贾玉琳 李春娟
(南京恩瑞特实业有限公司,江苏 南京 211106)
单脉冲技术是雷达提高测角精度的一种方法,通过和、差信号比幅或比相来获得更加精确测角,从而实现对目标更加精确的定位与跟踪[1]。单脉冲技术的主要原理,首先由天线对所接收的信号分别进行和差加权得到的对应的两个信号,然后这两个信号分别由两个一致性较好的接收通道实现信号放大,最后这个两个放大过的信号进行鉴相处理,得出偏轴指示,和差比值,从而完成一次单脉冲处理。然而放大链路中,模拟器件曲线差异和温度变化都会引起和差通道幅相的不一致,影响测角精度,严重时测角精度反而低于不采用单脉冲技术同类设备,因此对单脉冲接收机的和差一致性必须进行监测,当不一致时及时补偿。
目前补偿方式主要分为模拟方式和数字方式两类。模拟方式是在射频端插入衰减器和移相器,从而分别调节通道的衰减和相位[2-3]。移相器是通过在通道内并联或串联电抗器件来引入相移,然而移相器内部的电抗器件和传输线也会带来信号的部分衰减;同理,衰减器通常是电阻元件组成的,然而插入衰减器同时也会影响信号的相位。因此,如果同时补偿通道间的幅度和相位,需要不断优化衰减器和移相器的设置值,以达到一个期望的平衡,对硬件电路调试提出了很高的要求。而数字方式可分为基带补偿、中频补偿和射频补偿三类,实现方式相对灵活,且保证了幅相补偿精度。