叶明侠 王 楠 张 哲 黄 柯 李立安 范文生 孟元光解放军总医院妇产科,北京 100853
机器人系统在子宫内膜癌分期手术中的学习曲线研究
叶明侠王楠张哲黄柯李立安范文生孟元光▲
解放军总医院妇产科,北京100853
目的 探讨达芬奇机器人系统在子宫内膜癌分期手术中的学习曲线。方法 回顾性分析2014年7月~2015年9月解放军总医院妇产科由同组医生完成的45例达芬奇机器人系统子宫内膜癌分期手术患者的临床资料,按手术时间先后顺序依次分为A、B、C组三组:A组15例,手术时间2014年7月~2015年1月;B组15例,手术时间2015年1~5月;C组15例,手术时间2015年5~9月。绘制学习曲线,并比较各组之间手术时间、术中出血量、术中淋巴结清扫数目、术中术后并发症、术后住院天数。结果 三组手术时间比较,差异有统计学意义(P<0.05),随着手术例数的增加,手术时间逐渐缩短。三组术中出血量、盆腔淋巴结清扫数、腹主动脉旁淋巴结清扫数、术后住院时间比较差异均无统计学意义(P>0.05)。手术例数与手术时间呈负相关(r=-0.321,P>0.05)。结论 有丰富腹腔镜子宫内膜癌手术经验的手术团队,经过30例的学习曲线,可掌握达芬奇机器人手术系统用于子宫内膜癌分期手术。
达芬奇机器人系统;学习曲线;子宫内膜癌;微创
[Abstract]Objective To discuss the learning curve and surgical outcome of Da Vinci robotic surgical system for hysterectomy with lymphadenectomy in treatment of endometrial cancer.Methods Clinical data of 45 cases which received Da Vinci robot-assisted hysterectomy with lymphadenectomy performed by the same group of surgeons from July 2014 to September 2015 in Gengneral Hospital of PLA were reviewed retrospectively.The cases were divided into 3 groups according to the sequence of the operation.Group A with 15 cases from July 2014 to January 2015,group B with 15 cases from January to May 2015,and group C with 15 cases from May to September 2015.Learning curve was drawn,and operation time,intraoperatve blood loss,umber of lymph nodes dissection,intraoperative and postoperative complications,postoperative hospitalization time of three groups were compared.Results There was a statistically significant difference between three groups in the operative time(P<0.05),and with the increase of operation number,the operation time was shorten.There was no statistically significant difference in intraoperatve blood loss,number of pelvic lymph nodes dissection,number of periaortic lymph nodes dissection,postoperative hospitalization time(P>0.05).The operation number was negatively correlated with operation time(r=-0.321,P>0.05).Conclusion After about 30 consecutive resections,the surgeons with abundant experiences of laparoscopic surgery for endometrial cancer surgery can overcome the learning curve and master Da Vinci robotic surgical system for hysterectomy with lymphadenectomy in endometrial cancer.
