葛亚楠,徐 锋,2,王化明,2,葛 旺
(1.南京航空航天大学公共实验教学部 江苏 南京 210016;2.南京航空航天大学机电学院 江苏 南京 210016)
中国大学生工程实践与创新能力大赛是教育部高等教育司发文举办的具有公益性和影响性的科技创新实践竞赛活动,组委会秘书处设在大连理工,每两年举办一届[1-2]。竞赛的指导思想是“重在实践、鼓励创新、突出综合、强调能力”,举办的目的在于提高各高校工程实践和训练的教学水平,培养大学生的综合能力,为优秀人才的培养创造条件[3]。
本文以中国大学生工程实践与创新能力大赛——“智能+”赛道水下管道智能巡检赛项为依托,在南航工程训练中心设立水下管道智能巡检机器人设计、制造与控制一体化项目式课程,融合机械结构设计、机电控制、先进制造技术(快速成型和激光加工)和经济管理等多学科,理论与实践相结合;同时响应国家鼓励大学生创业政策,本课程在创新实践的基础上,让学生深入调研水下机器人行业,开展创业规划,形成商业计划书,为社会输送创业人才奠定基础。
1 实践教学课程总体设计
1.1 课程介绍及学情分析
本课程目前主要面向本校长空学院和自动化学院大三学生,共80 个学时。目前高校的课程主要以理论教学为主,并且课程门类众多,课程与课程之间的联系学生难以掌握,而目前社会急需多学科交叉的工程实践应用人才[4-6],高校作为输送人才的基地,为了适应“新工科”发展的需求,应积极开展项目式的教学实践课程,尤其以各类竞赛为导向,培养学生理论与实践相结合的能力,实现多学科交叉、赛课融合的新理念[7-9]。
1.1.1 学生认知特点与初始水平
理工科学生有一定的工科逻辑思维基础,对于结构设计原理和控制器工作原理的相关知识较易理解[10]。但由于实际工程经验的缺乏,导致理论与实际存在理解偏差,不能将课本上学习到的原理与实际相对应,实践水平有待提高,亟须通过理论学习与工程实际相结合,提高学习兴趣,提升思考以及创新能力。
1.1.2 学习习惯与能力分析
目前的大学生以“00”后为主,学生思维较为活跃,具有较强的学习能力,但自主学习的能力有待提高,更多情况下以教师授课为主,学习的积极性也有待提高,本课程的核心以学生主动探索学习为主,教师作为辅助引导的角色,学生以小组形式相互合作,共同完成水下机器人工程实践项目的目标。
1.2 教学目标设计
