胡小勇, 张建军, 杨云晖, 邓志刚
(1.新余市公路事业发展中心, 江西 新余 338099;2.北京交通大学 综合交通运输大数据应用技术交通运输行业重点实验室, 北京 100044;3.新余公路勘察设计院, 江西 新余 338099)
0 引 言
在目前的交通系统中,关于模型预测的研究逐渐增多。主要方法是根据每个取样点的测量值和流量的计算模式,对预测时间域内的系统进行最优解求解,并在满足限制条件和性能指标的前提下,利用新测量到的系统参数求得最优解[1-2]。
为使模型预测控制的优越性得到最大程度的发挥,通常要求获取更为准确的系统资料,采用基于系统工作特性的数学模式进行预报;同时采用滚动优化、回馈修正等方法对外界扰动和模式不匹配造成的影响进行有效的修正,这是因为目前的时刻系统所预测的时域范围是有限的[3-4]。模型预测控制方法在实际的交通控制中普遍使用。对于城市道路交叉口,根据城市交通自身的特点,采用基于模型的预测方法可以达到良好的控制目的。但在实际应用中,交通流预测模型仍然有着较大的改进余地[5]。不同于快速路、高速公路,城市路网交通流在交叉口信号控制的影响下呈现出不同的状态。L.C.Zammit 等专门针对城市路网交通流系统运行情况展开深入的研究,辨识交叉口多种交通参数,包括自由流速、饱和流量、转向比等,利用在线对偶估计以及期望最大化算法展开验证分析,得出交通流模型辨识结果与方案运行结果一致,运行状态处于交叉口处三、四相位配[6]。E.Thonhofer 等则是对运行过程中城市路网交通流系统的变化特性展开深入研究,将随机变化项引入构建的宏观交通流模型框架当中,在离散化查找表创建时选用Monte Carlo 方法,将计算工作量降低,随机变量的处理效率在宏观基本图中更快[7]。H.Y.Sutarto 等提出一种随机混合模型,在切换控制交叉口交通流的模式时,采用马尔科夫链动态演示城市路网交通流,流量变化可通过参数值的改变而精准模拟,仅需调整流量模式即可[8]。一阶自回归为该模型随机过程的主要思想,AR 模型参数估计则选用EM 算法,该方法有利于准确度的提高,同时还能实现模式的切换。
