赵梓芬,田军委*
(西安工业大学机电工程学院,陕西西安 710021)
绝缘机器人主要用于对高空裸露高压线包覆绝缘材料,需要完成行走、供材、包覆等多重功能,随着系统集成化、信息化、智能化程度较高,系统间、部件间的联系和耦合更加紧密,任一关键部件或关键子系统运行故障都有可能影响设备正常运行,因此可靠性对于设备正常工作至关重要,对机器人健康状态进行综合评估对机器人运行的稳定性、高效性具有重要意义。主流评估方法有层次分析法、D-S 证据理论、马氏距离、熵权法、杰色关联法、隐马尔科夫、最小二乘支持向量机[1]等。本研究的作者结合改进的层次分析法与熵权法来得到综合权重,对于构建隶属度函数的问题,采用基于中心点型的白化权函数,完成底层指标及机器人整体的健康状态评估。
1 绝缘机器人健康状态评估体系建立
1.1 绝缘机器人健康状态评估方法
绝缘机器人由不同的分立系统构成,对于机器人这样一个信息不完全的系统,将其视为杰色系统,用分析和确定各因素间影响程度的分析方法来实现健康状态评估[2]。对于如何解决权重分配问题,采用层次分析法和熵权法组合的赋权法,层次分析法将决策问题分解为不同的层次结构,按照各层次中不同因素间的重要程度将评判因子转换成评判举证,获得合理权重[3];熵权法用熵值来判断各指标的离散程度,以此反映不同因素在评估过程中的权重[4]。这样的组合赋权可以同时反映主客观信息,使权重更科学合理。然后通过杰色聚类法和模糊综合评价法完成绝缘机器人的健康状态评估。
1.2 健康状态评估指标体系
为全面反映绝缘机器人健康状态,按功能模块将机器人分为提升子系统、成型加热子系统、行进子系统、切断子系统4 个可影响设备工作可靠性的子系统。分析影响健康状态的指标,建立指标体系见图1。
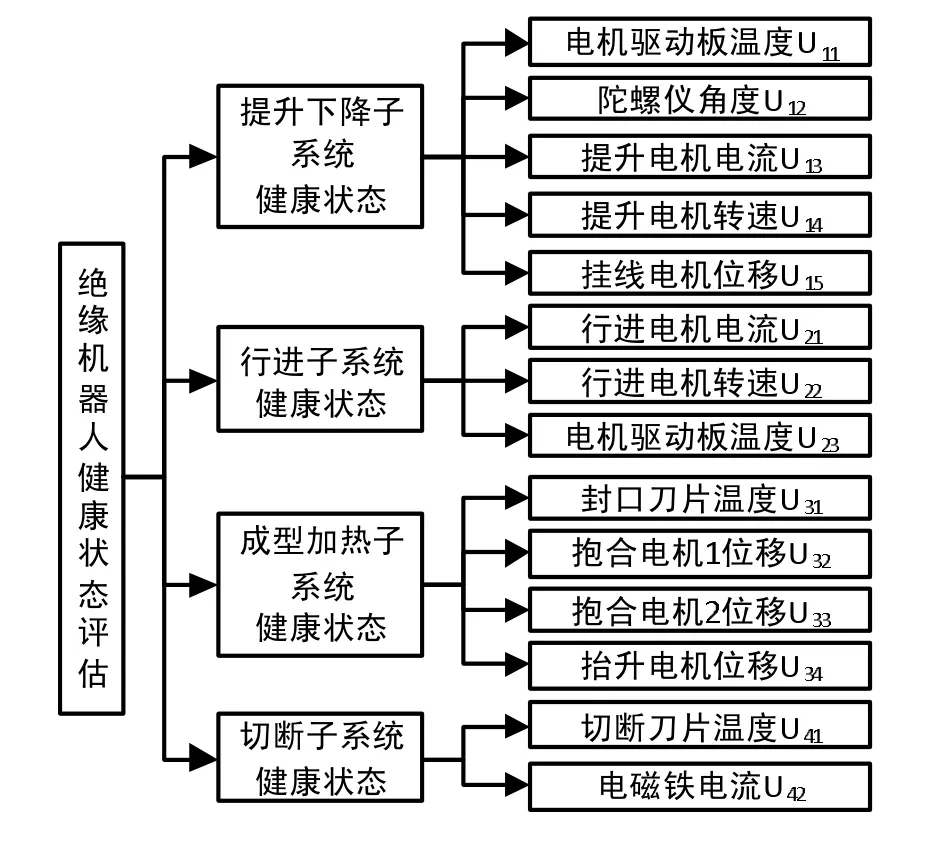
图1 绝缘机器人健康状态指标体系
2 绝缘机器人健康状态评估模型
2.1 指标标准化处理
对指标体系中的指标进行分类,可以分为越大越优型指标和越小越优型指标。
越大越优型指标标准化表达式为
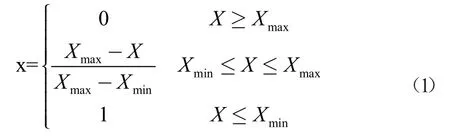
式中:x 为标准化后的指标数值;X 为指标实际运行值;Xmax为指标运行上限值;Xmin为指标运行下限值。越小越优型指标标准化表达式为:
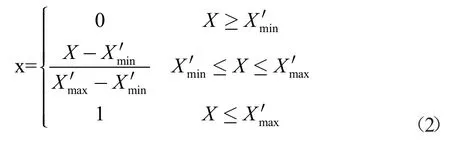
式中:x 为标准化后的指标数值;X 为指标实际运行值;X'max为指标运行上限值;X'min为指标运行下限值。
2.2 健康状态评估指标权重确定
2.2.1 改进层次分析法
层次分析法用来确定指标主观权重,按照指标间的相互关联影响两两比较,也就是指标之间的重要程度比较,从而构成判断矩阵,矩阵定义如下

