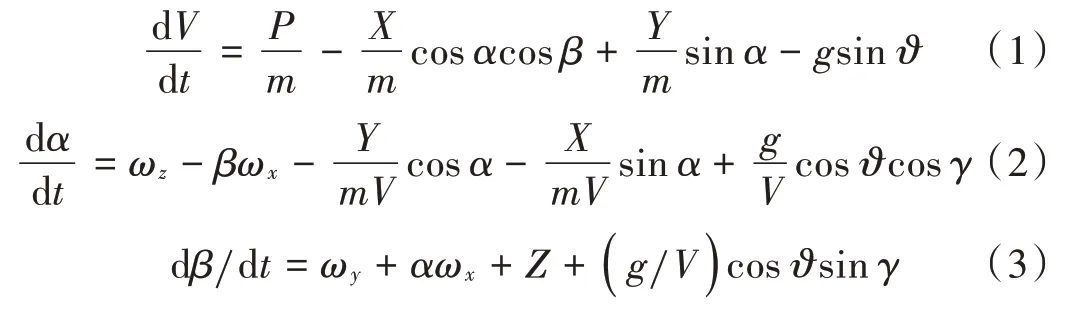
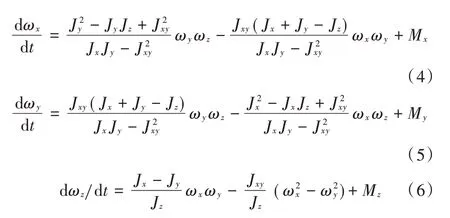
式中:V,α,β分别为飞机飞行速度、迎角、侧滑角;ωx,ωy,ωz分别为滚转角速度、偏航角速度、俯仰角速度;P为发动机推力;m为飞机质量;ϑ,γ分别为俯仰角、滚转角;g为重力加速度;Jx,Jy,Jz,Jxy分别为机体绕三轴转动惯量和惯性积。
运动学方程为:

式中:L,h,z分别为航程、飞行高度、侧向偏距。
4 仿真试验案例
根据某飞行试验科目的要求,在开展飞行试验前,利用本文设计的仿真系统进行8架无人机编队飞行的半实物仿真试验,从而对整个系统的硬件、软件状态进行测试验证,并对编队控制的功能和性能进行摸底。
试验开始前,首先通过地面站向8架无人机分别装订不同的航线,并设置1号机为长机。通过仿真系统上位机软件依次发射8架无人机起飞,仿真试验正式开始。8架无人机在起飞并爬升至安全高度后,自动沿各自的航线飞行。此时,在地面站设置编队队形并发送编队指令,除长机外,其余7架无人机放弃各自的航线,向长机附近集结,并最终保持给定的队形,完成编队飞行。地面站还可以发送不同的队形指令,8架无人机按照给定的队形进行变换,最终形成新的队形。如图8~图10所示,在仿真试验过程中,分别发送3种不同的队形指令,8架无人机的动作响应正常,编队控制算法正确,能够按照给定的队形保持编队飞行。仿真试验结束后,通过地面站记录的试验数据,可以分析编队飞行过程中各无人机之间的位置关系是否满足要求。图11、图12分别给出了在队形一保持相对稳定的情况下,1号机与2号机、3号机与4号机之间的距离。由数据可知,两组距离都在4.2 m左右,波动范围小于0.4 m,满足队形保持的要求。

图8 8机编队队形一

图10 8机编队队形三
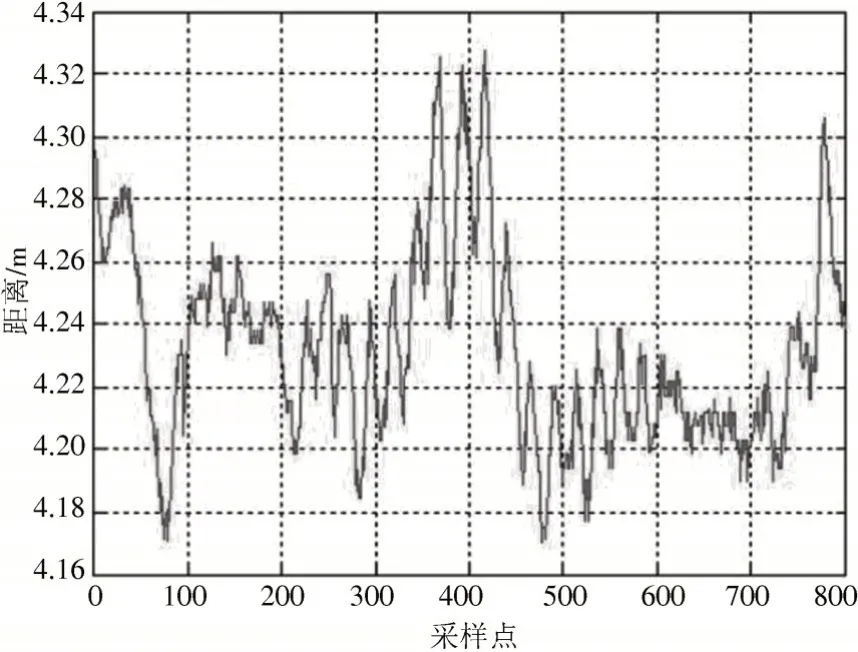
图12 队形一下3号机与4号机之间的距离

图9 8机编队队形二
5 结 语
针对多无人机编队飞行试验的需求,开发了一种考虑多机编队的半实物仿真系统,设计了仿真系统的整体架构,并给出了硬件、软件的解决方案。结合飞行试验需求,开展了8架无人机编队飞行的半实物仿真试验。从仿真试验的结果可以看出,该仿真系统功能正确,使用简易,能有效帮助设计人员验证多机编队飞行的功能和编队控制算法的性能。另外,通过仿真试验,地面操作手不仅熟悉了编队飞行的操作流程,还能提前明确无人机队形变换的动态过程,有效地发挥了仿真系统在模拟训练方面的作用。