本课程依托中国大学生工程实践与创新能力大赛,紧贴人才培养目标,遵循学生的认知规律,从知识、技能、素质三个维度制订本课程的教学目标(见表1)。总体目标是按照给定任务完成水下管道检测的水下机器人结构设计、组装与控制,该水下机器人能够沿着水下管道运动,检测管道上的吸附物,并发出警报同时进行清理、移除、回收等;此外,在创新实践的基础上,让学生深入调研水下机器人行业,开展创业规划,形成商业计划书。

表1 水下智能巡检机器人课程教学目标
1.3 教学重难点及处理
目前的高校课程以理论为主,学生的工程实践能力、实际工程问题的解决能力有待提高[11-12],本课程结合中国大学生工程实践与创新能力大赛,多学科交叉融合,设立项目式课程,让学生在学中做,做中学,相互合作,提升综合实践能力;我国的芯片行业由于生产制造能力不足,其发展遭到了严重的“卡脖子”问题,亟须举国之力打造“中国芯”掌握话语权,高校作为输送人才的重要基地,更需要通过教学改革来提升学生的科技强国热情;本课程设立不同难度梯度的项目目标,主要分为基础目标、进阶目标和创新目标(表2)。学生以组内合作、组间竞争的方式,从易到难逐步爬升,不断挑战更高难度的目标,激发学生自主探索的潜力,实现自我突破。
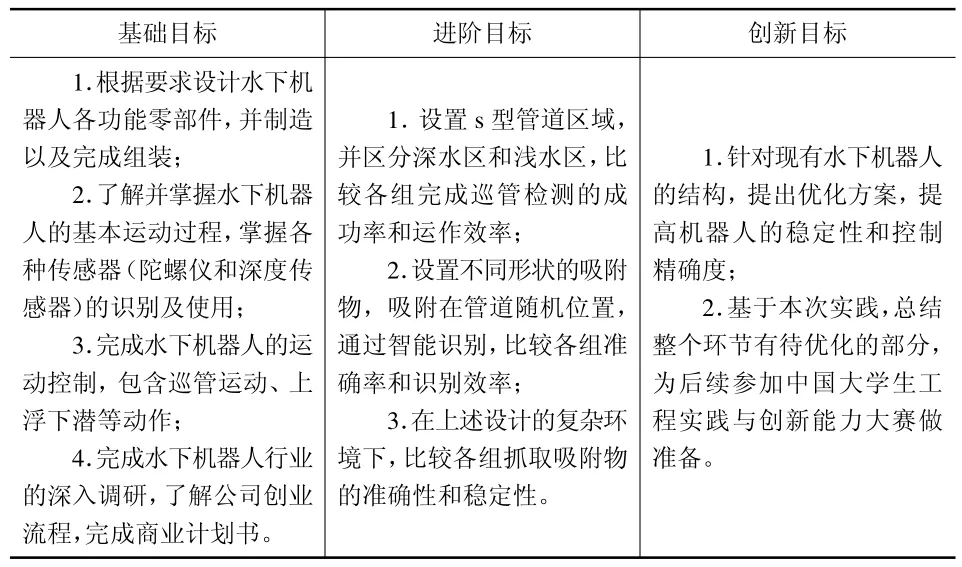
表2 水下智能巡检机器人课程项目目标
1.4 教学规划
水下管道智能巡检机器人设计与控制课程是基于水下机器人主题下体现专业交叉、科教融合、产学协同、实践育人理念的系统课程,课程内容覆盖控制、机械等多项专业知识,总学时为80 学时。具体时间安排如表3(p87)。
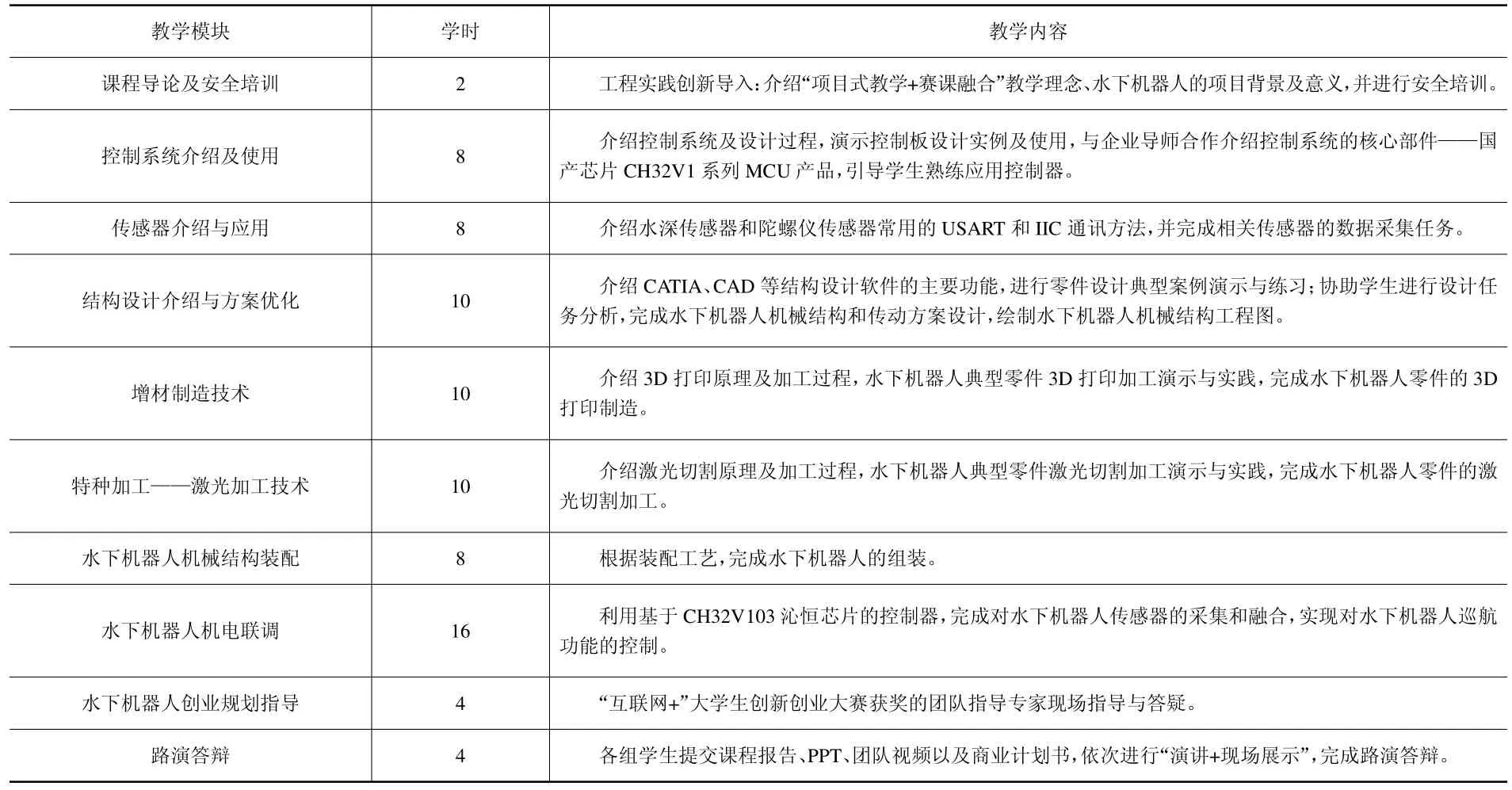
表3 教学规划表
2 实践教学内容及组织实施方法
教学内容主要分为机械结构设计、零部件制造、机电控制和组装调试四个部分。
2.1 机械结构设计
课前:教师通过学习通APP发布课程机械结构设计与制造的基本知识,并设定预习目标以及布置相应预习作业,让学生通过网络、图书馆和短视频平台自主查找相关资料,并且组织线上讨论,完成课程基础的学习。