目前数字补偿大多是在中频或基带实现,中频补偿是数字接收机根据角误差计算值得到校准信号,反馈到接收通道的处理前端,由数字本振IP 核(Intellectual Property Core)根据校准相位值和幅度值调整相应参数,从而消除通道内的幅相不平衡[4];而基带补偿是由计算机或DSP(Digital Signal Processing,数字信号处理)计算补偿值,然后根据计算值在正交基带信号上进行补偿,以保持通道间幅相一致性[5-6]。
然而,目前的补偿方式都需要在系统运行前,先用测试信号求得不同环境下的各通道间补偿值并存储下来,然后在实际运行中根据实际使用情况(例如接收信号的频率、带宽和温度等)读取补偿值进行相应补偿,此方法增加了操作复杂度,且随着模拟器件老化,之前存储的补偿值不再完全适用,调节精度会进一步下降。针对上述情况,本文提出一种基于数字化接收机平台的和差单脉冲雷达幅相自动补偿技术,这种方式可根据不同使用环境进行实时补偿,简单易行,同时具有高补偿精度,为提高单脉冲雷达的处理性能提供良好的技术支持。
1 单脉冲工作原理
然而,在雷达实际工作中,多种原因会对和差通道信号的幅度和相位值产生影响。主要包括:虽然和差通道接收电路的组成框架相同,但通道内各个组件本身存在性能差异以及加工差异,导致和差通道信号的幅频响应产生有差别;雷达工作频率和带宽发生改变后,元器件对接收信号的幅相频响应发生改变;当外界温度变化时,接收通道模拟响应特性随之漂移等。
