程 丽 肖道林,2 张 超,2
(1、沈阳大学机械工程学院,辽宁 沈阳110044 2、中国科学院沈阳自动化研究所,辽宁 沈阳110016)
小行星是太阳系中重要的天体组成部分,承载着重要的演化信息,是探寻太阳系物质起源的重要天体[1]。同时小行星含有富饶的稀有元素和贵金属,具有十分重要的价值[2]。
所以小行星表面取样研究已经成为各个国家重要研究的航天项目。
目前,小行星采样方式有射弹撞击、螺旋钻取、气体激励等方法。这几种采样方式都成功应用,本文优化设计的采样头是抓取式,具有结构简单、采存一体的特点。
1 采样头方案设计
小行星的采样主要是针对星体的表层物质进行采集[3]。本设计针对表壤地貌进行采集。飞行器通过机械臂连接采样器,采用TAG(Tough And Go)的方式进行采样。采样器与星壤触碰时间为3 秒,要保证采样器能触发闭合功能。
抓取式采样器是由采样头,采样转盘,转位模块,开腔模块组成,如图1 所示。可进行多次多点采样,因此采样器搭载了三个相同的采样头;提高了采样的成功率以及鲁棒性。
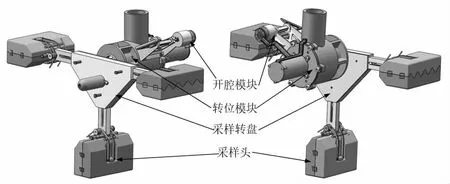
采样器可以携带三个采样头,可进行多次取样。机械触发式采样器集采样、样品保存一体,每个采样头既可以采样,又可以保存样品。
2 采样头工作原理
采样头是采样器最重要的部件,用于样品的收集和保存。采样是否成功以及样品是否能完好的保存有着至关重要的作用。主要是由两个形状上相似的腔门、触发杆、连杆和驱动扭簧构成。采样头在采样开始前是闭合状态(如图2 所示),依靠开腔模块的楔形块打开,并保持在死点状态;随后楔形块收回,转位模块带动转采样转盘继续旋转至采样位置并锁定。完全打开的采样腔(图2b)处于稳定的状态,处于中心位置的触发杆伸出,用于采样腔触发闭合的功能。
