王建
(四川省煤田地质局一三五队,四川 泸州 646000)
数字真正射影像(True Digital Ortho Map, TDOM)是基础测绘地理产品中重要的一部分,是基于高精度的数字表面模型(Digital Surface Map, DSM)生产而来,然而目前生产数字真正射影像工序繁琐,成果质量较差,不能满足现实需求。倾斜摄影是近年来发展起来的一项测绘新技术,随着无人机技术和相机集成技术的迅速发展,无人机倾斜摄影作业方式应用越来越广,比如:农村房地一体项目、美丽乡村项目、实景三维中国建设项目等。在实景三维中国建设项目中,需要生产TDOM成果,然而,直接基于建模成果得到的真正射成果,质量不高、视觉效果差,不能满足对高质量成果的要求。利用倾斜摄影数据,更换软件,重新进行空三加密,转刺控制点平差,然后生产TDOM,效率低,而且两次空三精度不一致,对后期成果套合可能会带来影响。鉴于此,将倾斜摄影空三成果能够直接使用,然后生产TDOM成果,不但可以减少人工干预工作,而且可以提高真正射影像成果质量,保证精度的统一性,便于后期不同格式成果数据的套合。本文从这点出发,先采用Context Capture(简称CC)软件对倾斜摄影数据进行空中三角测量解算,通过转刺控制点与平差,得到符合精度要求的空三加密成果,然后基于空三成果完成实景三维模型的生产。分析导出的xml 空三结构,利用C语言开发了空三转换软件,可以直接从xml 文件里提出参与运算影像的6 个外方位元素和相机参数,然后将该成果引入inpho软件中,完成后续TDOM 的生产。通过对比两种方式生产的TDOM,可以看出,采用本文的方法生产的TDOM 成果质量好,可以和倾斜模型成果准确套合,为生产高质量、高精度的TDOM提供了有效的方案。
1 数字真正射影像介绍
数字真正射影像是基于DSM 成果,利用数字微分纠正技术,通过对原始影像的几何变形进行改正,从而得到的影像成果[1-3]。其中,决定其成果质量的主要在于DSM的质量,决定其成果精度的主要在于空三质量。
2 倾斜摄影测量技术概述
倾斜摄影是指飞行器搭载多台影像传感器,同时从多个角度同步采集地表影像,获取丰富的地表影像信息,用于测绘产品的生产[4]。常见的是搭载五镜头相机进行影像采集,其中1 个下视镜头,4 个侧视镜头。下视镜头主要获取建构筑物顶部影像信息,侧视镜头主要获取建构筑物侧面纹理信息[5-6]。倾斜摄影较传统垂直摄影,减少了视角盲区,提升了影像信息,可以更好地获取地物信息。
3 真正射影像生产流程
采用倾斜摄影方式生产真正射影像,一般是生产完实景三维模型,紧接着基于模型获取真正射影像。本文主要基于空三获取影像的外方位元素,然后利用inpho 软件恢复空三,然后完成真正射影像的生产,具体流程如图1 所示。
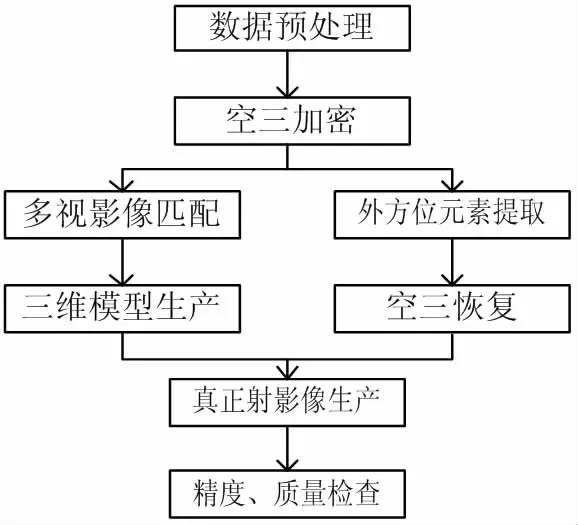
图1 基于倾斜摄影生产真正射影像流程
4 实例分析
本文以某地区实景三维中国项目为例,对整个作业流程进行详细介绍,并对成果进行比对分析。数据处理主要包括两种作业流程,一种是基于倾斜摄影生产真正射,主要包括数据预处理、空三加密、控制点转刺与平差、实景三维模型生产、真正射影像生产;另一种是基于倾斜空三,利用自主开发的软件,进行外方位元素的提取,然后恢复空三到inpho 软件中,利用inpho 进行真正射影像生产。
4.1 基于CC 软件生产真正射影像
4.1.1 数据预处理
数据预处理,主要是对影像数据、POS 数据和相机参数进行处理。影像数据处理,删除地面试拍影像,对色差大、亮度暗的影像进行匀光匀色处理,提升影像质量。对于POS 数据,结合平台检校参数,以下视镜头POS 为标准,对4 个侧视镜头POS 进行解算,得到精度较高的POS 数据,使影像和POS 能够对应,确保每张影像POS 是唯一的。对于相机参数,本次采用的无人机,相机参数不精确,为了确保后续空三能够准确解算,提升空三解算成功率,采用少量照片进行数据解算,得到精度较高的相机参数。
4.1.2 空三加密
空三解算是倾斜摄影测量的核心步骤,也是最容易出问题的环节。本次在倾斜摄影数据解算时,采用了CC 软件,并使用数据预处理后的参数,采用集群作业方式进行空三解算。空三解算完成后,通过人机交互方式查看空三成果,无分层、无弯曲,空三报告中重投影中误差为0.39 个像素,符合规范要求,空三成果可用。
4.1.3 控制点转刺与平差
由于POS 精度无法满足项目需求,因此需要通过控制点来对空三成果进行平差调整。首先整理外业提供的控制点成果,并将其引入软件中,对四角和中心位置的控制点进行转刺,然后进行平差。最后对剩余控制点进行转刺并平差,待平差完成后,对平差报告进行查看。平差报告显示,本次控制点平面中误差为0.002 米,高程中误差为0.001 米,成果精度满足规范要求。为了确保空三成果的可靠性,将随机获取的检查点引入空三中进行检查空三精度,通过点位转刺和设置检查点类型,再次进行平差。平差报告显示,所有检查点精度均满足规范要求,空三成果可靠。
4.1.4 实景三维模型生产
结合所有作业电脑的配置情况,本次在数据生产时,设置的瓦片大小为100 米,瓦片划分按照X 方向和Y 方进行,由于要和其他作业单位进行数据汇总接边,因此对瓦片分块原点和模型原点均进行了设置,确保成果可用。
4.1.5 真正射影像生产
基于倾斜成果生产真正射影像的软件目前有很多,比如超图、SV365、TSD、模方等,本次是直接使用CC 软件进行真正射影像的生产,设置成果分辨率为0.02 米,输出多个分块成果,然后使用易拼图(EPT)软件进行拼接,最后按照要求进行分幅处理。
4.2 基于inpho 软件生产真正射影像
4.2.1 数据准备
数据准备主要包括下视镜头的畸变改正影像,平差后的相机参数和影像的外方位元素。
4.2.2 外方位元素提取
本次测试,使用C 语言开发的空三转换软件进行外方位元素的提取。首先在CC 软件中,删除侧视镜头的影像,只留下下视镜头的影像,然后导出控制点对应坐标系下的XML 文件,顺带导出畸变改正后的影像,其格式为JPG。最后利用空三转换软件进行外方位元素的提取,转换界面如图2 所示,提取出来的部分外方位元素如图3 所示。