课中:授课围绕“提出问题—分析问题—工程实践—总结回顾”的思路展开。在提出问题环节,结合课程思政——习近平总书记从党的十八大以来一直强调的海洋强国建设理念,以及水下机器人实际应用场景:水下探测、水下生物研究等,启发学生思维:水下机器人由哪些重要部分组成?从而引出本课程讲授的结构设计目标和设计原理;在分析问题环节,通过启发、提问和讨论的形式,逐步引导学生分析问题和解决问题,比如“接触密封法”是如何实现水密封的,其原理是什幺?通过“理论分析+工程实践”观察密封的可靠性;在工程实践环节,通过小组合作,分工完成水下机器人的动力布局方案设计、密封方案设计和机械装配方案设计等,从而完成整体结构设计;在总结回顾环节,让各小组派代表总结发言,通过本节课学习到的知识点、实际应用过程中遇到的问题以及解决的方法,最后教师进一步总结归纳,强调重点和难点,加深学生对理论知识的印象。
课后:教师通过学习通APP布置作业,比如“对于水下巡检机器人,还有哪些适用的密封结构设计”“如果你参加中国大学生工程实践与创新能力大赛,你会怎幺设计密封结构”等问题,激发学生自研和创新的热表,为后续参加竞赛做出相应准备。
2.2 零部件制造
2.2.1 CAM 教学
这部分教学内容主要集中在零部件设计与选择相应的加工工艺,首先确定设计软件(CAD 和CATIA),根据不同专业需求开展相应的CAM 课程教学,在教学前让学生先设计好产品,以产品为导向进行学习。
2.2.2 3D 打印和激光切割
强调实验安全注意事项,以及实际工程中存在的问题,比如加工误差使得设计要留有余量等,学生根据规范进行设计产品的加工制造。
2.3 机电控制
2.3.1 企业参观学习
实地到南京沁恒微电子有限公司参观学习,与企业资深芯片开发工程师交流,以实际工程项目为案例,提升学生的学习兴趣,激发其科技强国的热情。
2.3.2 理论学习+工程实践
以项目目标为导向(水下管道自动巡航、障碍物识别与抓取),讲授相关基础控制理论知识,学生相互合作,在实践中发现问题,解决问题,最终完成水下机器人的主体功能调试。
课前:教师通过学习通APP发布课程机电控制基本知识,以及复习前面机械结构设计的相关内容,并设定预习目标和布置相应预习作业,让学生通过网络、图书馆和短视频平台自主查找相关资料,并且组织线上讨论,完成课程基础的学习。