[Key words]Da Vinci robotic surgical system;Learning curve;Endometrial cancer;Microinvasive
2009年数据表明,每年大约有42 160例新发子宫内膜癌病例[1]。手术治疗是最主要的治疗方法,全面的子宫内膜癌分期手术包括全子宫双附件切除术、腹主动脉旁淋巴结清扫术、盆腔淋巴结清扫术。随着微创外科的发展,因其损伤小、恢复快而得到迅速推广,子宫内膜癌的手术方式从传统开腹逐步向腹腔镜、机器人手术系统转变。目前机器人系统是最先进的微创外科平台,在国内外已经广泛应用于胃肠道手术、泌尿系统手术、肝胆手术、心脏手术及妇科手术[2-7]。达芬奇机器人手术系统因其灵活的内腕系统,3D高清视野及震颤滤过使得其在子宫内膜癌的手术治疗中具有可行性[8-10]。本文回顾性分析解放军总医院(以下简称“我院”)妇产科45例行机器人子宫内膜癌分期手术治疗的子宫内膜癌患者的临床资料,分析在学习曲线的早期和熟练之后,手术操作过程是否影响手术结果。
1 资料与方法
1.1一般资料
选取2014年7月~2015年9月于我院行子宫内膜癌分期手术的子宫内膜癌患者45例。患者平均年龄(52.2±8.2)岁。所有手术由同一术者完成,该医生具有丰富的腹腔镜子宫内膜癌手术经验。按手术时间将患者分为A、B、C三组,A组15例,手术时间2014年7月~2015年1月;B组15例,手术时间2015年1~5月;C组15例,手术时间2015年5~9月。
1.2手术方式
所有患者均在术前由病理证实为子宫内膜癌,按子宫内膜癌全面分期手术行术前准备,采取膀胱截石位,头低脚高30°。气管插管全身麻醉,气腹压力12~14 mmHg(1 mmHg=0.133 kPa)。于脐上偏右或者偏左30°~45°,距脐8 cm处置入直径为1.2 cm穿刺器,安装机器人镜头臂,在镜头监视下在双侧腋前线,脐上1 cm处建立直径为0.8 cm的机器人专用trocar,分别放置单级电刀及双极钳。另以方便操作为原则建立2个辅助孔,使用吸引器及无创肠钳等辅助手术。术后管理与常规开腹及腹腔镜手术相同,鼓励患者尽早下床活动。
1.3观察指标及评价标准
主要观察手术时间、术中出血量、淋巴结切除数、术中及术后并发症,及术后平均住院天数。手术时间为从开始建立气腹到关腹的时间。淋巴结切除数目按照病理报告为准。并发症分为术中和术后并发症,术中并发症包括肠管、膀胱、输尿管、神经或者血管的损伤;术后并发症包括切口开裂、伤口感染、切口蜂窝织炎/盆腔脓肿、尿路感染、菌血症、深静脉血栓、肺栓塞、心肌梗死、肠梗阻和电解质紊乱。术后住院天数是从手术当日至出院的时间。
1.4统计学方法
采用SPSS 12.0统计学软件进行数据分析,符合正态分布计量资料的均数用均数±标准差(±s)表示,两组间比较采用t检验;计数资料用率表示,组间比较采用χ2检验,以P<0.05为差异有统计学意义。
2 结果
2.1三组临床特征的比较
三组患者的年龄、体重指数、既往腹部手术史比较,差异均无统计学意义(P>0.05)。见表1。
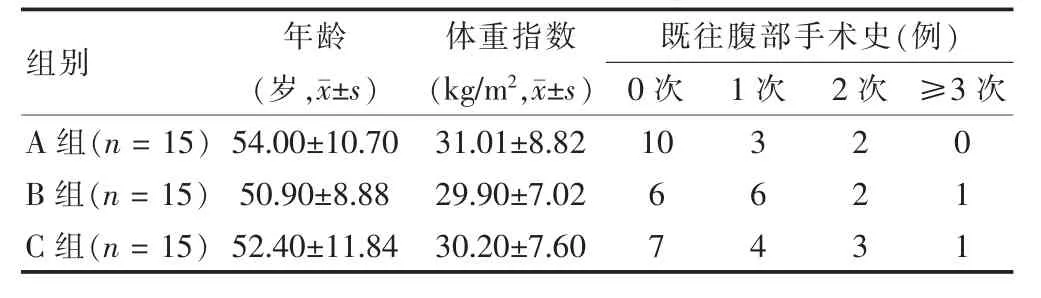
表1 三组临床特征比较
2.2三组手术情况指标比较
三组手术时间比较差异有统计学意义(P<0.05),且随着手术例数的增加,手术时间减少。其中A组与B组比较差异无统计学意义(P>0.05),A组与C组、B组与C组比较,差异均有统计学意义(P<0.05)。说明到第30例手术以后,手术时间较前减少。三组术中出血量、盆腔淋巴结清扫数、腹主动脉旁淋巴结清扫数、术后住院时间比较差异均无统计学意义(P>0.05)。见表2。
表2 三组患者手术效果比较(±s)

表2 三组患者手术效果比较(±s)
注:与A组比较,*P=0.006;与B组比较,#P=0.035
组别 手术时间(min) 术中出血(mL) 盆腔淋巴结清扫数(个) 腹主动脉旁淋巴结清扫数(个) 术后住院时间(d)A组(n=15)B组(n=15)C组(n=15)P值237.00±36.83 213.00±33.01 202.00±30.28*#0.008 121.00±97.85 105.00±68.52 100.00±37.80 0.772 29.20±8.85 34.00±8.99 27.10±9.65 0.198 3.50±0.90 4.60±2.59 3.47±2.00 0.329 18.80±4.87 17.30±4.76 14.80±4.11 0.099
2.3三组并发症的比较
所有病例无一例中转开腹。A组1例术后淋巴囊肿形成合并感染。给予经腹穿刺引流及抗炎治疗后痊愈。B组1例切口愈合不良,引流换药后痊愈。1例术中发现输尿管损伤,行机器人下输尿管修补,同时放置双“J”管,3个月后拔除双“J”管,预后良好。C组有1例术后合并感染患者,经抗炎治疗后好转。
