崔雄文 刘传银 周杨 李剑鹏 冯冬阳
摘 要
毫米波雷达在工业界有着广泛的应用,尤其在室内态势感知和人员目标跟踪上有着精确度高、鲁棒性强、全时段可用的特点。毫米波雷达室内应用的基础是房间大小的自动测量。本文针对毫米波雷达室内大小测量的问题,对接收到的雷达数据立方进行数据重整、距离维脉冲压缩、capon波束形成谱估计得到静态热度图,然后对热度图数据做恒虚警率检测得到点云数据,最后在点云数据的基础上进行最小二乘得到房间尺寸。
关键词
毫米波雷达;室内测量;脉冲压缩;恒虚警率检测
中图分类号: TM935.4 文献标识码: A
DOI:10.19694/j.cnki.issn2095-2457.2020.11.021
0 引言
毫米波雷达是最近几年迅速发展起来的感知设备,在工业界有着广泛的应用[1-2]。毫米波雷达相对于传统雷达,具有载频高、穿透性能好、带宽高的优点。波长较小的特点使其相对于普通雷达,发射天线和接收天线的尺寸更小,发射功率和辐射功率更低,人体安全性更高,同时具有更易便携的特点。除了在自动驾驶上的应用外,在智慧家庭、智慧城市中也有较好的应用。相对于光学测量设备,毫米波雷达在室内态势感知和人员定位上精度更高、部署更为方便、隐私性更好且不受光照和天气变化的影响。
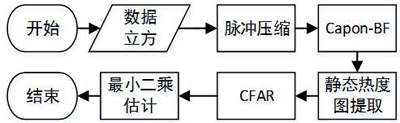
在毫米波雷达室内应用中,房间边界的计算和确定是重要的基础,得到精确的房间尺寸后,可以对测量得到的噪声目标、杂波目标进行可靠的筛选剔除,从而得到更为精确有效的测量结果。由于受噪声、杂波、多径效应的影响,房间尺寸的测量较为困难。本文针对基于毫米波雷达房间尺寸测量这一问题,结合高分辨率到达角估计算法capon-BF、恒虚警率检测及最小二乘估计方法,得到一种实用鲁棒的房间尺寸测量方法。工程应用表明,这种方法能较好地测量房间尺寸。本文提出的房间尺寸方法流程图如图1所示。
1 毫米波雷达房间尺寸测量方法
1.1 距离脉冲压缩
本文采用的毫米波雷达为调频连续波(FMCW,Frequen cy-Modulated Continuous Wave)体制,在这种体制下,同一个发射阵元发射出去的信号,在经过不同目标发射之后,不同距离上的被探测目标对应的回波信号被同一个接收单元接收,得到的回波因为距离不同会引起接受回波频率上的不同调制,因此,将同一接收单元得到的不同啁啾周期对应的回波序列进行最优匹配滤波后,所得到的中频信号中包含的频率信息即为目标对应的距离信息。由于在得到的回波数据立方体中,距离引起的频率调制分量完全分散到不同的速度和角度单元中,因此需要采用脉冲压缩的方法将分散的距离调制频率分量集中到一起,这个过程从形式上与雷达波形脉冲压缩一致[3]。
具体的做法为:对数据立方(Data Cube)根据发射单元、接收单元进行数据重整,提取同一个发射单元和同一个接收单元对应的回波序列,对该序列进行离散傅里叶变换(Discrete Fou rier Transform,DFT),得到变换后的序列,即可实现距离脉冲压缩。为使方法计算更为快速,采用实时性更高的快速傅里叶变换(Fast Fourier transform)代替DFT来实现脉冲压缩。
1.2 Capon-BF
对数据立方进行脉冲压缩后,得到三维距离序列。为了获得目标的位置,除了需要计算反映目标远近的距离信息外,还需要计算反映目标方位的角度信息。
角度的测量主要通过多个接收单元之间的相位差来计算,因此雷达采用多发多收体制。不同方向的目标反射得到的雷达回波,在相同的接收单元序列上会有不同的相位差调制,对接受单元的相位差序列进行反解,即可得到目标的角度信息。
相位序列的反解和距离维脉冲压缩的实现方法一样,同样可以通过对同一发射单元同一时刻不同接收单元得到的回波序列做FFT,从而得到不同方向目标的发射角度。但是FFT方法受限于物理角度分辨率的限制,无法精确地对角度进行测量,因此,本文采用可以实现超分辨率测角的capon波束形成(Capon Beamforming,capon-BF)算法[4],从而得到关于目标距离和角度信息的热度图(heatmap)。
1.3 CFAR