图2 外方位元素提取示意图

图3 部分外方位元素示意图
4.2.3 空三恢复
将提取出来的外方位元素和畸变改正影像加载到inpho 软件中,进行影像金字塔创建。然后采用人机交互的方式检查控制点点位,通过检查可知,控制点点位在CC 和inpho 软件中完全一致,说明空三恢复成功,精度无损失。如图4 是控制点点位在CC 软件中的点位,图5 是在inpho 软件中恢复后的点位。

图4 CC 软件中控制点点位

图5 inpho 软件中控制点点位
4.2.4 真正射影像生产
恢复并检查完空三成果后,按照inpho 软件操作流程,生产高精度的DSM成果,设置单张分辨率为0.02 米,自动完成单张影像的纠正和最终成果的镶嵌。
4.3 真正射影像成果对比分析
本次对比主要从影像的质量和精度方面入手,如图6 所示,是基于实景三维模型生产的真正射影像成果,图7 是基于inpho软件生产的真正射影像成果。

图6 基于实景三维模型得到的TDOM

图7 基于inpho 软件得到的TDOM
通过图6 和图7 对比可以看出:基于三维模型生产的真正射影像成果质量一般,马赛克严重,建构筑物边缘虚化严重,地面不同地物边界模糊;基于inpho 软件生产的真正射影像成果质量高,建构筑物边缘合理,没虚化现象。
使用EPT 对真正射影像成果进行精度检测。首先打开EPT,新建图幅修补工程,然后导入检查点,通过双击定位的方式,对检查点点位进行确定,然后进行精度检测,检测完成后,直接导出检查报告。通过精度检测可以得出:基于实景三维模型生产的真正射影像平面中误差为0.051 米,通过inpho 生产的真正射影像平面中误差为0.053 米,精度相差不大,均满足1:500正射影像生产规范,成果可用。
通过在ArcGIS 里对两种方式生产的成果进行卷帘对比分析,可以看到相差较大的位置主要位于建构筑物边缘和地物边界,这主要是虚化问题引起的,其余部分套合情况良好。
5 结论
本文首先介绍了数字真正射影像和倾斜摄影技术,并对真正射影像生产流程进行了简单介绍。以实际项目为例,对两种方式生产真正射的详细流程进行了说明,并对两种方式得到的成果进行了对比分析,通过对比可知,采用CC 软件的空三成果,利用空三转换软件提取影像外方位元素和相机参数,将其恢复到inpho 软件中,可以得到质量高、精度高的真正射影像成果,为生产真正射影像提供了一套切实可行的方案,有助于提升真正射影像的成果质量。