为提高城市路网设计效率,文中提出一种基于非线性模型预测控制的城市路网交通流优化方案。采用预测控制方法,利用模拟试验验证所提出的算法在道路网络中的应用有效性,并验证迭代式识别在车辆流量模型的参数识别中的正确性。
1 交通信号预测控制研究
1.1 控制目标
从速度、密度和流量的守恒性中可以得出,在道路系统流量饱和的条件下,道路网络的车辆通过与道路网络的总体分布密切相关,路口的交通流量不足会导致道路拥挤[9]。若能设计出合适的相位分时规划,将现有的车流尽量分散,并将每个路口的入口车道数量保持相近,就可以极大地改善道路的运载容量,从而有效地解决道路交通拥挤问题,使每个路口的通行能力都能被最大限度的发挥,从而最大限度地提高路口的通行能力。
非线性宏观交通流模型[10]公式如下:
式中:x(k)、y(k)、u(k)分别为状态向量、输出向量及控制向量;d(k)为状态扰动向量;θ(k)为参数集合;ε(k)为输出的测量噪声;状态矩阵A和传递矩阵B为常系数矩阵。
输入通道i(i=1,2,3,4)的列车号作为输入基准,可以确定路口I0的全部入口车道i的列车号差异作为系统的输出向量:
式中CI0为排队差值输出函数。
路网交叉口排队车辆差值公式如下:
式中:y(k)为在第k次抽样时间内,各个路口入口的排队车流数量向量;C为路网各进口道排队差值的输出矩阵。
1.2 控制方案
为进一步验证本文方法的正确性,在太原市地区道路网络中,分别使用固定配时策略、模型预测控制策略、时变参数模型预测控制策略三种不同的交通信号控制方法。
1) 固定配时策略
