李潮 崔承勋


摘 要:由于中国人口多,导致住房紧张,在一间小屋子里有时连吃饭的桌子在不用的情况下都得收起来,十分麻烦。本文设计了一款全自动可扩缩餐桌,只需对它语音控制,它就能自动打开桌子,将桌子的面积增大一倍多。省时省力,不需要将桌子来回拆卸。
关键词:可扩缩;全自动;餐桌
一、序言
当今社会房价不断飙升,城市住房日益拥挤,家里的活动空间也是越来越小。一般家里的餐桌面积都较小,只够坐4-5人。而当家中有亲朋好友来作客时,由于餐桌太小,一般都采用加一个大面积的桌板放在原有的桌子上的方法来解决。而大桌板较重,体积大,在狭小的房间里移动很不方便,并且由于长期放置,需要花费时间清洗,十分麻烦【1】。而本文针对这个问题,所设计的餐桌具有大桌和小桌两种模式,用户可以根据需要选择不同的模式。两种模式之间的切换也十分快速,只需要半分钟的时间。两种模式的切换只需要用户对它进行语音控制即可,方便快捷【2】。
二、结构设计
本文所设计的餐桌有大小两种模式,选定的木板厚度为2cm,大桌模式是在小桌模式的基础上实现的,这样可以降低成本,提高利用率。在小桌模式下,四块扇形板拼合组成一块圆形桌板,四块扇形板可以在各自的滑槽内进行移动,如图1所示。在大桌模式下,由于要增大面积,小桌板的四个扇形块沿着滑槽向拼合的反方向进行移动,原先小桌板所在的平面出现了类似于一个“十”字形的空隙,为了扩大面积,我们需要这种形状的木板在小桌板所在的平面上与空隙完美贴合,从而增大桌板的面积。为了能组成这种形式的木板,又能在小桌模式下被隐藏起来,不妨碍用餐,我们将这种形式的木板分成两个部分,在本文中分别称为矩形块和中心块,如图2,图3。
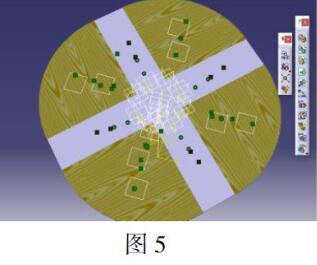
四个矩形块和一个中心块在小桌模式下均被隐藏在小桌板的下面,其中矩形块在中间层,距离小桌板背面3cm,中心块在最底下,与矩形块的背面距离为0cm,如图4所示。在小桌模式下,桌子的整体厚度为9cm,不会影响到用户的就餐。在大桌模式下,四个扇形块沿着滑槽向拼合的反方向进行移动,随后中间层的矩形块沿着有一定倾斜角度的滑道向上移动,最后最底层的中心块沿滑道竖直向上移动。当全部移动结束后,桌板完美拼合,桌板的面积大大增加,如图5所示。
三、传动系统设计
(1)为了实现四个扇形块能够在滑槽内进行移动,同时考虑到桌子整体的经济性问题,我们采用弹簧在压缩状态下将扇形块弹开的方法,使其完成沿着滑槽向拼合的反方向移动的运动。对于扇形块要完成沿着滑槽向拼合的方向移动,我们采用滑索一端与扇形块相连,另一端通过滑槽上的孔以及滑槽一侧的定滑轮与桌底中心立柱中的电机相连。通过电机的旋转,拉动着扇形块沿着滑槽向拼合的方向移动,移动到完美拼合的位置时,电机停止,并用可动插销固定,避免弹簧弹开。四个扇形块可由一个电机驱动,节约成本【3】。
(2)为了实现四个矩形块能够沿着倾斜滑道移动,我们采用丝杆螺母来实现运动。每个丝杆的顶端都有一个锥齿轮,而最底下有一个电机连接一个锥齿轮,电机带动锥齿轮旋转,锥齿轮与顶端的锥齿轮啮合使旋转运动传递到丝杆上,通过丝杆螺母从而实现了沿着倾斜滑道移动的运动,其上下移动只需控制电机的正转反转即可,驱动也由一个电机完成。
(3)为了实现中心块能够沿着滑道竖直上下移动,我们同样采用丝杆螺母来实现运动,控制电机的正转反转和停止就可以实现中心块与其他木板的贴合。
四、控制系统的设计
由前面所述,实现整个系统的运动需要四个电机来驱动,即扇形块的驱动,矩形块的驱动,活动插销的驱动,中心块的驱动。我们通过Arduino板编写程序对电机控制板进行控制,实现各个电机按一定的顺序正转,反转或停止。同时,Arduino板可以连接一个语音模块或wifi模块,给Arduino板一个输入信号,来实现语音控制或手机APP控制。
五、结语
通过这次的设计,我意识到创新设计的灵感可能就在一瞬间产生,而这一瞬间的灵感并非凭空出现,而需要你认真的思考,认真的想,一直往你想要创新或设计的方面上想。与此同时,创新设计的过程中要不断地优化自己的想法,使你的设计,创新更可靠,更经济,更容易实现。生活中肯定还有很多的创新和设计需要被创造出来,只要我们一直想,一直思考,社会会越来越好。
参考文献:
[1]程涛.现代室内设计与实务.广东科技出版社.1997.
[2]高志,黄纯颖.机械创新设计[M].北京:高等教育出版社,2010:56.
[3]谢阳里.现代机械设计方法[M].北京:机械工业出版社,2011:9.
作者简介:
李潮,延边大学工学院机械设计及其自动化专业,本科生.
通讯作者:崔承勋,延边大学工学院机械工程系副教授,博士.