飞行器在竖直方向上以10m/s 的速度缓慢降落,由于反作用力的作用,触发杆受力,此时采样腔已经越过死点位置,在弹簧驱动下保持关闭采样腔的趋势。采样腔离开星表的瞬间,采样腔在驱动弹簧的作用下迅速闭合,并将采集到的样品保留在采样头中。
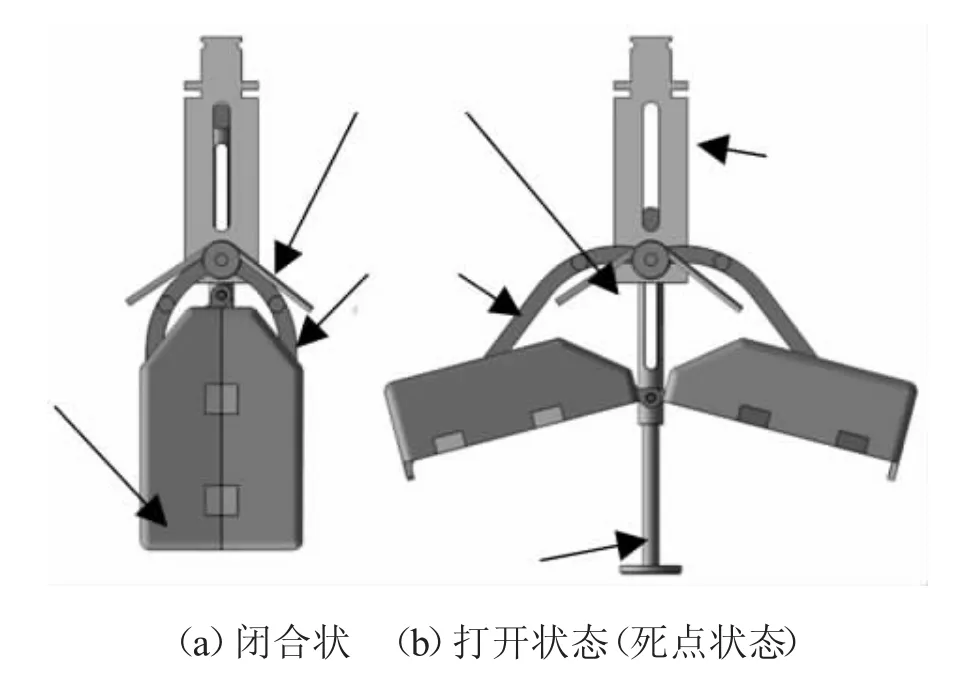
图2 采样头两种状态以及结构
3 采样头机构优化
采样头是采样器的核心部件,采样器能否成功采样起着至关重要的作用。为了采样头能顺利触发,对采样头各个构件的优化是必不可少的。一般优化设计问题是在n 维欧氏空间内寻找一个点X=(x1,x2,x3,…,xn)T,在满足gu(X)≤0 和hv(X)=0 约束条件时,使f(x)取最小值。上述优化问题可简写为
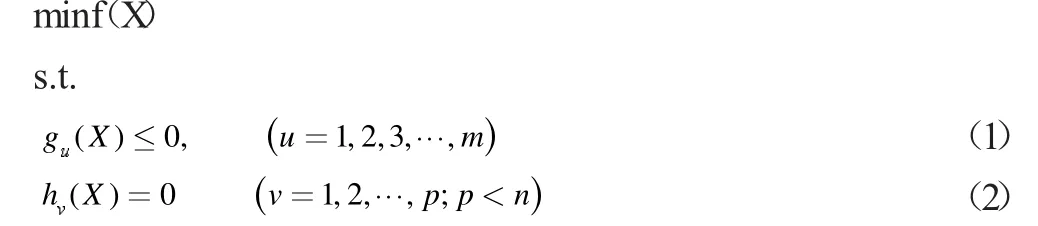
式中,f(X)、gu(X)、hv(X)为n 元函数;f(X)为目标函数;gu(X)为不等式约束条件;hv(X)为等式约束条件;X 为设计变量。
(1)确定设计变量。
对各个连杆的长度进行合理的设计,建立如下所述的数学模型,对于各个连杆的长度取最优,将采样头机构简化如图3 所示。
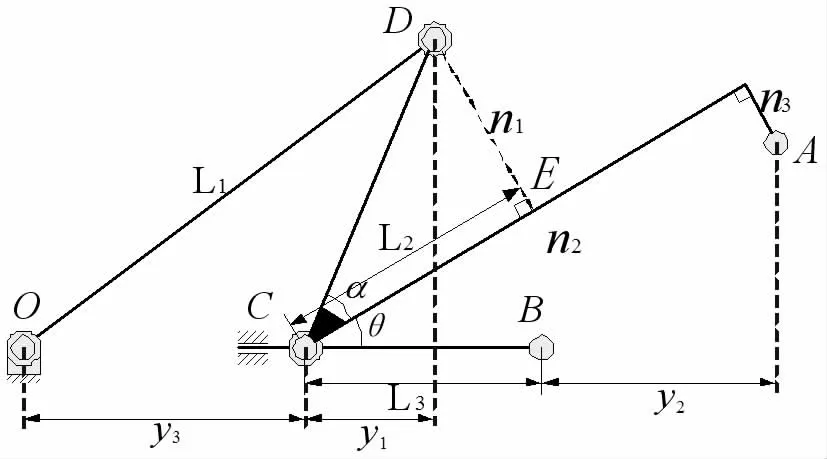
图3 采样头机构简化示意图
根据总体布局设计,这里确定n1=22.5,n2=61.5,n3=4.5;由运动分析可知,决定该机构运动规律的几何参数有连杆OD 长度L1,连杆CE 长度L2以及连杆CB 长度L3。因此采样头机构的独立设计参数共三个,故设计变量定义为

