邹道磊 楚国天 代 杰
(1、菏泽市测绘院,山东 菏泽 274000 2、山东轨道交通勘察设计院,山东 济南 250000)
1 概述
城市建设快速发展,基坑开挖的深度增加及监测区域增大,为保证基坑施工建设安全以及基坑周边建筑物的安全,应加强基坑变形监测。在建筑物基坑边坡稳定性监测中,边坡的垂直位移监测采用精密二等水准测量,监测点的水平位移监测采用测量机器人测量方法[2-3]。在实际的建设工地现场,由于基坑周边建设护栏,现场环境复杂造成工作基点与基准点的通视较差,对基坑边坡监测造成很大的影响。本文基坑边坡水平位移监测方法采用全站仪测量机器人自由设站法进行监测。
2 测量机器人测量原理及误差分析
2.1 测量原理
全站仪测量机器人系统包括:电子测角、电子测距等系统。自动监测方式通过全站仪自动搜索识别和自动照准目标,从而获取监测点空间三维坐标。全站仪通过极坐标法进行测量,获取斜距及水平角和垂直角,计算得出三维坐标。
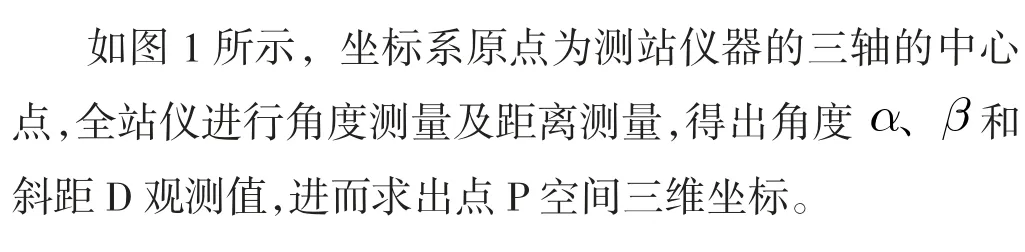
图1 全站仪测量原理

2.2 反射棱镜的误差影响
反射棱镜是一个直角三棱锥体。反射棱镜具有以下特性:入射光线和反射光线平行;不同反射路线其棱镜内部光程相等。不同的入射角对棱镜内光程有一定的影响。其光程会随着入射角变化而变化,其式(2)如下:
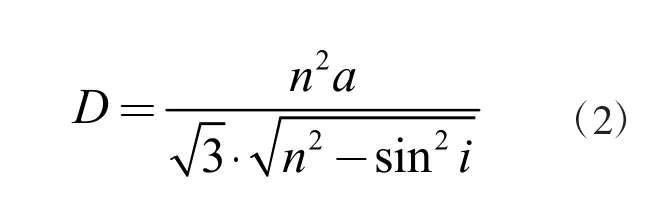
其光程D 变化量差值在的全站仪测距结果能体现出来。基坑监测中使用的棱镜其棱边边长a=75mm、棱镜折射率n=1.52,棱镜内光程D 随入射角i 的变化的关系如图2。
图2 光程值与入射角变化关系
