何德,何毅斌,李晶
三维自动进样系统的结构设计与运动学分析
何德,何毅斌*,李晶
(武汉工程大学 机电工程学院,湖北 武汉 430074)
数字PCR设备三维自动取样系统是完成数字PCR检测仪设备核心结构。根据电子设备高精密度和紧促性要求,以丝杆步进电机与滑动导轨相结合的驱动设计方式能够有效提高机器工作精度、降低运动噪音。取样针采用双层结构设计,使设备能够有效实现无污染反复取样,并能够实现自动清洗。利用多刚体运动学理论,通过ADAMS软件完成三维运动系统的运动学仿真,结果证明了系统运行的精密性和可靠性,运动能满足要求。
数字PCR检测仪;自动进样;取样针;ADAMS
数字PCR检测技术作为最新一代聚合酶链式反应(Polymerase Chain Reaction,PCR)技术,对生物基因检测不依赖标准曲线而能达到绝对定量、实验精度高,在基因检测领域有巨大应用前景。三维取样系统的设计与研究是重要环节,本文设计以丝杆步进电机与滑动导轨相结合方式、结构紧促、精密度高的三维取样进样系统,采用双层取样针实现采样的反复进行。对其结构进行运动仿真,得出取样针各个方向位移、加速度的变化,验证满足设计要求。
1 三维取样平台的结构设计
1.1 驱动方式选择
目前实现三维机构传动目前主要有三种方式[1]:步进电机与皮带轮(同步轮)设计;丝杆步进电机(伺服电机)与直线滑动导轨;两种方式混合使用。丝杆电机通过脉冲信号控制电机运动,能保证运动的稳定性和高精度要求。同时由于电机运动路程较短,采用丝杆步进电机作为系统的驱动力,直线导轨相比于皮带轮传动平稳性更高,更能满足系统的高精度要求。因此,选用本设计选用丝杆步进电机和直线滑动导轨的驱动方式,来控制三维系统的运动。
1.2 取样针的设计
取样针是取样系统的核心部件,取样针通过连接件固定在轴运动方向上,为保证取样的反复进行,设计为内层和外层的双层针(图1),内层用于取样,外层主要用于取样完成后通清洗液清洗取样针内层外壁、以防止试剂间的相互干扰。工作时,内层连接负压机构进行负压取样,取样完成后,外层连接正压机构通清洗液对取样针内层外壁进行清洗。取样针内外壁保持光洁,焊接处选用A022不铸钢焊丝,焊接完成后抛光处理。取样针外层使用PTFE镀层加工和金属渡层加工,PTFE渡层加工可增强防水性、减少交叉污染。取样针内层内外径为0.6 mm和1 mm,外层内外径为1.4 mm与1.8 mm。材料选用316L不锈钢,具有很好的防腐蚀性能。取样针零件如图1所示。
