王少聪 张仁喜 苗子沛 于典琨 杨汶鑫

摘 要:目前,无人机在物流行业得到广泛应用,但无人机运行过程中仍存在着诸多安全问题,如无法得到及时控制,与飞机相撞等。为优化无人机路径规划方法中的高度问题,首先,本文对比目前国内主要的路径规划方法并了解各种方法的优缺点;其次,以人工势场法为基础对无人机高度规划模型进行建立;最后,在模型中进一步对规划路径进行分段平直化处理,使规划路径简洁且符合无人机运行特点。实验结果表明,在原有算法的基础上针对无人机运行高度做出调整之后,无人机运行安全系数得到提高且对无人机的运行效率基本不存在影响,飞手也可较快完成对规划路径的熟悉。
关键词:无人机;路径规划;人工势场法;高度
一、引言
近些年来,无人机凭借着时效性、廉价性及可达性等优势在农业及物流业受到了广泛的关注。但是物流无人机的运行仍然存着很多的安全问题,如路径规划中的高度设置问题,起降点规划,配货点等的选择都是有着很大的影响。就路径规划而言,无人机路径规划不仅使无人机在使用过程中节省能源,高速高效地完成指定任务。也解决了最后一公里的配送问题。
国外对无人机的路径规划做出了相应研究,Stecz Wojciech[1]等人提出带有SAR应用的无人机任务计划,Vahid Jamshidi[2]等人进行了控制器局域网上并行遗传算法和并行粒子群优化算法的无人机路径规划分析研究,Franklin Samaniego[3]对固定翼无人机多目标优化的平滑3D路径规划做出研究。国内众多学者对此问题进行了深入的研究,耿增显[4]等人提出采用飞控软件详细分析无人机路径规划的设计、实施过程。李大林[5]等提出了一种基于Pythagorean Hodograph曲线的无人机路径规划方法。宿勇[6]提出使用五次PH曲线进行初始曲线生成,对PH算法进行改进;任佳[7]等提出基于威胁状态预测的模型预测控制(MPC)算法,田阔[8]等同样对MPC算法做出研究,李翰[9]等提出引入时间并采用A*算法进行搜索路径,张启钱[10]等同样使用A*算法做出研究,白杰[11]等提出基于分散搜索的混合搜索算法,毛晨悦[12]、刘砚菊[13]等针对人工势场法做出研究。
本文主要针对目前无人机路径规划中的安全高度问题基于人工势场法做出研究,提出针对高度的人工势场法改进方案,在保障无人机运行效率的前提下,对无人机的运行安全作出保障。
二、路径规划方法简介及改进方法的提出
2.1路径规划方法简介
无人机路径规划是指[14]:在给定的规划空间内,寻找无人机从起始位置到达目标位置且满足给定约束条件和性能指标的最优或可行航路。
随着物流无人机快速发展,终端无人机物流成为民航业内普遍关注的热点。但是物流无人机的运行仍然存着很多的安全问题,如路径规划,起降点规划,配货点等的选择都是有着很大的影响,如何解决最后一公里的配送问题成了本文需要探索的方向。无人机路径规划通过人工势场法规划路径,使用MATLAB进行建模,最后通过终端软件进行飞行路线模拟使得路径更加安全、便捷、高效,这就是无人机路径规划的意义所在。
当前针对路径规划提出了A*算法、蚁群算法、MPC算法等人工势场法等算法。如 A* 算法在单元中进行安全路径的搜索,但单元过多时无法确保得到最优路径; 蚁群算法在求解性能上,具有很强的鲁棒性和搜索较好解的能力,但蚁群算法计算量大,求解所需时间较长; MPC算法解决了约束控制问题,可对未来做出一定时间内的预测,但是对周围环境信息的提供有一定的要求;与上述算法相比,人工势场法具有计算简单、实现容易、实时性好、计算时间短、规划轨迹平滑等优点,因此得到了广泛的应用。但是目前,这些算法将无人机路径规划问题简化为平面内车辆的路径规划,本文引入高度约束规划处一条满足运行安全要求的运行路径。
2.2基于人工势场法的规划方法
2.2.1改进传统人工势场法的局部最小值问题
本文针对人工势场法存在的局部极小值问题采用刘砚菊等人的研究方法即在修改斥力函数的基础上提出修改斥力方向和自主建立虚拟目标牵引点相结合的算法。
2.2.2对无人机运行的高度改进
民航客机在各个运行阶段都存在着安全的运行高度,尤其是在客机进近这个距离地面较近的飞行过程中,以天津机场为例,民航客机进近高度要求为1000英尺,但要求在1500英尺左右截获下滑道信号。因此,本文类比客机的运行模式提出无人机在不同环境下的运行安全高度。
因为无人机相比于民航客机,尺寸很小不需要太大的超障余度,但是需要保证在有风或能见度较低的等特殊气象条件下可以保障无人机的运行安全,给飞手留有足够的反应操作空间,在此提出面对不同障碍物应有的超障高度h0。
本文使用大疆晓SPARK产品进行研究,无人机技术参数如表一所示:
在无人机运行过程中悬停精度记为△h ,△h=+/-10cm ,机身高为d=5.5cm ,无人机运行超障高度的提出主要以机身高度为单位,飞手在操作无人机飞行过程中的反应时间及无人机对操作做出反应的时间记为△t ,假设△t=2s ,提出无人机超障高度公式,
其中,建筑物和路灯等障碍物的高度一般较长时间内不会发生改变,但是树木等自然障碍物的高度是随时间一直发生变化的,因此针对树木等自然障碍物提出的超障高度要比人工建筑物高。但是路灯等占地面积小,与宿舍楼,教学楼等相比对无人机运行程度较小,进而提出不同n的取值。
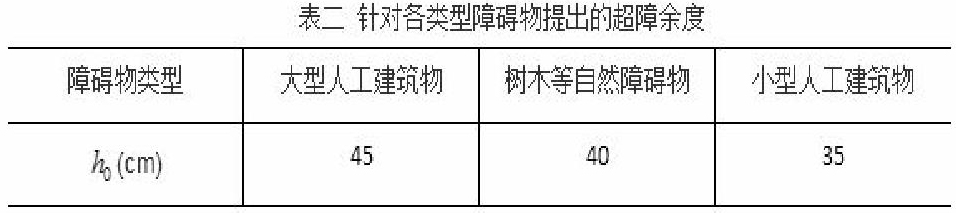