课中:贯彻“提出问题—分析问题—工程实践—总结回顾”教学思路,在提出问题环节,复习结构设计的相关内容,衔接密封结构设计,导入本节课要讲授的主要内容:水下推进器无刷直流电机调速系统的控制,配合推进器控制系统讲解开展推进器下潜动作及水下密封效果验证环节;在分析问题环节,针对无刷直流电机调速系统对控制器的要求,通过启发、提问和讨论的形式,逐步引导学生分析问题和解决问题,比如同学们知道哪些电动机种类,各种不同电动机的应用场合,分别是通过什幺原理进行调速控制的;在工程实践环节,学生分组以团队合作方式完成相应任务控制方案的制订、程序编写调试、下水验证、程序修改等机电联调操作,学生通过动手实践、验证、发现问题和解决问题的过程,成为课堂主角,教师起引导作用;在总结回顾环节,各小组以汇演的形式介绍本组的控制方案和作品演示成果,教师对学生实操过程中的共性问题进行剖析,并对机电联调过程进行总结归纳,使学生更深刻理解控制、驱动和机械本体之间的联系。
课后:教师通过学习通APP 布置作业,比如如何在控制程序的基础上添加PID 反馈,在湍急的水流中,如何控制可以使得水下机器人更为平稳地运动等问题,锻炼学生的工程实践能力,为后续参加竞赛打下扎实基础。
2.4 组装调试
以中国大学生工程实践与创新能力水下管道智能巡航赛道的项目考核要求为指引,在指定的水池完成相应功能的调试。
3 课程考核
最终的课程考核成绩主要分为小组成绩和个人成绩,其中小组成绩由竞赛测评PK、创业方案考核、社会实践报告成绩构成,占90%(竞赛测评PK,占比40%;创业方案考核,占比40%;社会实践报告:10%)。
个人成绩评定方法:10%(根据本组在思想政治、遵守纪律、工程规范、勤俭节约等方面的表现评定)。
4 结语
中国大学生工程实践与创新能力大赛以“竞赛为人才培养服务,竞赛为教育质量助力,竞赛为创业就业引路”为宗旨,为大学生提供了展现自我的舞台。南航工程训练中心以“智能+”赛道中的水下管道智能巡检竞赛为指导,开设水下管道智能巡检机器人的设计与控制实验课程,实现“以赛促学,以赛促教,赛课融合”的教学理念,体现两性一度的“创新性”;教学规划环节融合机械设计、机电控制和经济管理等多学科,在传统实践课程中引入创新创业环节,为社会输送创业人才奠定基础,体现“高阶性”;针对授课对象进行了学情分析,从知识、能力和素质三个维度设计了教学目标,并设置了三个难度梯度的项目目标(基础目标、进阶目标和创新目标),体现“挑战度”。在后续教学过程中,通过以赛促创,为水下管道智能巡检机器人实践课程的持续改进提供源源不断的动力,在工训课程中形成良好的示范。