和差通道间幅相失配会引起天线方向图零点偏移,零值深度减小,从而产生测角误差[6]:和3π 2附近时,微小的偏移会导致较大的测角误差,因此必须进行幅相校正。
2 幅相补偿技术
2.1 实现框图
传统的幅相补偿方式是脱机进行的,即先确定雷达运行的环境,例如接收信号的频率和带宽、接收通道的硬件电路组成、接收通道的温度等,在此特定情况下,将相应校准信号输入到和差通道,信号处理端计算并存储补偿值,然后运行雷达,根据对应情况读取补偿值进行相应补偿。
然而,这种方式只能补偿实际中稳定且可测的系统误差,例如由于元器件的性能差异、加工差异产生的幅相频响应差异,以及接收通道对不同工作频率带宽的响应差异等。而例如外界温度变化导致的模拟器件性能漂移等随机误差没有稳定状态,很难在校准初期进行模拟和预判断。另外,模拟器件随着雷达运行时长的增加发生老化,之前存储的补偿值无法适配此时的工作状态,调节精度会进一步下降。如若更换接收通道内的组件模块,理论上需重新使用测试设备进行校准,操作繁琐。本文提出的一种和差单脉冲雷达中幅相自动补偿技术,通过在雷达系统内部增加实时校准电路,可在线进行幅相的实时补偿。
图1 是本文自动幅相补偿技术的原理框图,在雷达数字处理模块根据雷达工作状态生成相应的测试信号,在每个帧周期的空闲时期输出该信号,经上行模块的模拟测试通道进行放大滤波,得到幅相校准信号。