1.3 主体结构设计
运动平台采用组装式原则,、、三个方向相互垂直,根据运动范围确定轴机构设计,再确定轴,最后确定轴。通过有序设计和计算保证设计过程合理性与可靠性,所以从下至上三个方向上主动件和从动件的运动方式可设定为笛卡儿坐标系中的、、三轴向。由于三轴的装配关系直接影响整体运行的精度,故各部件的接触表面都要求保持相应的精度。通过三维取样平台的驱动系统,、、轴电机与滑动导轨分别控制整个机构的、、运动。丝杆连接末端通过弹性管套连接,降低系统运行时的震动强度。连接取样针轴臂上有压力传感器,当针头压力过大时可通过压力传感器反馈使整个机器停止工作。在每个轴的运动方向上,通过槽式光电开关确定零点位置,通过限位柱限定系统的最大运行路程,防止系统出现故障而产生更大的破坏,从而实现机构通过三维空间的任意位置。整体结构如图2所示。
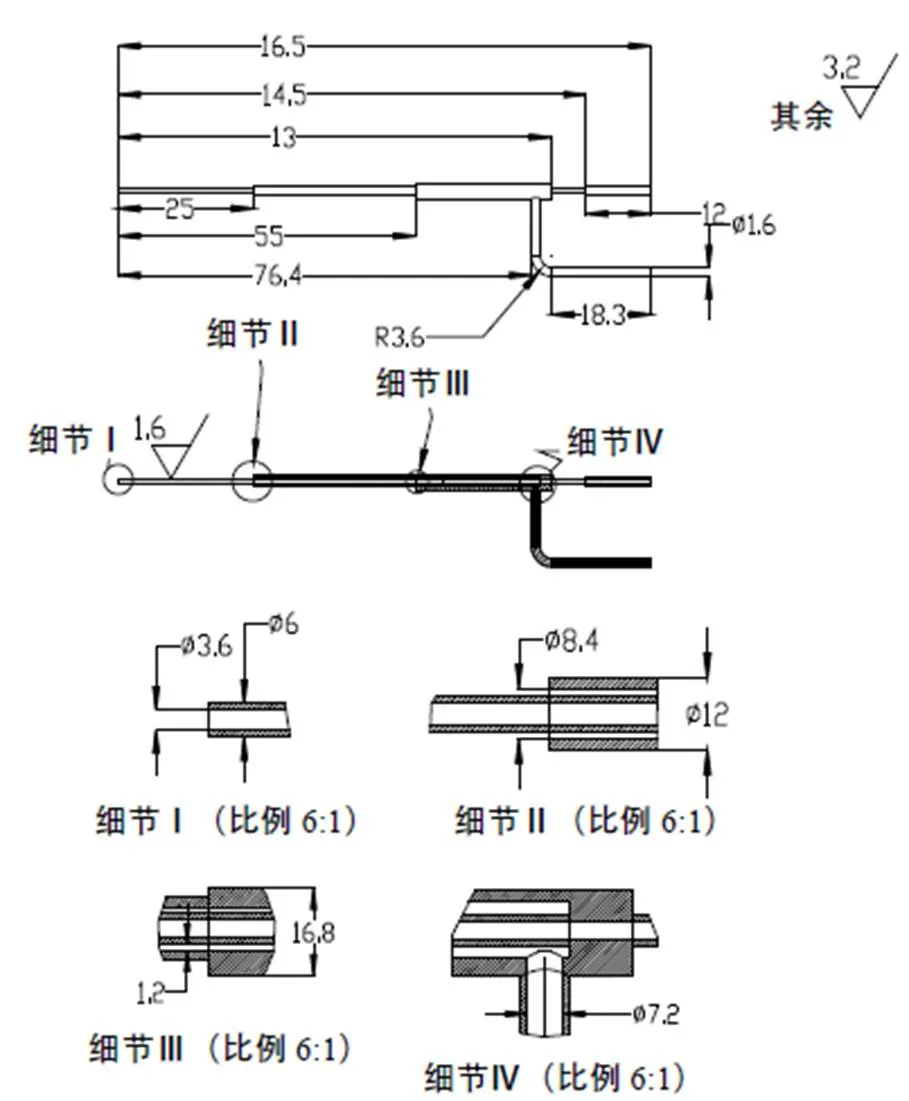
图1 取样针零件图
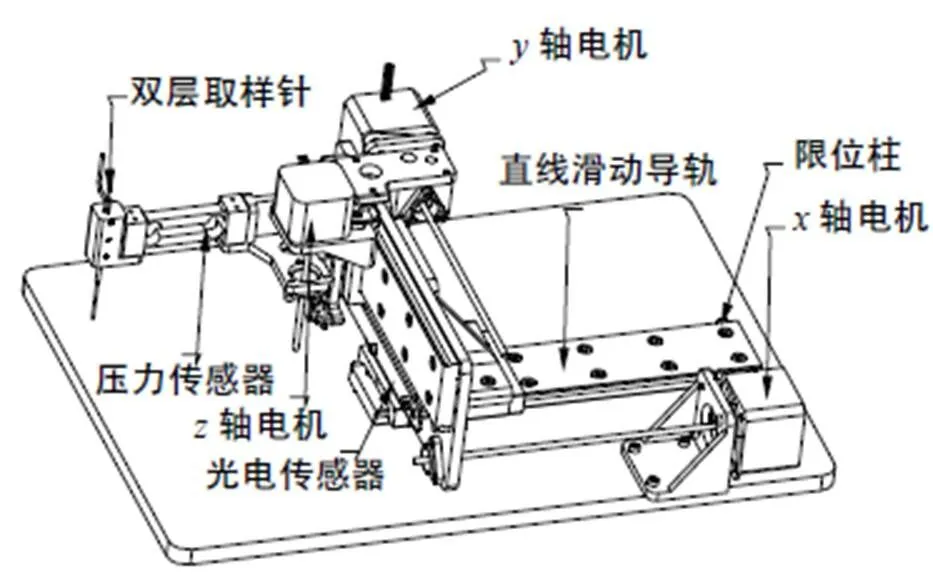
图2 三维运动机构整体结构图
2 基于ADAMS的运动学仿真
2.1 三维运动机构仿真模型的建立
做运动学仿真之前需构件物理模型,通过对部分零部件进行一定抽象和简化,将固定螺栓和不重要零件去掉,为构建运动学模型提供实体模型。在Creo软件中输出.X_T文件导入ADAMS。多刚体系统运动学模型中部件(part)的定义并不一定要与实际工程零部件一一对应,通常只将与运动形态密切相关的零部件定义为部件,而与运动无关的零部件通过合并操作进行组合形成一个构件,从而减少整个运动系统的构件数,以降低运动学模型的复杂程度[2]。
主要步骤为:①定义材料属性,选择材料为steel;②重命名部件;③将相对位置不变的零部件创建固定副,在电机轴与固定板上创建圆柱副、在滑动导轨上创建移动副;④在移动副上添加驱动,设置驱动函数;⑤设置求解器。
三维运动机构多刚体运动学模型[3]中所有的零部件都是采用不会变形的刚体,通过运动副的相互约束将处于自由状态的零部件连接构具有相对运动关系的机构,并设置滑移副、旋转副等运动副的主从运动关系,设置固定副固定元件,最后通过添加驱动使得整个的机构自由度为0。
