解振华 陆军航空兵学院 101123
基于双回路pid控制算法的微型四旋翼设计
解振华 陆军航空兵学院 101123
【文章摘要】
使用经典PID控制算法实现位置控制回路和姿态控制回路。PID算法简单可靠,理论体系完备,而且在长期的应用过程中积攒了大量的使用经验,在飞行器位置和姿态控制应用中具有良好的控制效果和较强的鲁棒性,能提供控制量的较优解。
【关键词】
微型四旋翼;动力学模型;pid控制;试验
0 引言
微型四旋翼具有良好的悬停性能,在室内等狭小空间内能够出色的完成侦查任务,具有良好的操作性能。随着对四旋翼飞行器的研究的不断深入,其控制算法也不断的优化升级。本文以两路内外环pid控制算法为基础结合自身实验,从零制作了一款可实现起飞,悬停,翻滚,偏航等复杂运动的微型四旋翼。
1飞行动力学建模
建立两个机体坐标系和惯性坐标系,用欧拉角来表示飞行器的飞行器姿态,根据受力分析(如图1),合理忽略空气阻力的影响,即可以得出如下公式
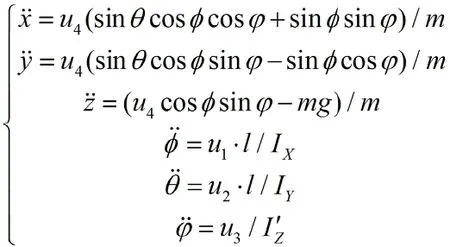
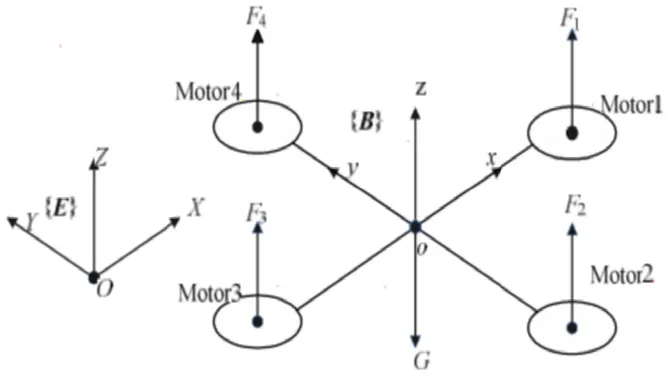
图1 飞行器受力原理图
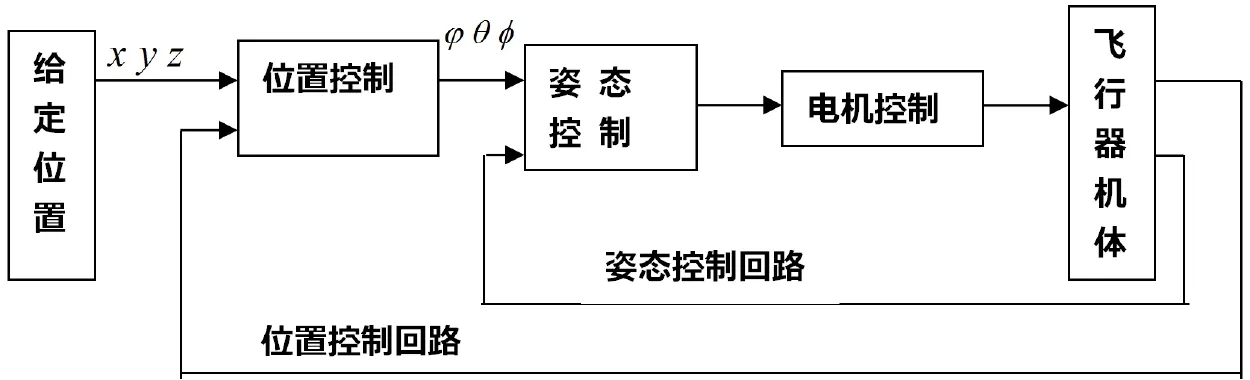
图2 四旋翼飞行器控制算法结构图

u2=F4-F2
u3=F3-F1
u4=F2+F4-F3-F1
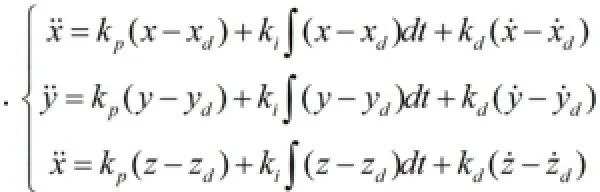
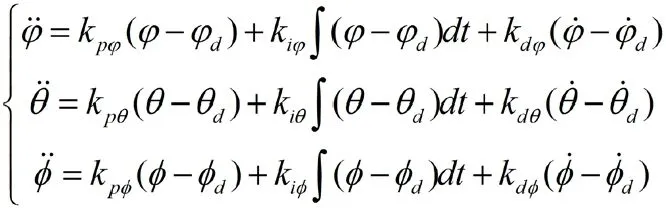
2 双回路PID控制算法结构分析
在动力学模型的基础上,将微型四旋翼飞行器实时控制算法分为两个控制回路,即位置控制回路和姿态控制回路。算法结构如图B-1所示。
使用经典PID控制算法实现位置控制回路和姿态控制回路。PID算法简单可靠,理论体系完备,而且在长期的应用过程中积攒了大量的使用经验,在飞行器位置和姿态控制应用中具有良好的控制效果和较强的鲁棒性,能提供控制量的较优解。
3 硬件设计
3.1飞行控制模块设计
