李佳慧 张秀华*
(东北大学 理学院,辽宁 沈阳 110000)
1 概述
切换模糊系统是一类重要的混杂系统,它是将模糊系统和切换系统结合起来的控制系统。
目前,对切换模糊系统已经有了一定的研究。如文献[1]探讨了切换线性系统的H∞控制、切换时滞系统的H∞控制以及参数不确定性切换系统的鲁棒H∞控制等[1]。文献[2]探讨了线性切换系统的H∞可靠鲁棒反馈镇定问题[2]。文献[3]研究了不确定时滞非线性混沌的鲁棒容错控制问题[3]。文献[4]研究了具有松弛条件的一类切换模糊系统的稳定性[4]。文献[5]针对一类基于T-S模型的时滞切换模糊系统,进行了此系统的系统稳定性分析与鲁棒控制问题的研究[5]。文献[6]研究了一类具有参数不确定的模糊脉冲切换系统在任意的切换下的H∞控制问题[6]。文献[7]通过两种不同的方法对一类基于网络的切换模糊系统的镇定问题和H∞控制问题进行了研究[7]。
本文用T-S 模糊模型,研究了一类带有非线性、不确定项和时滞的切换模糊系统的鲁棒容错控制问题[8]。
原文中对偷鸡的描写用了“go late”“raise coop and all”,给人一种教人们步骤方法去偷鸡的滑稽感,我们发现,译文用“深夜里去掏鸡笼”则从情景渲染的角度表现其大大方方地描述如何偷偷摸摸地做坏事。“掏”这个动作在汉语中也多用于贬义,比如看到别人钱包被偷了,我们会说“你的钱包被人掏了”。因此,这个词用得十分传神和恰到好处,这就是表象(教授养鸡秘诀)与内涵(讽刺偷鸡的败坏行为)的矛盾冲突,也是要达到反讽修辞的必然要求,译文在这里就做到了修辞效果的对等。
2 问题描述
考虑如下切换模糊系统:
其中,x(t)∈Rn为状态变量;M1σ1…,M1σp代表第σ 个切换子系统中的模糊集;RIσ代表第σ 个切换子系统中的第l 条模糊规则;uσ(t)代表第σ 个切换子系统的输入量;fσ是非线性函数;Aσ1,Bσ1,Cσ1及Dσ1是第σ 个切换子系统中的具有适当维数的已知常数矩阵[11];ΔAσ1是矩阵函数,代表第σ 个切换子系统中时变不确定参数;d>0 是时滞常数[9]。这里的切换信号σ=i=σ(x(t))(i=1,2,…,Ni)。