为了保证采样头在采样时能顺利触发闭合,需要保证采样头在死点位置时,A 点和B 点之间的是水平距离(y2=0)为零时,C 点和D 点之间的水平距离(y1)最大。以此建立目标函数,表达式为

(3)确定约束条件。
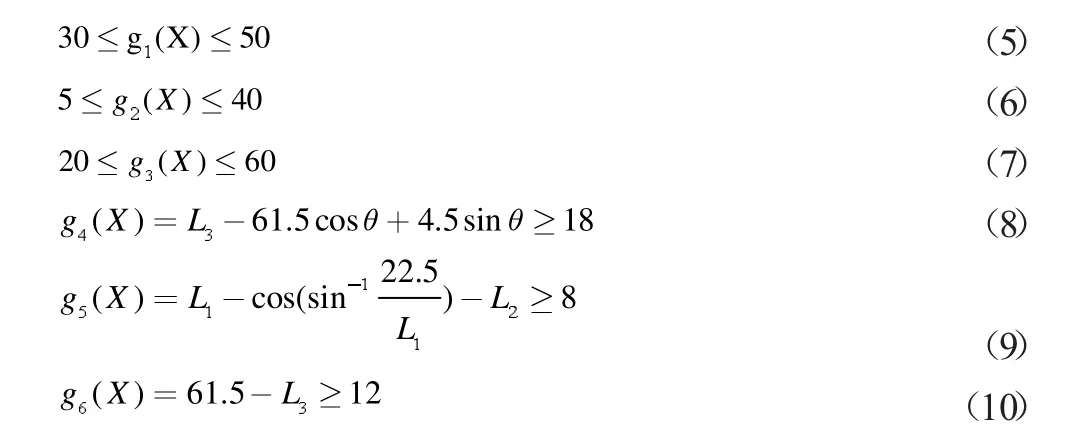
在考虑结构尺寸时,就要满足采样头体积适中,又能保证能够抓取足够多的样品;因此:30≤L1≤50,5≤L2≤40,20≤L3≤60。
同时要保证采样头机构在死点位置(y1=0)时,能顺利触发关闭采样头,A 点与B 点的水平距离(y0)要大于18mm;采样头在关闭状态(θ=0)时,要保证采样头的内腔有足够的空间来保存样品,所以触发杆的长度要短些,A 点和B 点之间的是水平距离大于等于12mm;同时也要保证OC 之间的距离(y3)不能太小,这里设计最小为8mm。
综上所述,采样头优化的约束条件为
利用MATLAB 进行优化,为了判断该稳定状态下对于各个连杆的变化关系,取L1=40,计算y1,可得目标函数随L2,L3的增大而增大,在可行域内不是凸函数。
寻得范围内最优解为:L1=50.0,L2=38.6,L3=43.2。考虑到加工误差的原因,故最终方案取值为L1=50.0,L2=38.5,L3=43.2。
根据采样头机构优化的结果进行尺寸设计,得到采样头两种状态下的尺寸参数如下图所示:
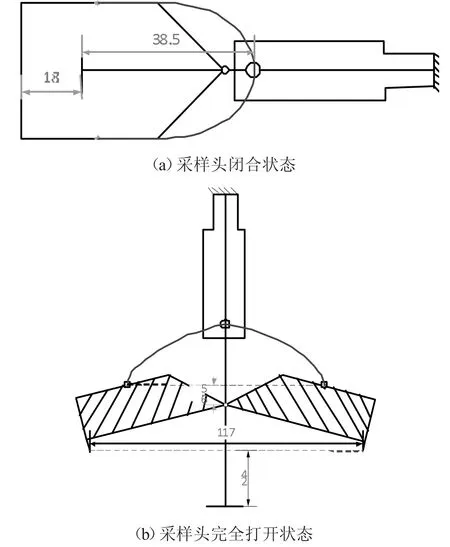
图4 采样两种状态
