宁晨* 邓梁 王鑫
(1、南京师范大学 计算机与电子信息学院,江苏 南京210023 2、河海大学 计算机与信息学院,江苏 南京211100)
1 概述
遥感技术是在遥感平台上通过传感器获取地表的光谱信息,并利用计算机分析处理的技术[1]。在遥感图像中,飞机作为一种特殊目标,在民用领域和军事领域中都发挥着重要作用[2]。在现代战争中,为了取得空中优势,既快又准的检测识别出敌军飞机目标的动态信息就显得必不可少。在民用领域,飞机目标实时检测可作为分析客流量的依据。因此,针对飞机的检测研究具有十分重要的意义。
2 提出的方法
本文算法的原理框图如图1 所示,考虑到时间成本以及精度需求,本文检测算法按照由粗到精的思路设计,分为预检测以及精确检测两个阶段。

图1 本文检测算法的原理框图
2.1 基于同心圆周滤波器的目标主轴检测
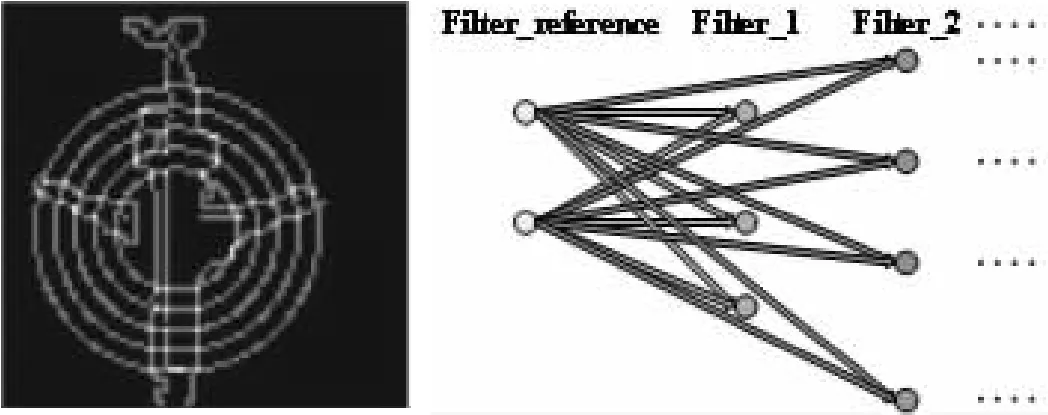
图2 同心圆周滤波器及相对坐标计算示意图
然后再计算出各同心圆上采样点相对于最内层圆的相对角度如图2(b)所示:
2.2 基于空洞卷积的目标检测框融合后处理
2.2.1 空洞卷积
空洞卷积与一般卷积的区别主要在于卷积核中注入空洞,这种结构就能在不使用池化层的情况下,增大单位像素的感受野。因为不使用下采样,所以这种结构能有效的弥补信息损失的缺点。二维空间上的空洞卷积可定义如下:

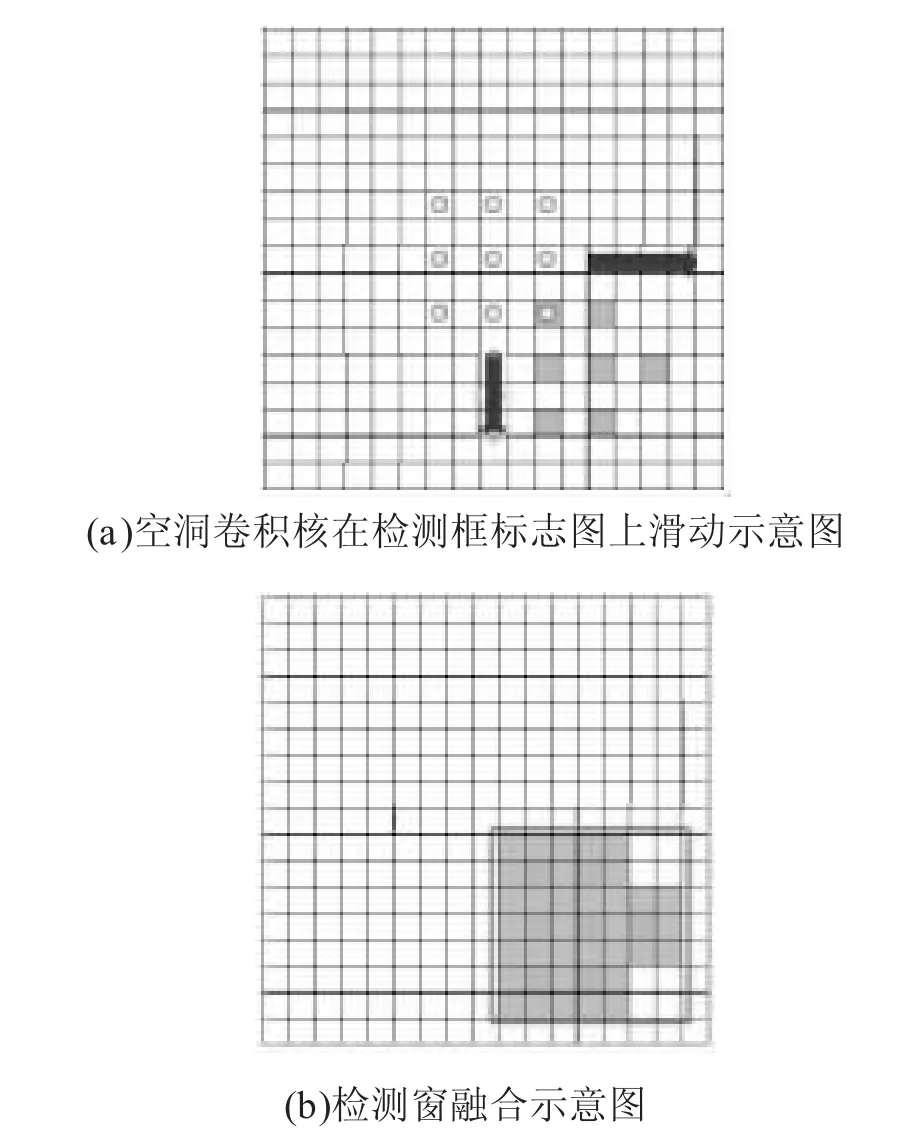
图3 检测窗的空洞卷积和融合示意图
图3(a)所示为空洞卷积核以横纵两个方向逐步对检测框标志进行卷积,如此即可计算得到卷积结果。如果局部图像中,检测框大多围绕一个目标,只是互相之间略有点偏移,那幺此时只需要对空洞卷积的结果进行一个局部最大池化即可找到局部检测框融合的中心,如图3(b)将参与运算的检测框标志所代表的检测区域展开,全部融合即可获得检测框融合以后的检测区域。
3 实验与分析
3.1 实验参数设置
本实验基于DOTA 数据集来验证算法的有效性。对每一幅待处理遥感图像,实验中挑选三种nbins 分别为7、8、11 的非局部自相似HOG 特征作为分类特征(块大小选定40×40,块步伐20,单元格大小4×4,单元格步伐2,相似向量取20 个)。这三种特征将直接输入多任务框架下的联合稀疏分类器,作为三个不同任务进行融合处理,最终由决策层得出综合判决结果。
3.2 结果与分析
我们分别给出两种场景下本文检测算法的检测结果,如图4 所示。可以看出本文算法可以很好地对遥感图像中的飞机目标进行精确检测。同时,表1 给出本文检测算法与Faster-RCNN等多种目标检测算法的性能比较结果。表中分别给出目标检测的三个参数:召回率、精度和综合评价指标(F1-Measure),其中,综合评价指标是召回率和精度的调和均值,反应目标检测算法的总体性能。在本文检测算法中,同心圆周滤波器对受检目标进行旋转,从而使之与训练样本角度靠近,在二次检测中提升召回率,从而最终提高的综合评价指标F1 度量值等性能。根据表中与其他目标检测算法的比较,可看出本文算法的优异性能。

图4 本文目标检测算法的检测效果图
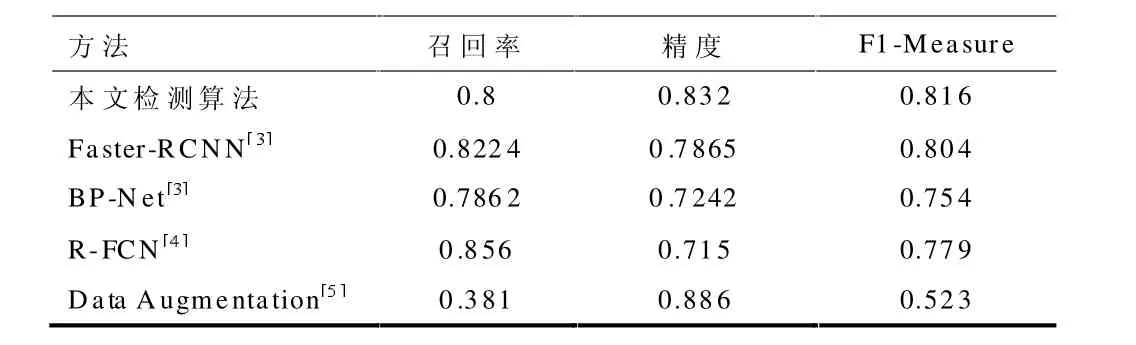
表1 目标检测结果比较
4 结论
本文提出一种基于同心圆周滤波器与联合稀疏的遥感飞机检测识别算法,该算法分为预检测与精确检测两个部分。预检测阶段首先通过改进FastMBD 显着性检测算法取得候选区域,减少算法整体时间复杂度,然后结合非局部自相似HOG 特征与联合稀疏分类器作进一步识别,从而提升算法精度。精确检测阶段主要通过同心圆周滤波器进行主轴检测,使得候选目标与训练目标具备共线角度,再利用联合稀疏分类器对漏检目标进行二次检测,提高召回率。最终在进行检测框融合处理后,即可成功检测出光学遥感图像上的飞机目标。