2.4三组学习曲线
45例患者手术例数与手术时间呈负相关(r=-0.321,P=0.025)。见图1。
3 讨论
不同的手术方式学习曲线不同,不同的术者学习曲线也不相同。一般主要依据以下5个方面作为评判标准:手术时间、术中出血量、中转开腹率、术中及术后并发症、术后住院时间。目前报道显示,Altgassen等[11]分析了由33位妇科医生操作的929例腹腔镜辅助经阴道子宫切除手术的学习曲线为30例;Hwang等[12]报道腹腔镜下广泛子宫切除术加盆腔淋巴结清扫术的学习曲线为30~40例;达芬奇机器人下子宫切除手术的学习曲线为20~30例[13],机器人下广泛子宫切除术的学习曲线为28~30例[14-15],Peter等[16]比较了122例机器人及腹腔镜下子宫内膜癌分期手术,发现机器人的学习曲线为24例,而腹腔镜的学习曲线为49例。机器人学习曲线较腹腔镜短。我国机器人系统引进较晚,但发展迅速,目前关于机器人系统在子宫内膜癌分期手术中的学习曲线报道较少,本研究详细分析了机器人系统应用于全面的子宫内膜癌分期手术的学习曲线,手术时间与手术例数呈负相关,随着手术例数的增多,手术时间逐渐缩短,在手术例数达到30例时统计学分析出现差异。本研究推断机器人辅助腹腔镜手术的学习曲线为30例,这与国内外报道基本一致[16-18]。术中出血量随手术例数的增加而逐渐减少,虽然差异无统计学意义,但是在手术例数达到30例后,术中出血量达到平稳,术中淋巴结清扫个数及围术期并发症在各组间无明显差异。本组研究的特点因为该团队有着丰富的腹腔镜手术经验,学习曲线主要在于器械及手术方式的适应,在手术效果上差别不大。

图1 手术例数与手术时间的关系
机器人手术除具有传统腹腔镜的微创优点外,还拥有独特优势:Da Vinci机器人手术系统具有三维成像系统和独特的深度感知能力,视野放大10~15倍,便于对手术的控制。其器械臂末端有7个自由活动度,增加了操作的灵巧性,利于复杂的操作,如缝合、游离、结扎等。它可以过滤术者的手部颤动,提高操作的精度,在进行淋巴结切除时,精细的操作可以避免血管、神经损伤。尤其对于复杂的手术,机器人更有优势[19-20],此外术者坐在操作台进行操作,减低了劳动强度和感染风险,保持良好的手术状态。
达芬奇机器人手术系统亦有其不足之处,首要的是缺乏触觉压力反馈,这一点相对开腹手术及腹腔镜手术是相对较大的局限,另外是机器人术前准备工作相对复杂;手术器械比较单一,功能也有待改善。另外影响机器人在中国迅速推广的主要原因之一是机器人手术系统的费用较开腹手术和腹腔镜手术高[21-23]。
综上所述,总结本组45例达芬奇机器人系统行子宫内膜癌分期手术的经验,本组无中转开腹,前次腹部手术史的病例增加,但手术时间逐渐缩短,并且并发症无增加,在30例达到平台期。取得了比较满意的临床效果。手术早期及熟练之后手术过程对手术结果并无影响。学习曲线的长短和专业医师的临床经验与操作密切相关。对于复杂的手术,机器人更有优势。
[1]Jemal A,Siegel R,Ward E,et al.Cancer statistics[J].CA Cancer J Clin,2009,59(4):225-249.
[2]Rodríguez-Sanjuán J,Gómez M,Trugeda S,et al.Laparoscopic and robot-assisted laparoscopic digestivesurgery:Present and future directions[J].World Journal of Gastroenterology,2016,In press(6):180-182.
[3]S Duke H,Robert W,Nabil S.Future robotic platforms in urologic surgery:recent developments[J].Rev.méd.chile,2014,24(1):118-126.
[4]Tsung A,Geller DA,Sukato DC,et al.Robotic versus laparoscopic hepatectomy:a matched comparison[J].Ann Surg,2014,259(3):549-555.
[5]Ji WB,Wang HG,Zhao ZM,et al.Robotic-assisted laparoscopic anatomic hepatectomy in China:initial experience[J].Ann Surg,2011,253(2):342-348.
[6]Iribarne A,Easterwood R,Chan EY,et al.The golden age of minimally invasive cardiothoracic surgery:current and future perspectives[J].Future Cardiology,2011,7(3):333-346.