将校准信号经过定向耦合器分别输入到和差两路下行通道,经过限幅、低噪放大以及模拟混频等处理到达数字处理模块,处理模块对两路信号分别进行数字下变频得到校准信号的基带IQ 数据,并根据该数据求得实时幅相补偿值。然后在此帧周期内发射实际激励信号,利用该幅相补偿值对从天线接收的回波信号进行幅相补偿。该方法能够对雷达系统进行实时补偿,补偿精度高,对系统内运行期间产生的随机误差也能较好的补偿。
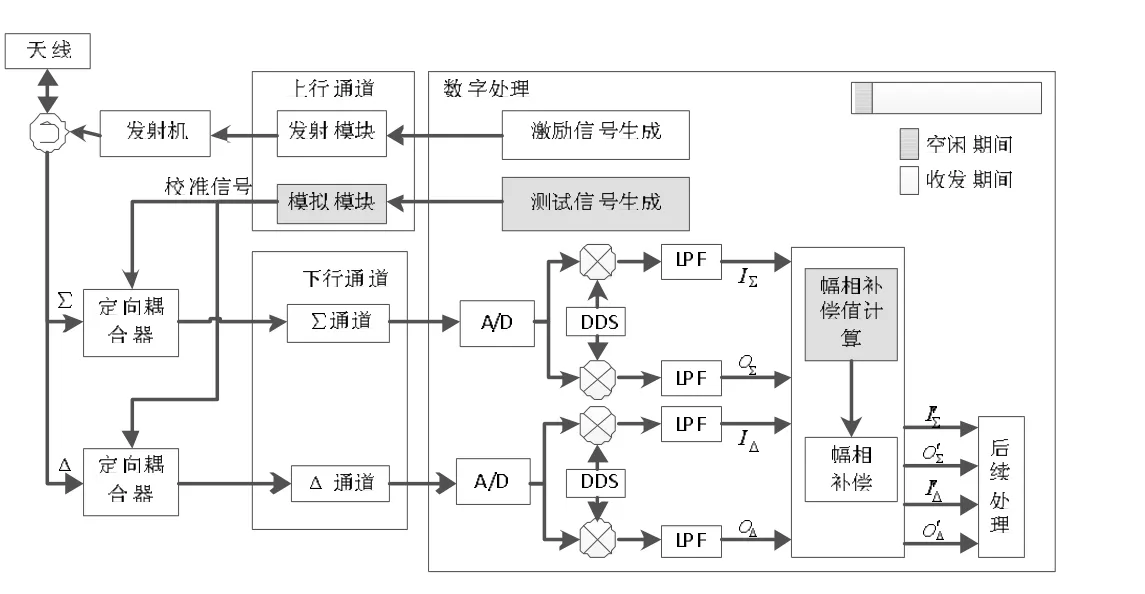
图1 幅相补偿原理框图
2.2 补偿模块
本文采用基带补偿方式,在FPGA(Field-programmable Gate Array,现场可编程门阵列)上对解调后的基带正交信号采用对应算法实现补偿。具体补偿如下:
假设和差通道信号正交解调输出分别是:
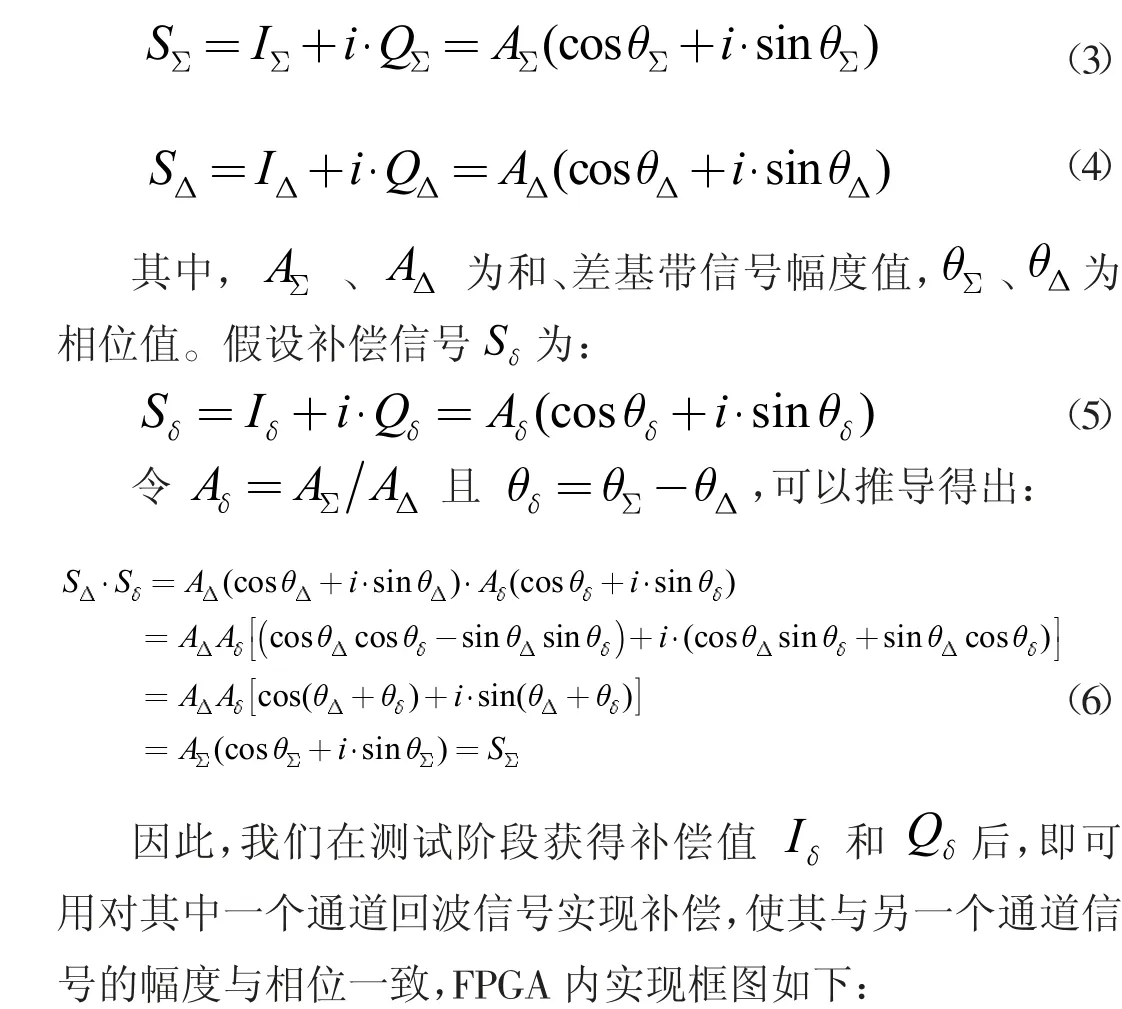
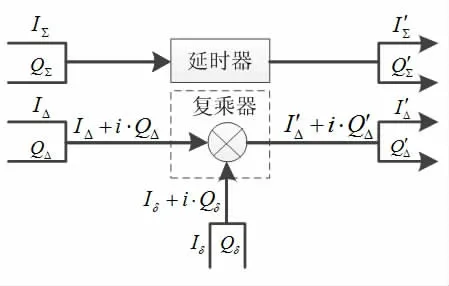
图2 补偿模块框图
本技术可在差通道上进行补偿,也可在和通道上进行补偿,处理方式类似。以在差通道补偿为例,将差通道的基带正交信号IΔ和QΔ与幅相补偿值Iδ和Qδ进行复数相乘,得到补偿后的差通道信号;同时,和通道的正交信号IΣ和QΣ需要在FPGA 内部进行相应的延迟,延迟值等于差通道补偿算法产生的延迟时间。将补偿后的和差通道进行鉴相处理,得出偏轴指示以及和差比值,结合天线的角码器方位值,综合获得目标的方位。
