刘竞一* 许 伟 姚山鸽 刘金伟
(重庆电子工程职业学院 智能制造与汽车学院,重庆 401331)
随着电动轮椅在控制和安全方面的技术进步, 电动轮椅已普遍成为老年人或残障人士的代步工具。通常,一般的电动轮椅只具备在平地上运动的能力,而不具备越障、爬梯等功能。基于此,设计了一种新型轮-履复合电动爬梯轮椅,利用虚拟现实技术验证其爬梯的运动过程及安全性能。虚拟现实技术简称VR 技术,将VR 技术应用于机械设计,使用VR 软件构建虚拟现实的环境,采用三维的、动态的形式模拟产品的各构件,分析其运动模式,使观看者可以更加深入和全面地了解并体验产品。
1 爬梯轮椅模型设计
文章使用CATIA 软件对爬梯轮椅进行三维实体建模,对各个机构进行装配。
1.1 轮椅爬梯运动轨迹分析
履带式电动爬楼梯轮椅为曲线的运动轨迹,且由不同斜度的直线、不同方向的圆弧互相拟合而成的轨迹。对轮椅的轨迹规划方法做出如下假设,以简化运动过程的分析。
1.1.1 根据我国《建筑楼梯模数协调标准》标准,设置楼梯模型高度为150mm,宽度为320mm。
1.1.2 将轮椅上、下梯过程看成在二维平面上运动。由于轮椅基本上是一个左右对称的结构,因此轮椅上、下梯时不会出现侧向滑动,假设轮椅不转向爬梯,而只沿楼梯坡度方向运动。
1.1.3 在假设轮胎、楼梯、地面为刚体的前提下,履带与楼梯接触时,处于纯滑动状态。驱动轮与地面接触时,没有滑移,仅发生滚动。
1.1.4 履带三角形模型的建立。三角形履带上有三个旋转轮,其中前部顶端的旋转轮是主驱动轮。因此,对此驱动轮进行运动分析。但轮椅的升降机构以及调平机构、履带等对其重心有所影响,因此,将驱动轮的位置假设在轮椅重心处进行运动学分析。同时,由于是履带接触,驱动轮通过履带与楼梯接触,因此,在运动过程中,将运动状态定义为滑动状态进行受力分析。
1.2 轮椅结构设计
1.2.1 座椅调平机构结构设计。调平机构是我们设计的旋转滚动蜗杆装置。旋转滚动蜗杆装置与座椅通过三角定位销连接,可以根据用户需要进行拆卸。蜗杆被固定在基座上,蜗杆绕着蜗轮轴线旋转并同时在蜗轮上滚动,蜗杆旋转带着基座一起旋转,基座与座椅相连,从而调整座椅保持水平。
1.2.2 升降机构结构设计。升降机构采用了电动千斤顶。电动千斤顶在需要工作时,电机启动经过减速齿轮的减速增扭带动轴承旋转,轴承旋转来使千斤顶升高或降低。千斤顶还有过顶保护装置,达到限制高度就会自动停止,保护千斤顶超出轴承范围。
1.2.3 履带机构结构设计。履带是设计的三角履带。履带前部高于一节楼梯,方便履带爬楼梯。履带的环形链环采用橡胶材质,上下楼梯是避免了对楼梯造成损坏,也使履带具有一定的缓冲作用。履带机构拆卸后还可以装上储物箱用来搬运物品。
1.2.4 电动爬楼梯轮椅的整体装配结构。采用CATIA 软件进行三维模型设计。多功能电动爬梯轮椅分为两部分。轮椅部分,可以在地面自由行驶。含有调平机构、升降机构和履带机构的功能结构部分。两部分可以根据用户需要进行拆卸。多功能电动爬梯轮椅的三维模型如图1 所示。
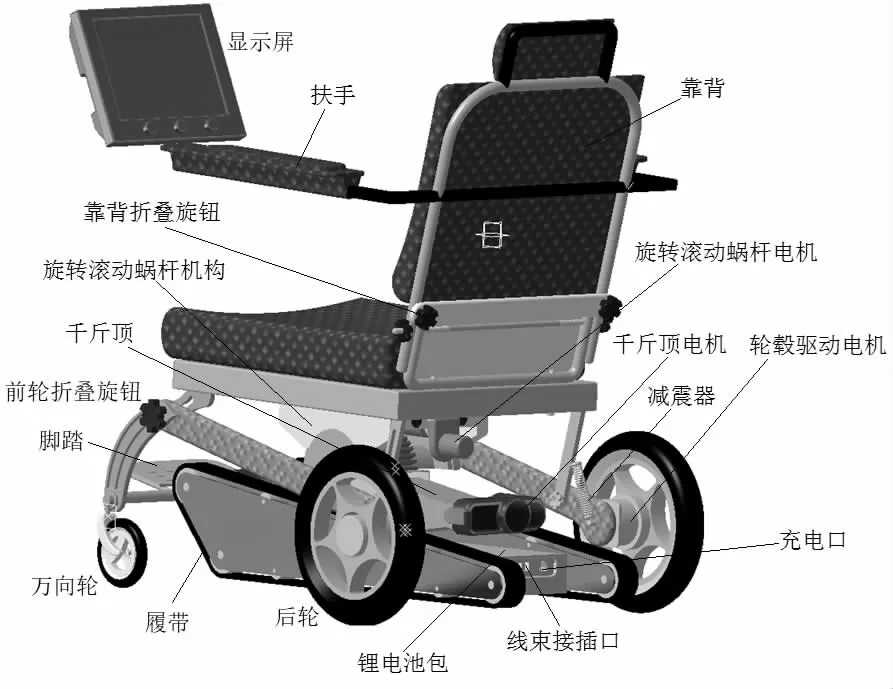
图1 多功能电动轮椅的整体结构三维模型
2 工作原理
2.1 平地行走
当轮椅在平地行走时,履带收起,等同于普通的电动轮椅地面上行驶。
2.2 轮椅爬梯
轮椅采用前向爬梯方式,升降机构将座椅整体稍微上顶,履带前部三角边接触梯棱,爬梯开始;陀螺仪传感器检测座椅俯仰角的变化,并将数据发给主控板,控制板控制电机进行角度补偿,此时旋转滚动蜗杆调平机构逐步调节座椅角度,使座椅保持水平使轮椅实现平稳安全上楼。爬梯过程中履带正向旋转,克服重力。
2.3 轮椅下梯
轮椅下梯时,采用前向下梯方式,千斤顶将座椅整体稍微上顶,使后轮离地即可;陀螺仪传感器检测座椅俯仰角的变化,并将数据发给主控板,控制板控制电机进行角度补偿,电动旋转滚动蜗杆机构使人体保持水平。下梯过程中履带逆向旋转,克服部分重力产生的下滑力,轮椅缓慢下梯。
2.4 辅助起身或坐下
升降机构会将轮椅抬升高度,调平机构会使座椅向前倾斜。让用户的双脚直接站立在地面上,用户不用再像做传统轮椅那样,起身的时候还需要腿部用力来使自己站立起来。更加方便省力,由电动升降机构(千斤顶)与电动旋转滚动蜗杆机构(如20 所示)共同实现;升降范围:120~420cm;座椅角度调节范围:- 60°~60°;辅助老人起身或坐下时身体前倾。
2.5 轮椅折叠
“履带+千斤顶+旋转滚动蜗杆”可整体便捷拆卸,从轮椅后部拉出,轮椅可折叠。
3 基于VR 技术的电动爬梯轮椅运动仿真分析
根据电动爬梯轮椅的功能设计和结构特点。主要分为四个运动过程分析其稳定性:一是履带脱离地面前,二是轮椅整体脱离地面的这一过程,三是轮椅沿阶梯斜向上运动的过程,四是轮椅由阶梯斜面向顶部平台的一个过渡过程。在上、下楼时,电动爬楼梯轮椅的速度是保持恒定的,且相对较低,没有考虑惯性力的影响。将CATIA 建立的轮椅模型分解为零部件,导入VR 软件EVRC 对其运动过程及稳定性做出仿真和分析。轮椅爬梯的场景模型在3DMAX 中建立并进行了渲染。
3.1 脱离地面之前
在电动爬楼梯轮椅没有离开地面之前有三个阶段:在第一个阶段时,轮椅的履带机构爬上了第一阶,如图2(a)所示。第二阶段,轮椅继续行驶,从第一阶爬向第二阶,如图2(b)所示,这一过程中爬楼梯轮椅不易发生翻倒问题,因为此时轮椅的翻转中心相对位置是固定不变的,在履带的上前部。第三阶段,轮椅跃上了第二阶,开始逐渐倾斜,其稳定性渐渐降低,如图2(c)所示。