根据超障公式计算,并对结果进行以5cm为单位的向上取整,得出各类障碍物的超障高度h0 如表二所示,
2.2.3改进算法
在高度改进的基础上提出对算法的改进,改进算法的规划高度 为
其中h 为原算法中规划路径的高度,h0 为针对各类障碍物提出的超障余度,Hmax 为无人机运行最大高度。
在对路径规划做出初步修改之后所得规划路径存在较多的拐弯点或下降点,飞行状态一直发生改变,这就意味着需要飞手的不断操作,这会极大地增加飞手的操作负荷,针对这个问题,本文提出对规划路径的平直化处理,使得规划路径能够适当减小飞手操作负荷。根据规划路径中设置的飞行关键点对无人机路径进行划分,针对每个飞行路段分别提出自己的运行要求,进而使得规划路径平直,易于飞手操作。
无人机某个飞行路段的飞行高度变为:
Hi(i=1,2,3……) 为无人机路径规划某飞行航段中面对所有可能对在该点运行产生影响的障碍物时无人机应有的运行高度。△H 为所规划路径某两个飞行路段之间的高度差,l 为针对路段高度差无人机应在到达下一路段之前作出操作的距离,α 为无人机对应的爬升率或下降率。
本节通过超障余度对高度做出修正,并通过将规划路径分段处理获得每段路径的飞行高度,最后通过对路径的平直化处理完成对算法的修正,下文将正对算法进行仿真实验分析规划算法对无人机运行效率和安全的影响。
三、实验准备及实现
为了研究上述算法的可行性,本文以中国民航大学南院为假设场景,对中国民航大学南院部分主要障碍物进行了测量。以中国民航大学南院驿站附近某点为配送起点,南二十一公寓附近某点为配送终点,如图标示,绿色点为配送起点,蓝色点为路径过程中的关键点,红色点为配送终点。测量规划路径中的各障碍物的高度,如树高,公寓高,教学楼高,电灯高等可能对无人机运行产生安全影响的障碍物进行了全部测量。
此次测量使用测高仪器,通过多次测量得出规划路径上各类障碍物的高度如表二所示:
同时通过使用手机软件GPS工具箱获得无人机规划路径中各关键点的经纬度坐标,各点坐标如表四所示:
基于上述数据使用做出改进的人工势场法进行路径规划,得到路径规划结果如图二:
此次研究在原人工势场法的基础上提出对高度问题的修正,同时对规划路径进行分段平直化处理使得规划路径更加符合无人机运行特点。改进算法所规划路径急需要无人机在飞行过程中做出两次升降,而在原规划路径中无人机在起飞之后需要一直对无人机运行状态做出调整,但两条规划路径实际模拟飞行时间差别不大,进而得出结论,改进算法规划路径可极大地减少了无人机飞手的操作动作,并保证无人机可在视线范围内运行,同时对无人机运行效率的影响基本可以忽略不计。
四、结论
本文针对无人机路径规划过程中的高度问题做出研究,在人工势场法的基础上提出改进并获得了较为安全的飞行路径,同时对无人机运行效率的影响在可接受范围之内。此次改进提出了关于无人机运行高度规范的一种可能性,在原有试验的基础上,获得了无人机在高空中飞行时回避障碍物的有效方法。为无人机在路径规划上提供了试验依据和改进的方法,为无人机路径规划上做出了重要的试验依据,填补了目前无人机路径规划中高度设置的部分问题。但是此次研究实验次数较少,无法准确获得无人机在各运行场景应有的安全高度,使得无人机的规划路径更加精确。
参考文献:
[1]Stecz Wojciech,Gromada Krzysztof. UAV Mission Planning with SAR Application.[J]. Sensors (Basel, Switzerland),2020,20(4).
[2]Vahid Jamshidi,Vahab Nekoukar,Mohammad Hossein Refan. Analysis of Parallel Genetic Algorithm and Parallel Particle Swarm Optimization Algorithm UAV Path Planning on Controller Area Network[J]. Journal of Control, Automation and Electrical Systems: formerly CONTROLE & AUTOMA??O,2020,31(1-3).
[3]Franklin Samaniego,Javier Sanchis,Sergio Garcia-Nieto,Raul Simarro. Smooth 3D Path Planning by Means of Multiobjective Optimization for Fixed-Wing UAVs[J]. Electronics,2019,9(1).
[4]耿增显,赵嶷飞,孟令航,庞笔照.基于飞控软件的民用无人机路径规划研究.
[5]李大林,李杰,杨东晓.基于Pythagorean Hodograph曲线的无人机路径规划方法[J].制造业自动化,2011,7:50-68.
[6]宿勇.基于曲率连续曲线的无人机路径规划方法[J].舰船电子工程,2017,3:31-34.
[7]任佳,高晓光,张艳.移动威胁情况下的无人机路径规划[J].控制理论与应用,2010,5:641-647.
[8]田阔 符小卫 高晓光.威胁联网下无人机路径在线规划[J].西北工业大学学报,2011,3:367-373.