2.3 补偿值计算模块
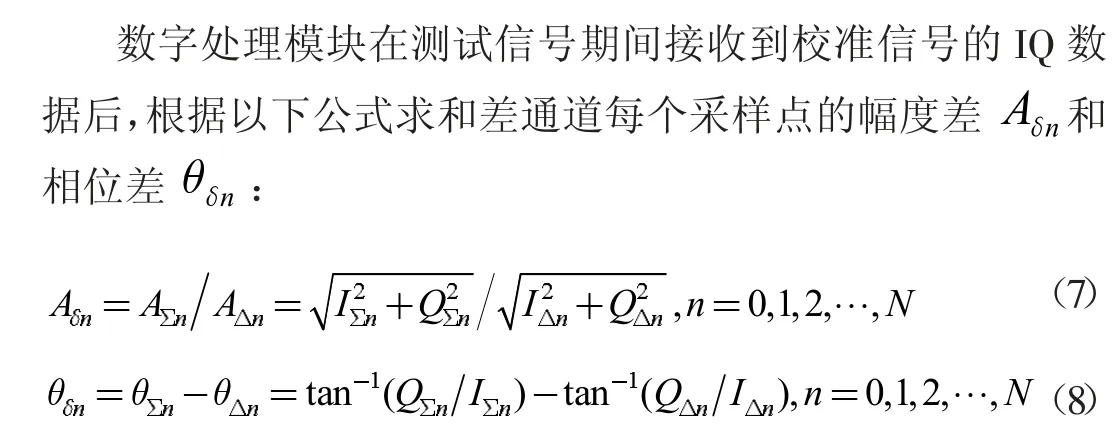
该模块幅相自动补偿算法由处理模块自动进行,无需人工干预,当雷达在空闲期间发送校准信号时,在数字处理模块在FPGA 内对校准信号完成正交解调和幅度相位补偿均值实时计算,然后在雷达实际收发期间,根据该补偿值对差通道数据进行补偿,以保证和差两个通道的幅相一致性。
3 应用实例
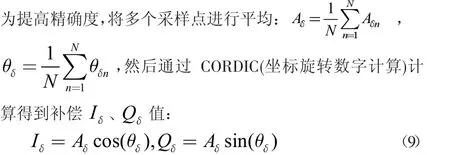
为验证本文的幅相自动补偿算法性能,本文采用Xilinx公司开发的Kintex-7 系列芯片实现上述幅相补偿功能模块。该系列芯片逻辑资源丰富,处理能力强大,能满足数字处理模块处理资源的需求。首先在Vivado 软件端验证本文中幅相补偿算法的可行性,从和差通道输入端输入不同幅度不同相位的1091MHz 正弦波脉冲信号,在数字处理端进行1090MHz 本振下变频后得到基带正交信号,sigmai_org、sigmaq_org 为和通道的IQ 值,deltai_org、deltaq_org 为差通道的IQ 值,从图3 可以看出,原始和通道信号幅度比差通道大,相位比差通道超前,因此原始的和差通道信号幅度和相位都不一致。