本文所提出的固定时间分配方法是针对所调查地区道路交通的实际阶段。通过VISSIM 仿真,可以最大限度地模拟太原市地区道路网络中各个路口的实时数据,从而最大限度地模拟出道路上的车流量,更好地反映出该路段的实时路况[11]。
2) 模型预测控制策略
通过对城市道路系统中的非线性宏观交通流量和排队车差进行分析,得出以下公式:
式中F(·)是非线性函数。定义模型预测控制时域为Np,则有:
在此基础上,用符号“^”来替代预测的最优目标函数:
Φ(u(k))= 0(信号周期恒定)
3) 时变参数模型预测控制策略
将基于自适应迭代识别算法所获得的道路流量模型的参数引入道路网络的状况方程,并将其余的控制方法设定为模型预测控制策略[12]。
2 仿真研究
2.1 仿真实验参数
通过比较模拟试验,探讨模型对模型的预测控制算法所起到的作用。本论文所涉及的地区道路网络包括12 个路口、25 条单向交通通道,每条道路大约有3.5 m的宽度。实验以1:00—16:00 共15 h 的每日交通流量为样本,取样时间为5 min,根据实际时段内每15 min 的平均流量指标设定地区道路4 h 模拟车辆的流量。通过VISSIM 的节点评估和网络绩效评估等方法对道路网络的综合影响进行了研究,并通过Matlab 交通模拟系统对道路的综合影响进行了分析。图1 所示为道路4 h 的交通流。
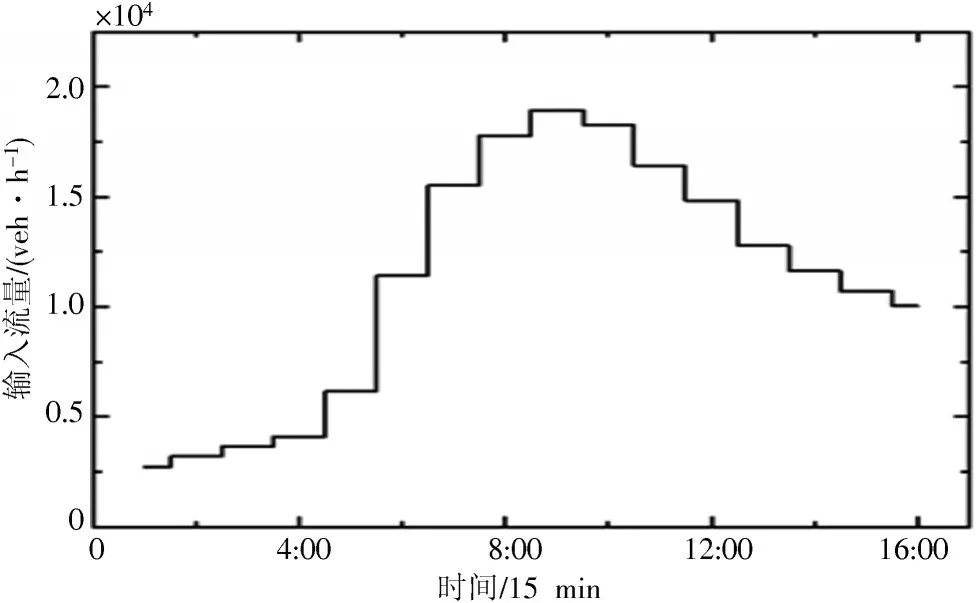
图1 路网4 h 输入车流量图
2.2 仿真结果分析
图2 所示为时变参数模型的预测方法在所测试的道路上每个路口的平均排队长度的绝对差异。从图中可以看出:各个路口的采样值表现出一致的裱花规律,说明未发生交通拥堵情况。
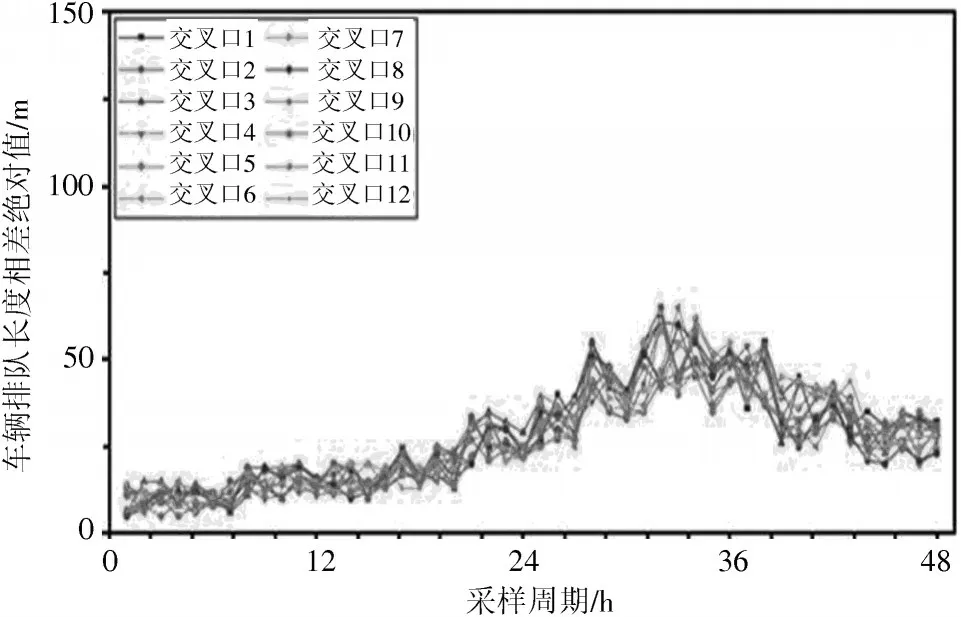
图2 车辆排队长度差值
