潘晓云 雷晶晶 董德武 杨一帆

关键词:消毒机器人;视觉识别;远程操作;精准消毒
引言
2020年,新冠疫情的爆发,让所有人都认识到了生命的脆弱与珍贵,也意识到了自我安全防护的重要性和必要性。纵然已经历世纪变迁,科学技术实现了较大飞越,但传染病最有效的防控方式依然是针对传染源、传播途径、易感人群的隔离、消毒、以及接种疫苗等干预手段。由此,小组成员从当前社会防疫工作需求出发,我们设计出了这样一款具有防疫消毒功能的智能消杀机器人,由弥雾消毒机和四轮机器人底盘组成,可通过远程遥控、自主导航消毒等方式进行消毒作业,可代替工作人员进入高污染环境进行消毒作业。
1 消毒机器人的设计来源与市场分析
1.1设计来源
在新冠疫情的影响下,大众越来越重视环境消毒问题,尤其是在防疫要求下,由机器人来消毒则成为了极为有效的消毒方式。如今更是有传染率极高的德塔尔病毒在世界范围内传播,所有角落的病毒消杀工作都不能有丝毫懈怠。在这样的背景下。我们的消毒机器人应运而生,设计出了这款体型较为娇小,方便于各地形消杀工作且提高了针对狭窄地区的消杀要求的新型智能消毒机器人。
1.2市场分析
基于消毒机器人设计原理、创新思想与市场应用前景的分析,我们团队将消毒机器人进行了改造设计,以此来提高消毒效率,自动化程度,自身防护能力及对环境的适应能力。解决人工消毒中化学物质即时对人类产生危害的问题,进行远程半自动化操作,按照提前规划的路线进行消杀工作,减少对工作人员的危害。在新冠疫情的大局势影响下,防疫消杀工作愈发重要,尤其是在人口密集的地区,如:小区、商场、写字楼等,都需要彻底地做好消杀清洁工作。而这款消毒机器人的智能连接并工作,不仅使我们将时间高效地利用到更需要的地方,还能够实时监测到消杀实况。机器人还能自动规划路径及躲避障碍,从而有效地进行工作,降噪功能与小巧的身型还能减小机器人工作时对人类正常生活的影响。
2 消毒机器人的结构介绍及智能连接
2.1结构介绍
机器人外形主体结构由弥雾消毒机、四轮机器人底盘和麦克纳姆轮组成。
(1)弥雾消毒机
此机型相较于传统机型来说喷出的消毒剂更加细腻,覆盖范围更广。而轻盈的消毒剂滴能在空气中漂浮更长的时间,更易附着在墙壁及物体表面,有利于消毒有效时间的延长及消毒效果的提高。
(2)四轮机器人底盘
底盘主要用于消毒剂的装载,其中设置有警戒线和红外感应装置,当设备内消毒剂低于警戒线时,设备会自动发出警报并在与设备相连的手机平板等智能设备上显示出来。每隔一段设定时间机器人也会提醒进行排出消毒剂干燥清洁工作以保证机器的洁净并延长工作寿命。为了克服普通轮式小车在狭小环境无法移动工作的缺陷并提高消毒机器人在运行过程中的平稳性,我们采用了全向驱动技术。麦克纳姆轮控制可使小车具有更大的灵活性,系统以多变量协同控制的方式从多角度获取小车信息,能够更加立体、精准、直观地判断小车方位,从而完成自动化操作。其总体设计效果如图1所示。
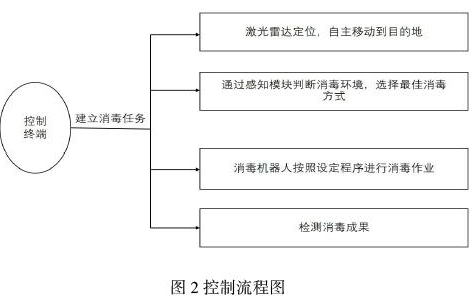
为了减轻人工的负担、保证操作人员的安全,我们为机器人配备了智能模块,其中包括自感知模块、视觉雷达、机器学习算法、机器人云、激光雷达、超声波雷达等;感知模块,其中主要括药品监测,人体监测,判断消毒成果等,以实现机器人的自动化。程序路线需在机器人最初使用时工作人员结合控制终端引导其进行智能化学习并规划工作路线。其控制流程如图2所示。
由于传统的摇杆、按键等交互方式具有操作繁琐、不灵活、接口没有统一的标准等缺点,已不能满足于当今的智能服务要求,故我们在设计初期就采用了Android 与ROS交互通信的可靠性设计。在机器人连接场地wifi后操作人员就能在平板控制终端或手机上直接建立消毒任务,选择消毒目的地与消毒时间等,然后机器人通过激光雷达导航定位自主移动到目的地,接着利用视觉和自感知模块对消毒场所进行自动场景识别,根据场地的不同选择不同的消毒水平与消毒方式。