采用stm32最小开发板作为飞行控制核心,它能够不断收集来自陀螺仪加速度仪以及超声波测距器传递的有关飞行器位置姿态的信息,并通过pid闭合控制回路,通过比对控制误差,转化成每个电机的pwm波输入量,进而改变飞行器的受力状态。
3.2传感器模块设计
传感器部分采用mpu6050模块和超声波测距器。mpu6050可以实时得到飞行器实时的偏转,翻滚,偏航的姿态信息,并通过卡尔曼滤波算法将信息实时反馈给飞控,供飞控的决策分析,超声波测距器可以实时得到无人机的飞行高度,并结合加速仪得到的z轴速度、加速度信息反馈给飞控,从而实现飞行器的定高功能
3.3动力能源模块设计
主要采用2204kv2300电机搭配5030桨叶作为动力源,银燕12A电调作为驱动装置,使用25c1500ma电池作为飞行能源经电源分压模块,分别给飞控及电调供电。
4 试验及总结
调试过程面临的主要困难,主要是无人机3轴PID控制量的调节。
采用试凑法的方式进行调参数。分以下几个步骤进行
4.1先从P开始调起,将I、D的数值设置成0。如果发现飞行器的左右晃动幅度角度越来越大这时候应当减少P的值。如果发现飞行器直接朝一侧倾倒,说明P的值过小。如果发现左右晃动幅度相当,则进入步骤2
4.2调整D的值。如果D的值加上之后,飞行器出现剧烈抖动,反应过快。则说明D的值较大,如果飞行器仍然左右晃动较大,则增大D的值。如果发现没有恰当的值可以使得四旋翼平稳飞行,则应当重回到步骤1,换个P值继续试凑。直到飞行器能基本平稳飞行,则进入步骤3
4.3将I的值设置为P的十分之一左右的值进行试探,直到飞行器能较好平稳飞行。
本文利用stm32最小开发板作为飞控,在动力学模型的基础上,将微型四旋翼飞行器实时控制算法分为两个PID控制回路,即位置控制回路和姿态控制回路。测试结果表明系统可通过各个模块的配合实现对电机的精确控制,具有平均速度快、定位误差小、运行较为稳定等特点。
【参考文献】
[1]李 俊,李运堂.旋翼飞行器的动力学建模及PID控制.辽宁工程技术大学学报(自然科学版).2012,2.
[2]张广玉,张洪涛,李隆球,王林.四旋翼微型飞行器设计.哈尔滨理工大学学报第3 期.2012,6.