2.2 多刚体运动机构仿真
由实际工作过程可知,三维运动平台需要、、三个方向上的运动,需要三个运动控制 Motion来实现,通过测量取样针到达取样点三个方向的距离,确定、、三个方向的运动距离。、方向同时进行,到达取样点上方后再移动轴。通过驱动程序控制电机的运行速度和时间,三维机构运动参数如表1所示。
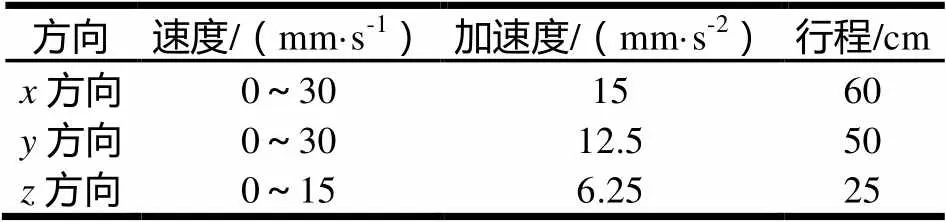
表1 三维机构运动参数
将运动参数方程输入Motion中,模拟一个完整取样过程,选择GSTIFF积分器进行求解,通过后处理,选择最后分析,选择结果分析,选择取样针,分量选择速度和加速度,得出取样针的加速度和位移曲线如图3所示。可知,在18 s的一个取样流程内,取样针沿轴方向往复运动60 mm、沿轴方向往复运动50 mm、沿轴方向往复运动25 mm,刚好完成一层完整的取样,加速度分别为15 mm/s2、12.5 mm/s2、6.25 mm/s2。由唯一曲线可知在8~10 s时间段内,、、方向位置没有发生变化,取样针在定点取样,运动仿真过程满足需求。
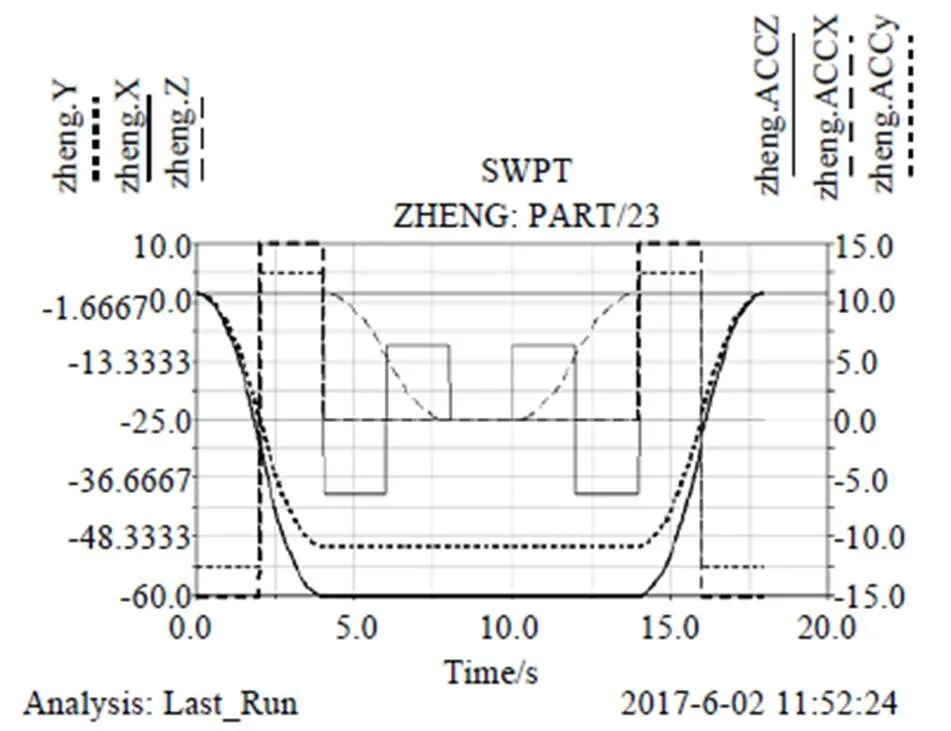
图3 取样针加速度与位移仿真图
3 小结
双层取样针的设计能够很好地满足重复进样而又不会带来污染,光电传感器和限位柱的使用能够保证运动精度的准确性,通过以丝杆步进电机和直线滑动导轨为驱动部件的三维取样平台满足了取样系统的高精度需求。最后通过ADAMS运动学仿真,反应出了运动的真实工作情况,与实验预期结果相同,验证了三维自动取样系统的可靠性,满足了设计要求。
[1]莫易敏,魏丽娜,姜宏霞,等. 微型汽车离合器操纵机构传动比的研究[J]. 机械研究与应用,2009,3(2):26-28.
[2]李坚. 单立柱有轨巷道式堆垛机结构及多体系统动态仿真分析[D]. 重庆:重庆大学,2006.
[3]吕博. CT-SIM激光灯定位系统的设计研究[D]. 沈阳:沈阳建筑大学,2011.
Structural Design and Kinematics Analysis of 3D AutoSampling System
HE De,HE Yibin,LI Jing
(School of Mechanical and Electrical Engineering, Wuhan Institute of Technology, Wuhan430074 , China )
Digital PCR equipment, three-dimensional automatic sampling system is to complete the core structure of the PCR detector device, according to the high precision of electronic equipment and tightening requirements, to study the screw stepper motor and sliding guide combination of drive design, can effectively improve Machine work accuracy, reduce movement noise. Sampling needle with double-layer structure design, so that equipment can effectively achieve repeated pollution-free sampling, and can achieve automatic cleaning. The kinematic simulation of the three - dimensional motion system is completed by ADAMS software. The results show that the system is accurate and reliable, and the kinetic energy can meet the requirements.
digital PCR detector;autosampling;sampling needle;ADAMS
TP216
A
10.3969/j.issn.1006-0316.2018.03.011
1006-0316 (2018) 03-0043-03
2017-06-12
何德(1992-),男,湖北咸宁人,工学硕士,主要研究方向为生物分析仪器。
何毅斌(1966-),男,湖北武汉人,工学博士,教授,主要研究方向为机械设计仿真及轻量化。