(1)自感知模块
自感知系统主要包含防碰撞、过热、跌落模块和避障模块。应用红外线传感器与超声波传感器结合的方式,确保避障功能的实现。通过接触式传感器与光电开关传感器结合保障防碰撞功能。
(2)电池能源
如市面上常见的扫地机器人一般,此机器人具有超长续航时间,且可在设定休眠时间到之后或电池电量低于设定之后自动回位充电。其充电也采用了非传统插电,而是接触式充电,如新型电动牙刷般回位即充。
3 智能消毒机器人未来发展方向
以预防为主是传染病防控的首要策略。我国一直以来实行“预防为主”方针, 但当前的情况不甚理想,从深化医改的主要任务来看,政策重点依然在医疗和医院。而在人口基数如此庞大的中国,进一步的官方预防极大概率就是在公共场合投放消毒机器人。
随着深度学习,自动化、大数据等先进技术的应用,消毒机器人在功能和应用场景上将会进一步的提升和完善。例如:实现快速和多手段复合消毒;针对不同区域实现定点分类消毒;优化消毒模式及运动路径,减少资源浪费;实现消毒清洁一体化操作,只要按需提前规划操作,就可将消毒、清扫、烘干等工作一次性进行到底;可精准检测医护人员、患者等形体轮廓,实现快速定位消杀;具备人体检测功能,防止对人员造成伤害;丰富消毒材料种类,实现药品智能配比、输送,实时监测用品流量,提高消毒成效;实现环境样本回收,搜集消毒区域样本,帮助检测人员快速判断消毒成果;提高产品自身防护等级,可进入高辐射、高温、高病菌场所开展作业;还可对机器本身拓展到农业等大规模式喷洒消毒等。
其应用场景多元化且适用性强,前景良好,可批量生产销售。
4 结论
防控疫情至今,在医疗手术、诊治、体温检测、配送、消毒杀菌等众多场景中,我们看到机器人有效的代替相关人员进行作业,从而减少或降低了很多不必要的风险。针对公共卫生领域消毒机器人存在开发成本高、维护性差等问题,我们的智能消毒机器人不仅可以有效的解决这些问题,还在原来的基础上增加了自动化智能化模块,使机器人的工作效率提高的同时也降低了企业的生产成本,使此机器人可以大批量生产。
参考文献:
[1]刘小军,温宏愿,周军,崔宇豪.基于ROS的消毒机器人控制系统设计与实现[J].机床与液压,2021,49(11):17-21.
[2]李梦男,邵振洲,渠瀛,施智平,关永,魏洪兴.Android与ROS交互通信的可靠性设计[J].计算机应用与软件,2018,35(03):106-113.
[3]陈青华,单洪瑜,和蕾,朱晓莹.基于STM32的智能家用消毒机器人的设计[J].信息技术与信息化,2020(11):202-204.
[4]王琦,王丽.带麦克纳姆轮寻光追踪小车的设计与实现[J].工程机械,2021,52(03):1-7+137.
[5]邓依婷,徐曦,李亚宁,沈文.基于麦克纳姆轮的AGV小车[J].物联网技术,2021,11(01):65-66+71.
[6]王禅,陶莹,焦庆仕.新冠肺炎疫情下我国新发传染病的应对及启示[J].卫生经济研究,2021,38(09):38-41.
作者简介: 潘晓云(2002-),女,武汉商学院机器人工程专业,湖北襄阳人,在读本科,主要研究方向:工业机器人系统集成;
董德武(2001-),男,武汉商学院机器人工程专业学生,湖北黄冈人,在读本科,主要兴趣和研究方向有机器人控制,智能机器人编程。
杨一帆(2001-),男,武汉商学院机器人工程专业学生,湖北孝感人,在读本科,主要研究方向:智能机器人编程。
通讯作者: 雷晶晶(1990-),女,湖北武汉人,硕士,武汉商学院教师,工程师;主要研究方向:大学生创新创业教育。
基金项目: 大学生创新创业项目,项目号202111654003, 名称:病菌灭霸—新型智能消毒机器人。