利用VISSIM 模拟评估函数,得到了三种交通方式下道路最大排队长度、平均速度和平均延误的参数曲线,如图3 所示。结果表明:在采样周期前12 h 内,固定配时、模型预测控制、时变参数模型预测控制这三种方法的性能指标差别不大,而在不满足条件下,每个路口采用的定时调度方案充分地分散了各路口的排队数量,采用模型预测控制的方案没有显著的优越性;在7:00—9:00 时段,使用时变参数的模型预测控制效果较好,道路上的最大排队长度和最大延迟比其他两种方案都要小,而道路网络中的交通流量则显著高于其他两种方案。其主要原因在于:在道路流量超过饱和时,采用该模型的预测控制算法可以对网络的实时状况进行实时修正,从而改善道路的运行性能。
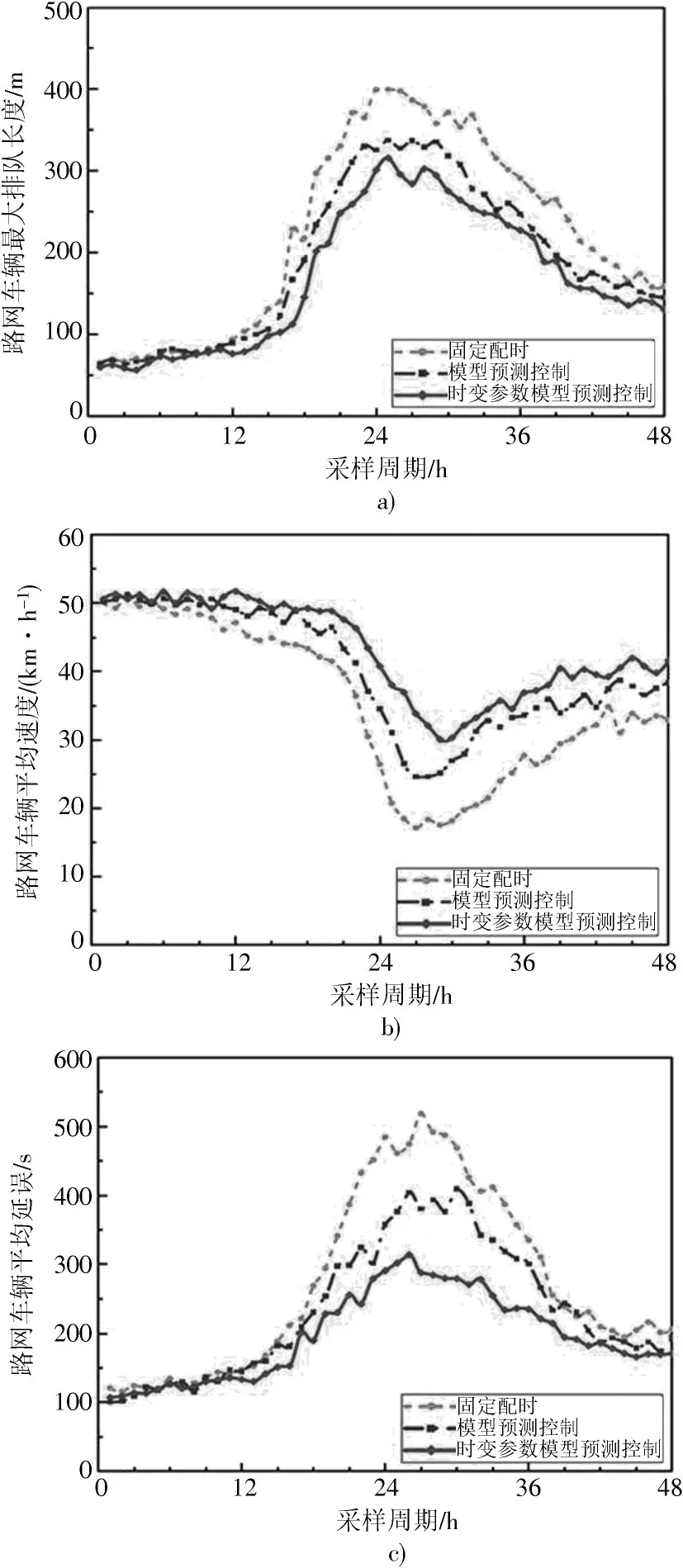
图3 三种控制策略下路网的车辆参数
图4 所示为8:00 时段三种控制策略的道路阻塞状况。由图可知,本文方法具有较好的性能。
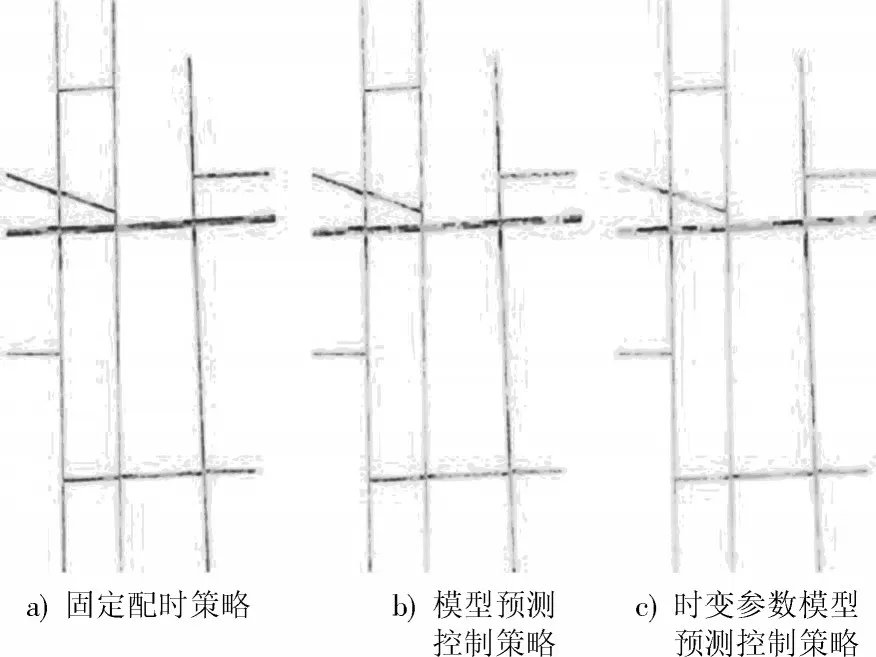
图4 三种控制策略下路网的拥堵情况
在一定范围内,路网内与初态差值的扰动项随着城市路网交通流系统运行状态改变而产生波动,尽管随机性较大,然而在局部时间段运行周期内,城市路网均易受到干扰[13]。相比之下,当随机扰动在系统中产生时,自适应迭代学习辨识算法可实现对系统期望输出的快速跟踪,具有较快的收敛速度和良好的效果。
3 结 论
1) 采用时变参数模型预测时,每个路口的排队长度差异都是比较合理的,模型和仿真结果接近。采用该模型的预测控制算法可以对网络的实时状况进行实时修正,从而改善道路的运行性能。
2) 模拟8:00 道路阻塞状况结果表明,本文方法具有较好的性能。相比之下,当随机扰动在系统中产生时,自适应迭代学习辨识算法可实现对系统期望输出的快速跟踪,具有较快的收敛速度和良好的效果。