[7]Ontario HQ.Robotic-assisted minimally invasive surgery for gynecologic and urologic oncology:an evidence-based analysis[J].Ontario Health Technology Assessment,2010,10(27):1-118.
[8]Ran L,Jin J,Xu Y,et al.Comparison of robotic surgery with laparoscopy and laparotomy for treatment of endometrial cancer:a meta-analysis[J].Plos One,2014,9(9):1571.
[9]Sonali Patankar,Ana I.Tergas,Jason D.Wright.Comparative effectiveness research in gynecologic oncology[J]. Cancer Treat Res,2015,164:237-259.
[10]Cardenasgoicoechea J,Soto E,Chuang L,et al.Integration of robotics into two established programs of minimal-ly invasive surgery for endometrial cancer appears to decrease surgical complications[J].Journal of Gynecologic Oncology,2013,24(1):21-28.
[11]Altgassen C,Michels W,Schneider AI.earning laparoscopic--as sisted hysterectomy[J].Obstetrics&Gynecology,2014,104(2):308-313.
[12]Hwang JH,Yoo HJ,Joo J,et al.Learning curve analysis of laparoseopic radical hysterectomy and lymph node dissection in early cervical cancer[J].Eur J Obstet Gynecol Reprod Biol,2012,163(2):219-223.
[13]Yim GW,Sang WK,Nam EJ,et al.Learning curve analysis of robot-assisted radical hysterectomy for cervical cancer:initial experience at a single institution[J].Journal of Gynecologic Oncology,2013,24(4):303-312.
[14]曹莉莉,徐惠成,陈勇,等.达芬奇机器人手术系统在宫颈癌广泛子宫切除手术中学习曲线的研究[J].实用妇产科杂志,2015,31(9):705-708.
[15]Lin JF,Frey M,Huang JQ.Learning curve analysis ofthe first 100 robotic assisted laparoseopic hysterectomies performed by a sinSic surgeon[J].Int J Gynaecol Obstet,2014,124(1):88-91.
[16]Lim PC,Kang E,Park DH.A comparative detail analysis of the learning curve and surgical outcome for robotic hysterectomy with lymphadenectomy versus laparoscopic hysterectomy with lymphadenectomy in treatment of endometrial cancer:a case-matched controlled study of the first one hundred twenty two patients[J].Gynecologic Oncology,2011,120(1)413-418.
[17]Seamon LG,Cohn DE,Richardson DL,et al.Robotic hysterectomy and pelvic-aortic lymphadenectomy for endometrial cancer[J].ObstetGynecol,2008,112:1207-1213.
[18]Soliman PT,Iglesias D,Munsell MF,et al.Successful incorporation of robotic surgery into gynecologic oncology fellowship training[J].Gynecol Oncol,2013,131(3):730-733.
[19]叶明侠,李立安,李利,等.机器人辅助腹腔镜行卵巢癌手术13例分析[J/CD].中华腔镜外科杂志:电子版,2015,8(5):312-316.
[20]王萍.基于人体骨盆运动轨迹的康复辅助机构设计[J].北京生物医学工程,2015,34(5):482-488.
[21]Bell MC,Torgerson J,Seshadri-Kreaden U,et al.Comparison of outcomes and cost for endometrial cancer staging via traditional laparotomy,standard laparoscopy and robotic techniques[J].Gynecol Oncol,2008,111(3):407-411.
[22]Barnett JC,Judd JP,Wu JM,et al.Cost comparison among robotic,laparoscopic,and open hysterectomy for endometrial cancer[J].Obstet Gynecol,2010,116(3):685-693.
[23]Ramirez PT,Adams S,Boggess JF,et al.Robotic-assisted surgery in gynecologic oncology:a society of gynecologic oncology consensus statement:developed by the society of gynecologic oncology's clinical practice robotics task force[J].Gynecologic Oncology,2012,124(2):180-184.
Learning curve of robotic hysterectomy with lymphadenectomy in treatment of endometrial cancer
YE MingxiaWANG NanZHANG ZheHUANG KeLI Li'anFAN WenshengMENG Yuanguang▲
Department of Obstetrics and Gynecology,General Hospital of PLA,Beijing100853,China
R713.4
A
1673-7210(2016)05(b)-0166-04
国家科技支撑项目(2013BAI01B04)。
叶明侠(1980-),女,解放军医学院2015级妇产科学专业在读博士研究生;研究方向:妇科肿瘤。
2016-02-11本文编辑:任念)