由图4(a)可得,该种状态下触发杆与舱内顶部的最小距离为18mm。因而,在采样腔中间位置可以适应的样品尺寸不能大于18mm。该种情况下触发杆伸出采样舱连线面15mm,也就说明采样头对于“凹地形”其中凹陷位置小于15mm 即可产生有效的触发。
4 采样头机构运动学分析
使用ADAMS 进行运动学仿真,模拟采样头触发闭合的过程。触发力的模拟采用step 函数,触发力随时间的变化逐渐增大。触发力在0-1s 内由0 变为10N。以腔门的速度为标准,当采样头腔门的由零增大时,则认为触发采样头闭合。从图5 可以看出舱门在0.638s 时开始变化,此时的触发力约为7N;即在弹簧刚度k=2.725Nmm/°的情况下,触发力F=7N。
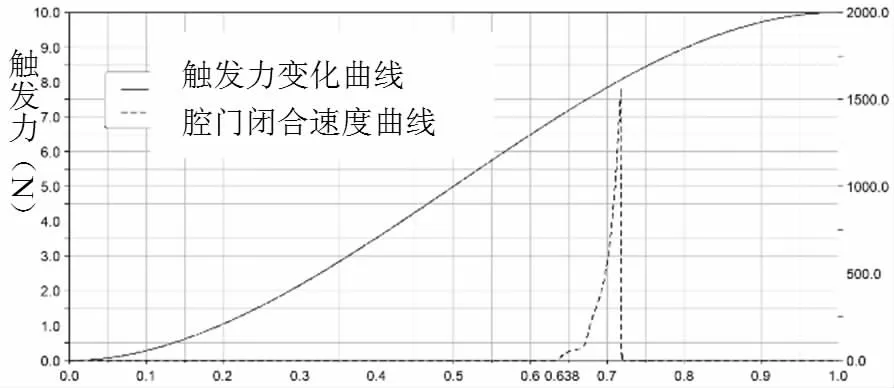
图5 触发采样头闭合曲线
验证得到的触发力是否正确,依然使用step 函数,在0s 时触发力为7N,并随时间而逐渐减小。设置仿真时间1s,步数1000。得到了采样头腔门的速度的变化曲线,如图6。可以得出腔门在0.1s 时的速度变为0,即认为腔门在此时闭合。由于采样头搭载的飞行器采用TAG 的飞行方式,触碰星壤的时间极短,通过仿真可以看出腔门的关闭时间约为0.1s,满足在3 秒的时间内完成采样操作。
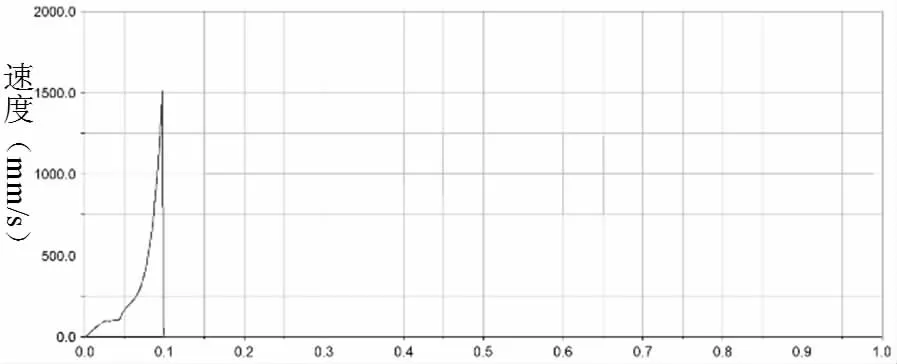
图6 采样头腔门闭合时速度变化曲线
5 结论
设计出了一种抓取式采样头,具有结构简单,采存一体的特点。从理论上来说,优化的采样头的两种状态稳定,而且触发方案可行,能适应一定程度的凹地形,且采样颗粒较大。通过ADAMS 仿真分析可以得出,采样头触发力小,仅7N;且闭合时间为0.1s,闭合迅速,符合卫星提供的触发力和采集时间。