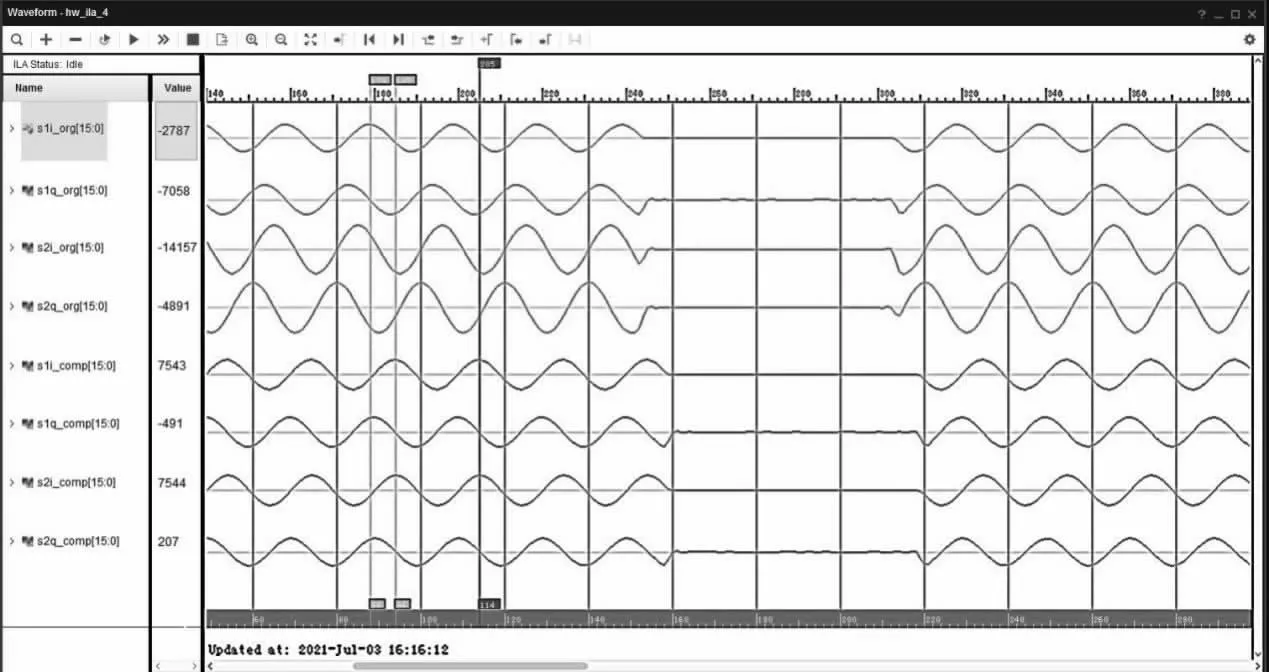
图3 Vivado 中幅相补偿波形图
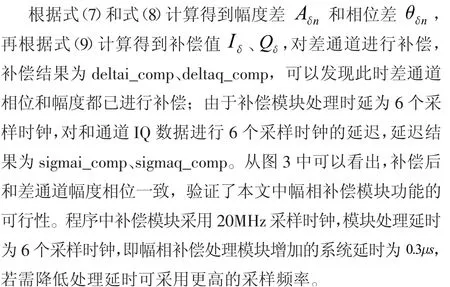
图4 是民航单脉冲二次雷达探测飞机时是否进行本文幅相补偿的对比图,浅色点表示目标回波信号来自于天线瞄准轴左测,黑色点表示目标回波信号来自于天线瞄准轴右侧。由数字处理模块产生1090MHz 的校准脉冲信号,经定向耦合器输入到和差两个通道,为了更加方便对比测试,在差通道串入与和通道不等相的电缆来模拟和差通道幅度相位的不平衡。由上图中可以看出,不进行补偿时,由于和差相位偏离,PPI 显示器上的回波点所对应的单脉冲偏轴指示不以目标位置对称,严重时甚至会只出现浅色。而进行自动幅相补偿后,可以直观看到回波眉毛以目标真实位置左右对称,表明进行本文幅相补偿的有效性。
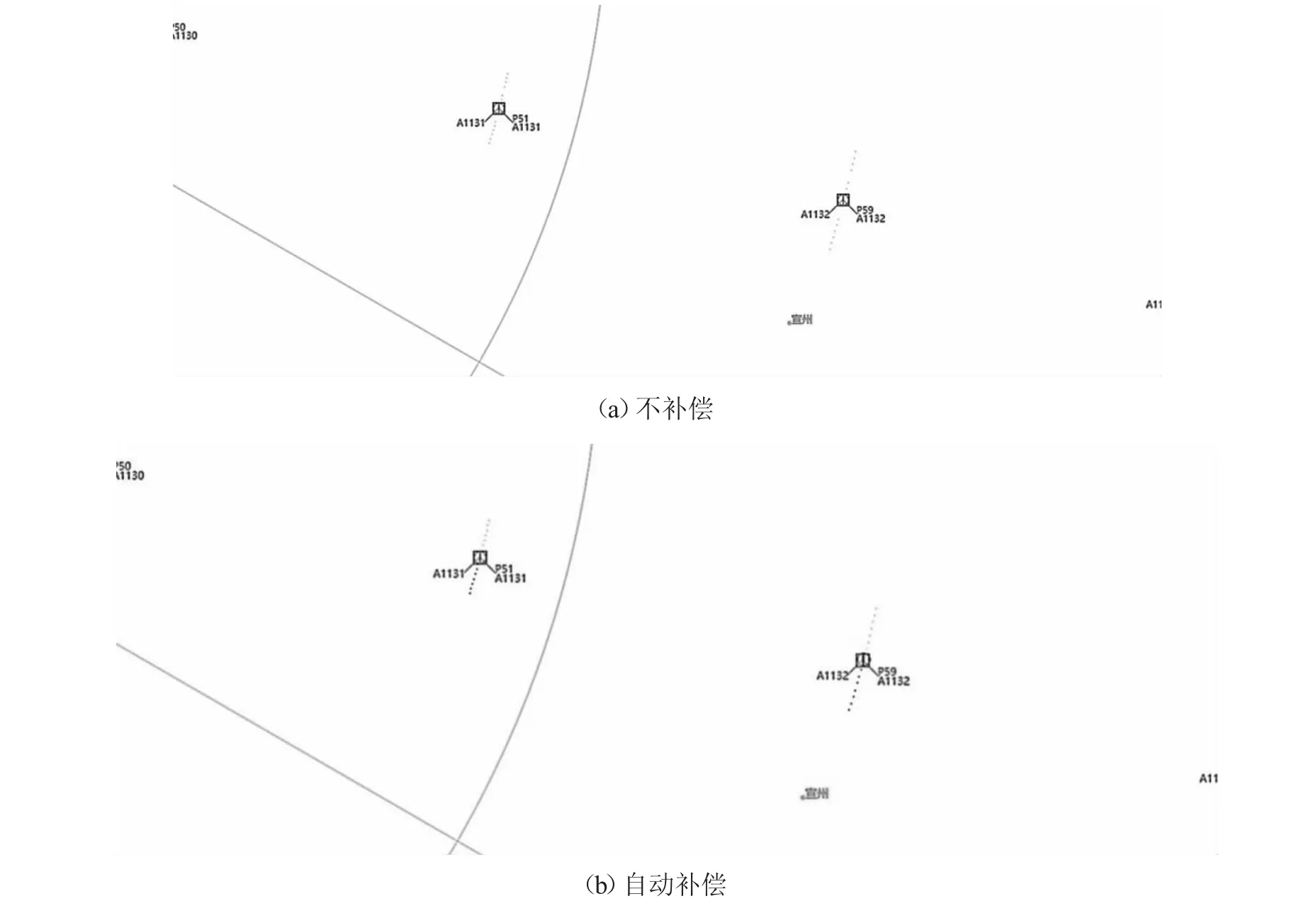
图4 目标探测结果图
结束语
本文介绍了一种单脉冲雷达中的幅相自动补偿技术,该技术可自动补偿和差通道的幅度和相位不平衡,确保实现单脉冲测角功能。在数字处理端采用在雷达空闲期间发送校准信号并计算补偿值,在收发期间使用复数乘法算法进行补偿,提高实现的灵活性与可扩展性。目前本文幅相自动补偿技术已成功运用到民航二次雷达设备中,能够对目标民航飞机的角度测量进行修正,满足对飞机测角高精度的要求。