根据入射角与光程差值变量关系,要使棱镜内光程变化差值小于1mm,光线入射角应小于150。当全站仪与监测点距离较短时,应增强反射棱镜的定向瞄准操作精度。
3 测量机器人定位精度分析
基于空间极坐标测量原理即可求定各监测点在该空间直角坐标系下的坐标,因测量机器人只进行边坡水平位移监测[4-5],垂直方向精度不再进行分析。对式(1)求偏导得出平面位置中误差
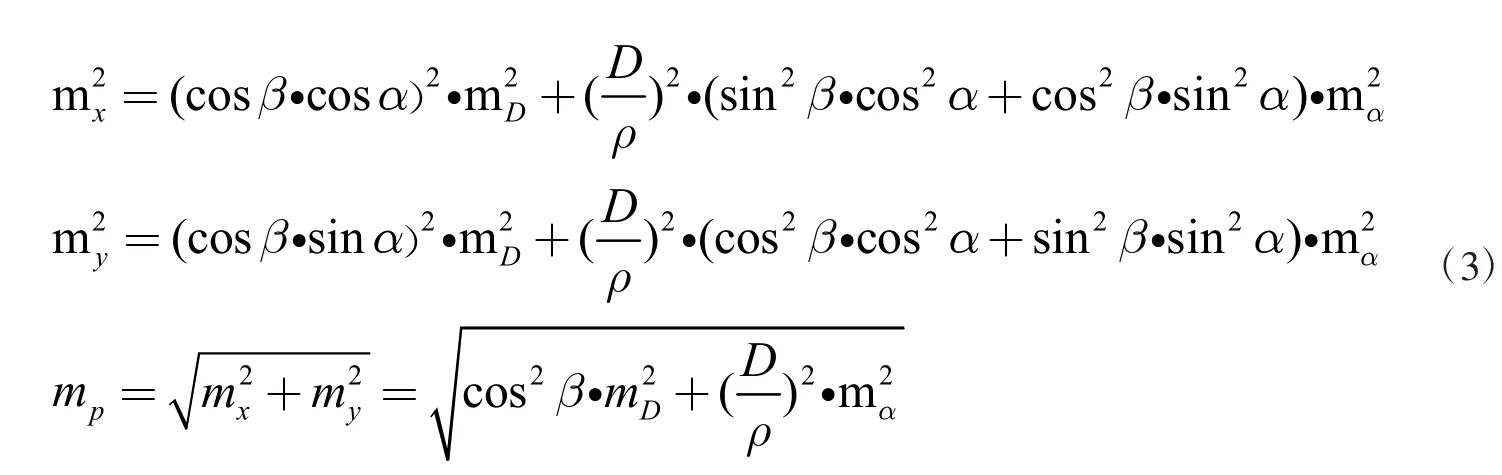
式中D 测站点到监测点斜距,β 为高度角,α 为目标点的方位角。拓普康MS05AXII 测量机器人的测角精度为0.5″,棱镜可达到工业级的0.6mm + 1ppm;反射片可达到0.5mm + 1ppm。根据现场监测点分布图显示监测区域内监测点的高度角都小于15°,在不考虑球气差的改正,根据式(3)得出监测点的中误差分布如图4 所示。
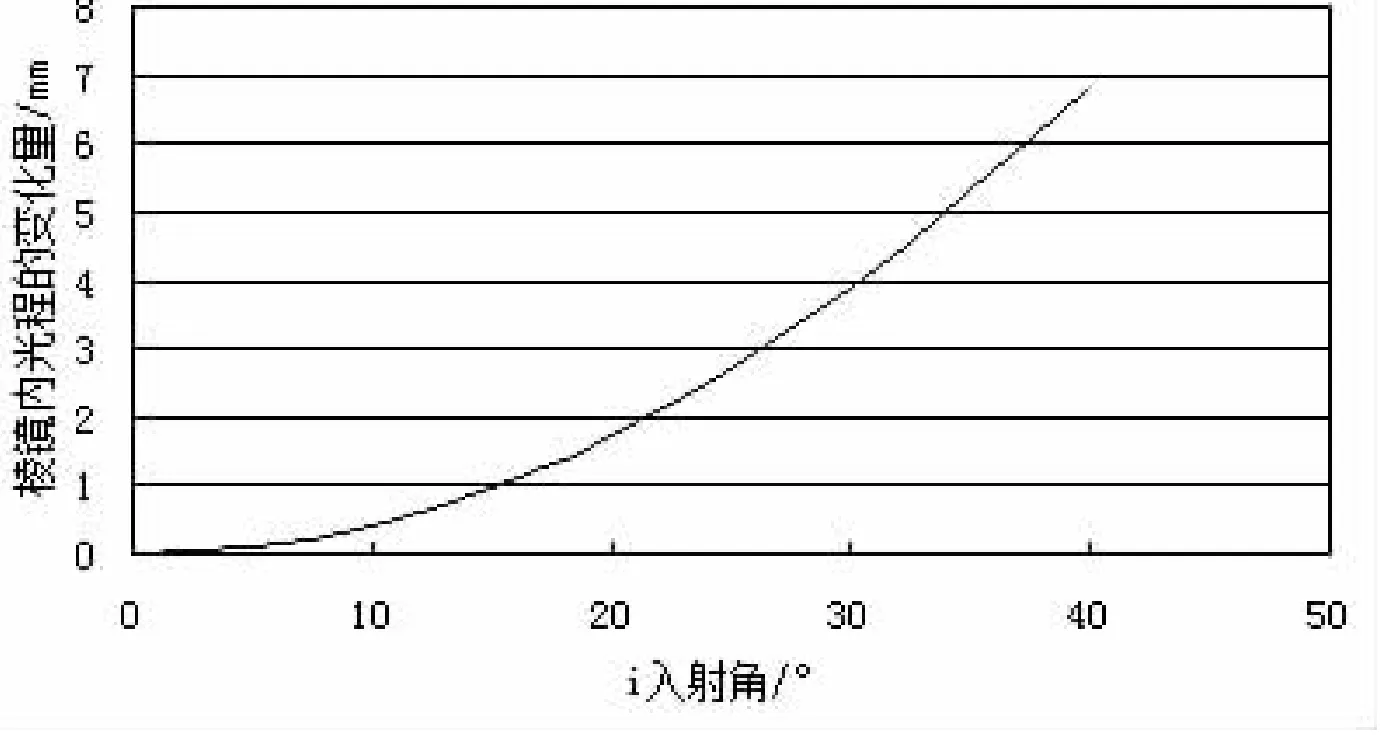
图3 入射角与光程差值的变量关系
根据基坑监测报警值(表1)所示,基坑的边坡桩锚、排桩支护段顶部水平位移累计报警值为35mm,变化速率报警值为4mm/d。根据基坑顶部的水平位移监测精度(表2)及水平监测预警值确定(表1)所示,此项目基坑监测点坐标中误差小等于1.5mm。
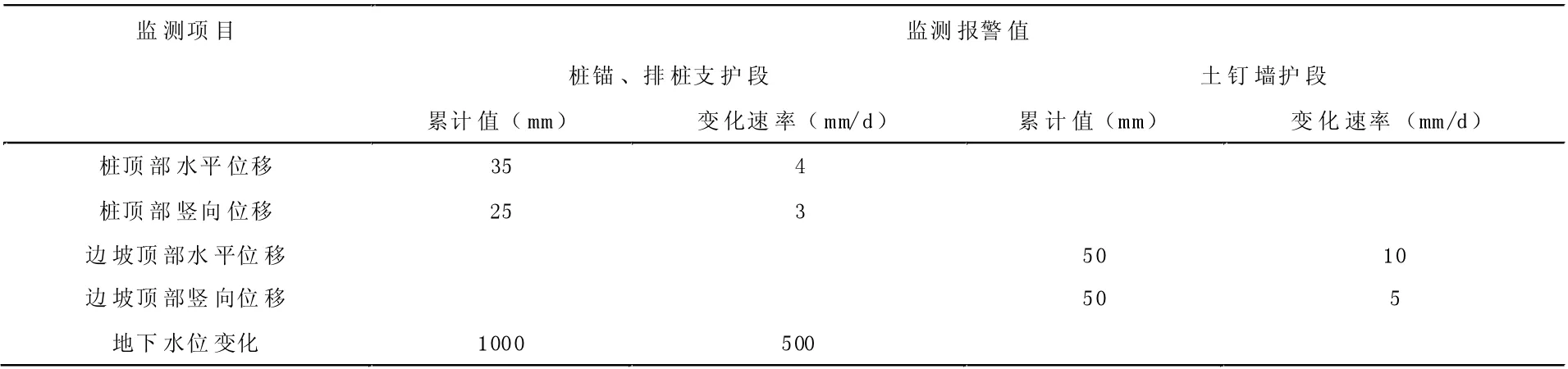
表1 基坑监测报警值

表2 水平位移监测精度要求
根据现场监测点分布图显示监测区域内监测点到工作基点的距离最大280m, 在不考虑在不考虑球气差的改正时,根据图4 得出监测点坐标观测最大坐标中误差为1.049mm,所以拓普康MS05AXII 高精度全站仪对监测点的观测精度满足于水平位移监测精度要求。