第五,每篇开场白中都有一定数量的话题与己方措施的不足之处相关,目的在于预测反方将要反驳的论点并进行要点性的与反驳。Yoni Cohen-Idov用一个话题说明监控录像有协助抓捕罪犯的功能,但是,他又通过另外三个话题说明既然监控录像有这种功能的话,政府可以允许店铺或财产持有人监控自己的财产。而允许财产持有人运用录像监控的前提条件是录像资料只能用于追踪犯罪记录。Yoni Cohen-Idov还用另外一个话题说明每个国家都有可能爆发暴力冲突,录像监控有防止暴乱和抓捕暴乱分子的功能,但是,他又同时说明这样的功能有限而且是缺乏合理性的。
对于第i 个切换子系统:
其中,Eil和Dil是具有适当维数的已知常数实矩阵;Mil是未知时变矩阵,且满足
引理1[10]给定适当维数的常值矩阵X 和Y,则对于任意的常数ε>0,有如下的不等式成立:
“人工智能的法律人格”问题也可以类似的思路看待。如果我们承认人工智能的“近人”性,并因此将其纳入“人”的视角而观照之,那人工智能的法律人格问题也可以理解为:人工智能在本质上具有法律人格,只不过到“类人”阶段,人工智能的法律人格才表现得难以否认或接近完全,在此之前,其法律人格则较少体现出来或需受限制—在某种程度上,这和未成年人的法律人格问题有相似之处。“人工智能的法律人格”问题的新颖性,只在于人工智能的法律人格表现存在明显的阶段性差异—特别是在“类人”阶段之前被掩盖在了工具性之下;而人工智能本质上的有无,在人工智能的“近人性”中其实已被决定。
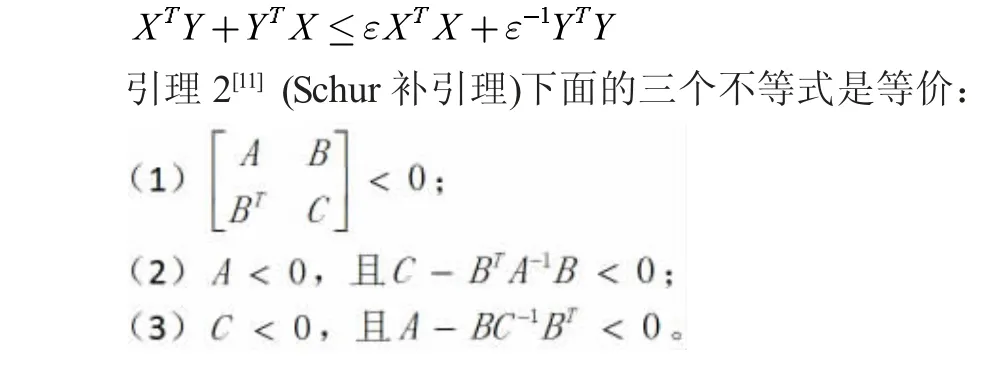
3 主要结果
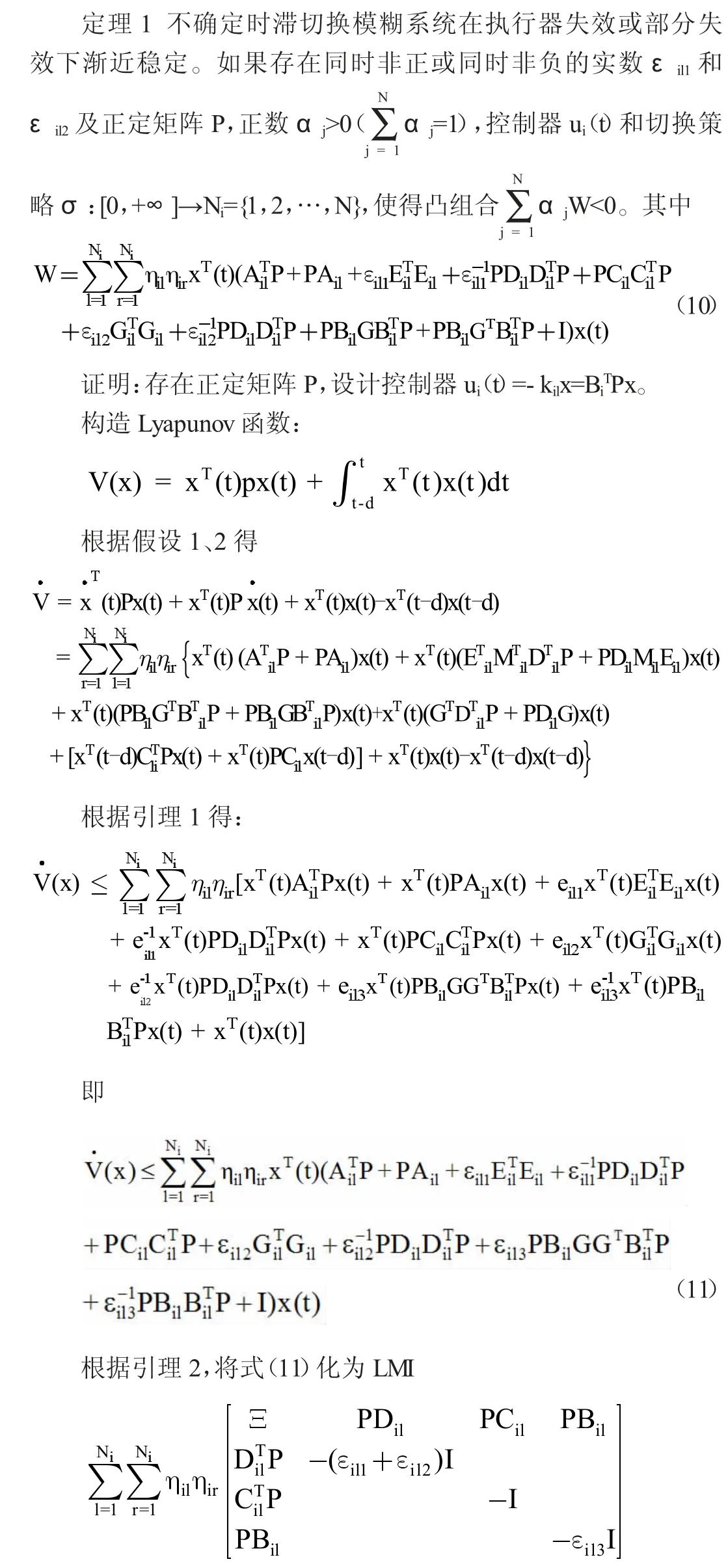

其中综上可得V(x)<0,因此系统(2)是渐近稳定的。