图2 电动爬梯轮椅脱离地面前VR 运动仿真
3.2 脱离地面过程
当爬楼梯轮椅即将脱离地面时,其翻转中心发生了转移,从履带的驱动轮转移到了第一阶与履带的交点上,如图3 所示。突变的翻转中心将使得梯轮椅向前发生翻倒的危险性增加,轮椅爬梯过程的安全性和稳定性降低。
根据分析,图3 为轮椅稳定性最差的阶段。这时,轮椅的翻转中心处于第一级台阶与履带的交点处,此时由于翻转中心发生突变,轮椅最容易向后发生翻倒。要提升此刻轮椅行驶的安全性,需要增加履带运动的速度,即增加动力,以克服翻转中心的突然移动而带来的危险,此刻需要的动力应为最大。

图3 电动爬梯轮椅脱离地面过程VR 运动仿真
3.3 沿楼梯斜面向上运动。
此时,轮椅已经完全脱离了地面,沿着阶梯斜面向上运动。轮椅的翻转中心在此过程中相对保持稳定,一直处于履带与较低支撑台阶的交点处。图3 是一个临界点,之前轮椅还由地面支撑,之后轮椅完全脱离地面斜向上行驶。
接下来是一个较为稳定的爬梯过程。但此时轮椅的机械机构设计十分关键。履带机构接地部分的长度须两倍于阶梯斜面的长度,且设计有支撑杆,其座椅调节结构——千斤顶和旋转蜗杆机构可微调节座椅位置,尽可能使轮椅的重心较为后置,以保证轮椅在上、下梯过程中翻转中心位于重心之前,尽可能避免发生翻倒的问题。
3.4 由楼梯斜面向顶部平台过渡。
当履带机构的驱动轮越过最后一级台阶后,轮椅的翻转中心又发生了突变,转移到了最后一阶与履带的交点处,如图4(a)所示。此时,轮椅的稳定性又有所下降。这也是一个临界阶段。
此时,轮椅已经运动到阶梯斜面顶端,开始向最后一级阶梯的平台过渡,轮椅的重心已经移动至平台上。轮椅在辅助支撑杆的作用下,平稳降落到顶部平台,如图4(b)所示。在这一个阶段,轮椅的安全性和稳定性逐步增强,直至平地运动状态。

图4 轮椅由楼梯斜面向顶部平台过渡VR 运动仿真
3.5 下梯过程
在下楼梯过程中,履带机构较易出现向前翻倒的问题。由于轮椅前部具有辅助支撑杆,实现了轮椅由顶部平台向阶梯斜面的平稳过渡。轮椅在离开顶部平台沿阶梯斜面向下运动回至地面的这一过程,翻转中心和稳定性变化与上梯过程类似。



