李 鑫
(三门核电有限公司,浙江 三门 317112)
0 引言
在工程实际应用中,PID控制以其结构简单、稳定性好、工作可靠、调整方便且不需精确的系统模型等优势,成为最为广泛的调节器控制规律之一。西门子PLC控制系统以其诸多优点已在工业控制领域得到广泛的应用,可以利用它的PID控制功能,很方便的实现对压力、温度、流量、液位等工艺参数的进行自动化监控。本文简要介绍了西门子PLC的PID参数整定方法,在工程实践中有广泛的应用价值。
当被控对象或参数不能完全掌握、或得不到精确的数学模型时、控制理论的其他技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术是最为方便的。总的来说,当用户不完全了解一个系统和被控对象,或不能采用有效的测量手段来获取系统参数时,最适合采用PID控制技术。
1 PID控制原理
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。根据系统的误差,利用PID参数计算出控制量进行控制的。
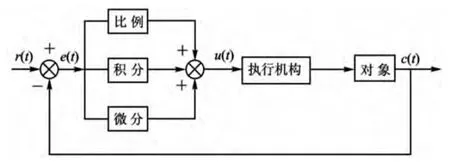
图1 PID控制原理图
那幺PID控制的输入e(t)与输出u(t)的关系为:
u(t)=Kp[e(t)+1/TI∫e(t)dt+TD*de(t)/dt]
式中积分的上下限分别是0和t,计算得到其传递函数为:
G(s)=U(s)/E(s)=Kp[1+1/(TI*s)+TD*s]
其中Kp为比例系数,TI为积分时间常数,TD为微分时间常数。
(1)比例环节:即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生减小偏差的控制作用。
(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。
(3)微分环节:能反应偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太 大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
2 PID控制的参数整定
PID控制器参数整定的方法很多,概括起来有两大类:一是,理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必能直接使用,还必须通过工程实际进行调整。二是,经验整定方法。它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、立竿见影,在工程实际中被广泛采用。
在西门子PLC控制程序设计中,只需理解PID的算法模型即可。STEP7的较高版本在标准软件库中提供专门的FB41/FB42/FB43标准PID功能块,用户只需要根据工艺控制要求,设定好相应PID控制参数即可,即 CYCLE、GAIN、TI、TD 等。
以三门核电AP1000机组的辅助蒸汽供应系统(以下简称ASS)控制PLC的FB41应用为例来重点介绍PID调节。
在SIMATIC S7可编程控制器上,FB41用于带有连续I/O变量的工艺控制过程。FB41的输入/输出参数很多,但是实际应用中根据控制要求,需要真正设定的参数实际上并不多,在ASS系统内的FB41调用参数主要包括:
输入:COM_RST (重置值初始为 0)、MAN_ON (手自动方式)、CYCLE (采样周期1s)、MAN (手动设定值)、SP_INT (压力设定值)、PV_IN(压力值反馈)、DEADB_W(死区设定:0.00e)、GAIN(增益 2.0)、采用的调节方式 (P_SEL、I_SEL、D_SEL 默认为 PI)、TI (积分时间20s)、TD ( 微 分 时 间 10s)、 调 节 值 上 下 限 设 定 (LMN_HLM50、LMN_LLM19.5)等等。
输出:LMN(调节值 0,地址 72.0)等等
利用STEP7自带的PID控制参数赋值工具进行调试和参数设定STEP7,具体使用如下:
(1)在线监测PID调节曲线时,可以选择在线的数据块。确认此数据块已正确下载到PLC中,并且计算机与PLC连接正常,在如图2界面中设置参数。
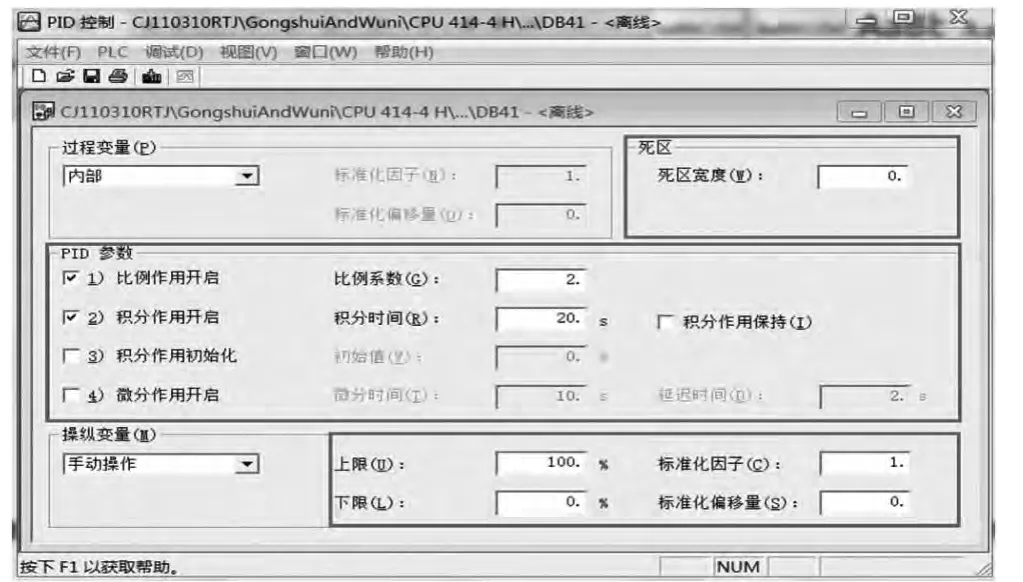
图2 参数设置界面
(2)点击Settings按钮,打开图3所示界面,进行曲线设置。

图3 参数在线设置界面
(3)在如图4界面中观察PID曲线的特性。通过点击启动/停止按钮来监控PID曲线,通过根据控制要求更改参数设置值,直到达到满意的控制效果。
3 结语
PID控制的参数整定是PID控制程序设计的核心内容。它是根据被控过程的特性确定PID控制的比例系数、积分时间和微分时间的大小。对于工程整定方法,一般需要调试人员具备一定的工程实际经验,需要耐心的进行反复的调试,才能达到满意的控制效果。
[1]廖常初.S7-400H PLC应用技术[M].3版.北京:机械工业出版社,2011.
[2]廖常初,祖正容.西门子工业通信网络组态编程与故障诊断[M].北京:机械工业出版社,2009.