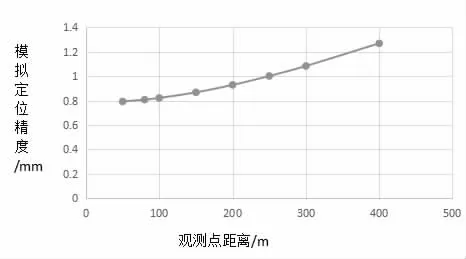
图4 监测点观测中误差曲线图
4 基坑监测与资料分析
在菏泽谋写字楼工程建筑物基坑工地,根据现场环境布置如图5 所示的后方交会控制网,其中A、B、C、D4 位基坑观测的平面基准点,平面控制点布设在施工场地附近的已有建筑物上,建筑物位于基坑影响以外。4 个控制点采用独立坐标系,用拓普康测量机器人以4 个测回进行自动观测,通过评查得出4个控制点的平面坐标,坐标取位至0.1mm。

图5 基坑监测点布设示意图
进行基坑观测时分别在M1、M2 位置自由设站安置测量机器人,自动观测4 个控制点和27 个监测点,每次检测都在微风光照照射较弱的条件下观测,每期数据进行独立自动观测3 次。
基坑监测周期为2021-3-10-2021-7-30,基坑开挖及支护、基础施工期间检测频率高,施工到达正负零以上,检测频率逐渐降低。监测点水平位移随时间的变化曲线如图6 所示。
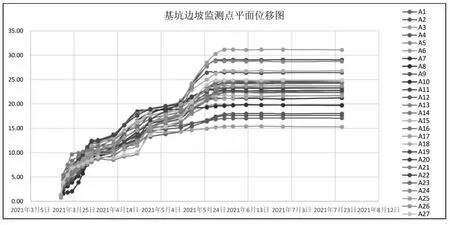
图6 基坑边坡监测点平面位移图
图6 中所示基坑监测点在基坑开挖及支护、基础施工期间水平位移量较大,施工到达正负零以上水平位移量不怎幺变化,最后几期监测水平位移趋于平稳。
5 结论
本文分析了通过拓普康MS05AXII 高精度全站仪自由设站及自动跟踪观测相结合的方法,所获得监测数据成果能够满足基坑边坡监测的精度要求。本文只是验证拓普康高精度全站仪边坡的水平位移监测,基坑监测点的沉降观测采用二等水准测量,通过全站仪自动化监测,节省了观测时间,并且监测成果具有了良好的可靠性。