热度图反映了不同距离单元上不同角度目标的回波反射强度,对热度图做频率上的滤波操作,即可以实现动态目标的剔除,从而得到静态目标的热度图,简称静态热度图(static heatm ap)。静态热度图包括了所有噪声、杂波干扰以及感兴趣目标的距离和角度信息,因此,采用恒虚警率检测方法(constant false rate alarm,CFAR)即可以将真实的目标从器件噪声、环境杂波及干扰等无用信息中提取出来,从而得到房间墙壁及房间内各种目标的距离和方向[5]。
CFAR方法的核心是在保证虚假目标检测的概率不大于某个值的情况下,最大可能地将真实目标完全检测出来。在实现方法上,通过计算待检测单元附近其他单元的热度图强度的平均值,以该平均值和允许的虚警率得到目标检测的阈值。然后,比较待检测单元的强度和该阈值,如果待检测单元强度大于该阈值,认为待检测单元存在目标;如果待检测单元强度小于该阈值,则认为待检测单元不存在目标。
1.4 最小二乘估计
完成CFAR检测后,既可以得到房间墙壁在空间上的角度和距离分布,又可以得到房间内人员及物体(桌子、椅子、风扇等)的角度和距离分布。计算房间的尺寸大小就是要保证在存在这些人员和物体目标的前提下,利用房间墙壁的反射回波信息,将房间的尺寸计算出来。
从CFAR得到的目标距离和角度分布信息上看,墙壁附近目标点数较多,且沿着强度分布比较均匀,而房间内人员及物体点数相对较少,没有明显的方向或者距离上的均匀性,即非墙壁目标的空间位置分布比较零散杂乱,利用这一特性,本文采用最小二乘法,计算三面墙壁的位置。
以左面墙壁为例,首先我们假设左面墙壁在某一位置,然后计算毫米波雷达左边阵面通过CFAR得到的所有的目标点离该墙壁的距离平方之和,由于真实墙壁附近目标点数目较多而且目标点沿着墙壁方向呈均匀稠密分布,因此墙壁真实位置对应的该距离平方之和应该最小,这种方法从原理上类似于数学上的最小二乘法[6],通过这种方法即可以简单准确地定位墙壁的位置。右边的墙壁以及前方的墙壁位置可以通过同样的方法计算得到。计算得到三面墙壁的位置,结合已经知道的毫米波雷达安装的位置,即可以将房间大小计算出来。
2 实验结果及分析
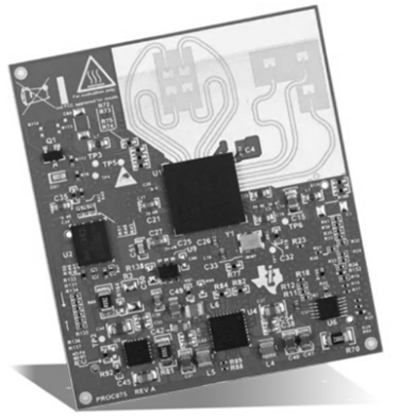
在本文涉及的实验中,选用的毫米波雷达为美国德州仪器公司(Texas Instruments,TI)制造的工业级毫米波雷达解决方案,如图2所示。
IWR6843发射载频为60GHz到64GHz,带宽为4GHz,天线设计采用MIMO体制,有3个呈L状排列的反射单元和4个呈田字型排列的接收单元,高分辨率的IWR6843传感器是专为工业性能所设计,可提供高达4GHz的超宽宽带,此解决方案能够以高于24GHz窄频达16倍的准确度来侦测物体及其动作。
为了验证本文方法的有效性,在大小会议室及一个生产车间进行验证,实验相关代码采用标准c语言和matlab语言混合编程,编译平台为gcc及matlab2018b。工程应用上认为计算精度在1m之内即可认为计算准确。
表1为三个房间的计算结果和真实尺寸。其中,计算结果和真实尺寸中分别为左边墙壁、右边墙壁和前方墙壁的参数值,从表格中可以看出,所有场景的计算误差都小于1m,即所提出的方法在三个房间内都实现了准确的尺寸测量。
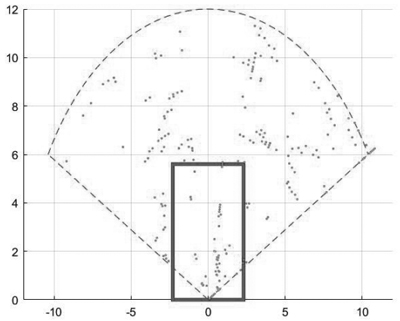
图3 为小会议室单次测量结果为小会议室的一次测量结果,其中蓝色的点表示经过cfar检测以后的目标点云,而红色的线表示本文所提方法在最小二乘之后的结果,可以看出,在点云密集分布的前提下,本文所提方法仍能得到墙壁的位置。
3 总结
本文采用FMCW体制的毫米波雷达,提出了一种方法对房间的尺寸大小进行准确测量,实验场景表明,本文所提出的方法是准确可行的。
参考文献
[1]马晓岩.现代雷达信号处理[M].国防工业出版社.
[2]孙美玲,熊毅.浅谈智能网连系统中77GHz毫米波雷达的应用[J].科技视界,201 9,27(14):31-32.
[3]郑大青,陈伟民,陈丽等.基于幅度调制的连续微波雷达测距研究[J].电子与信息学报,2015,37(1):43-39.
[4]刘振,孙超,刘雄厚等.一种加权稀疏约束稳健Capon波束形成方法[J].物理学报,2016,65(10):104343.
[5]李丽,王晓玲,桂杰等.恒虚警技术处理方法综述. 激光杂志,2018,39(1):8-13.
[6]龚循强,李志林.稳健加权总体最小二乘法[J].测绘学报,2014(9):888-901.