判断矩阵元素的判断标准定量采用1~9 标定法[6]。
在传统的层次分析法中,由于比较结果具有主观性,需要通过一致性检验来判断矩阵是否具有一致性,否则就要对矩阵进行调整,为了避免多次调整,本文采取改进层次分析法,计算判断矩阵的拟优化传递矩阵使其满足一致性检验[5]。计算过程如下:
(1) 将判断矩阵转化为反对称矩阵B

(2) 解得最优传递矩阵C 为

(3) 得到拟优化传递矩阵

求得拟优化传递矩阵后采用规范列平均法求最大特征值对应的特征向量W,该向量就是权重向量,计算过程如下:
(1) 对每列元素归一化处理

(2) 将规范化后的判断矩阵按列相加

(3) 对向量做归一化处理

得到的wi就是指标的权重向量。
2.2.2 熵权法
熵权法用来确定指标客观权重,指标的异常程度越小,所反映的信息量也越少,其对应的权值也越低。计算步骤如下:

(3) 计算第i 个指标的熵向量为

组合赋权法求取综合权重,wi、vi分别是改进层次分析法和熵权法求得的权重主客观向量,指标组合权重向量为:

2.2.3 杰色聚类法
杰色聚类法是用来定量评估对象是否属于某一杰类的方法,通过白化权函数,计算各聚类对象对不同指标拥有的白化权值,以此来区分杰类[7]。
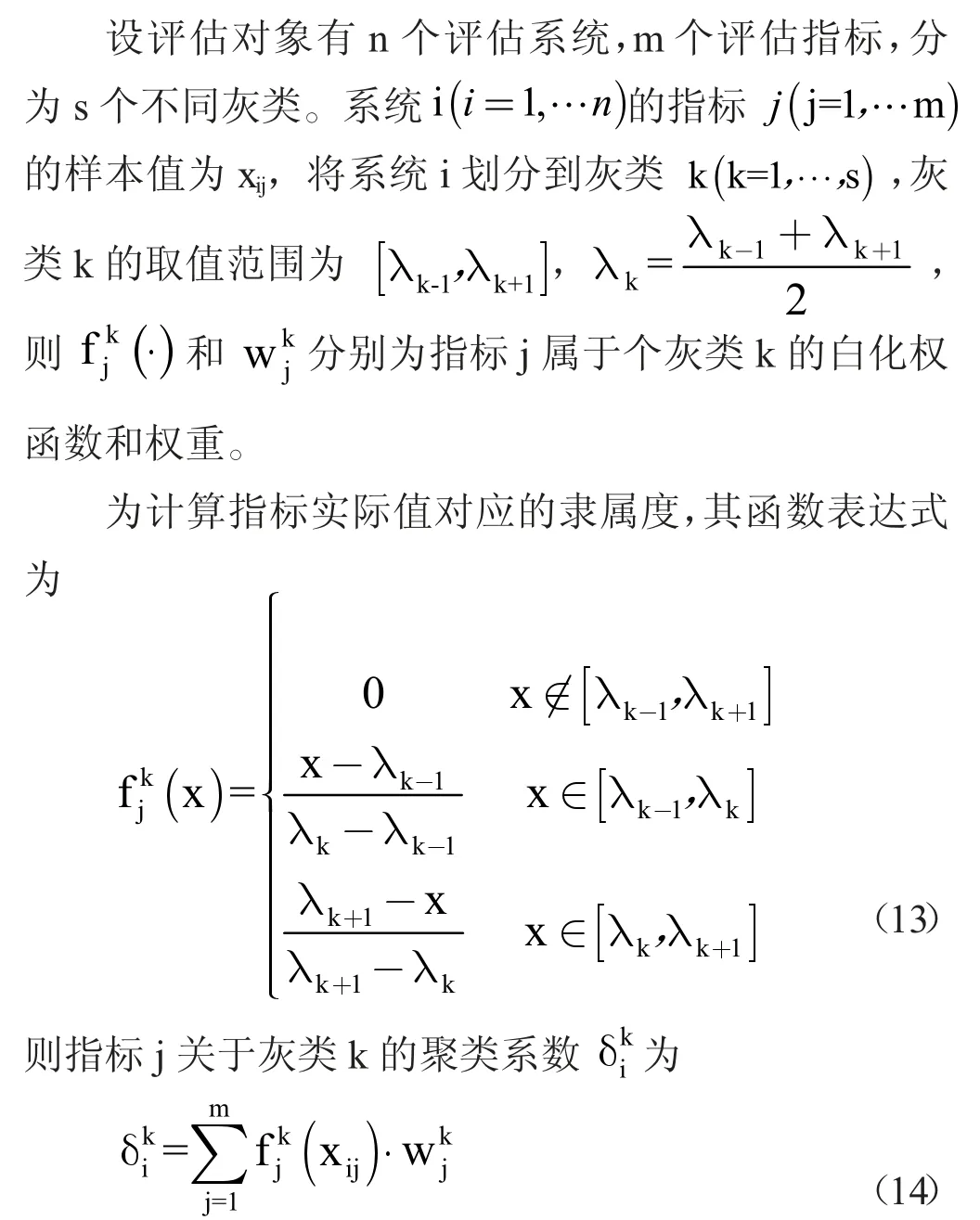
根据最大隶属度原则根据最大隶属度原则,判断系统i 在指标j 下属于何种杰类,即系统处于何种健康状态。健康状态等级和对应白化权函数见表1。
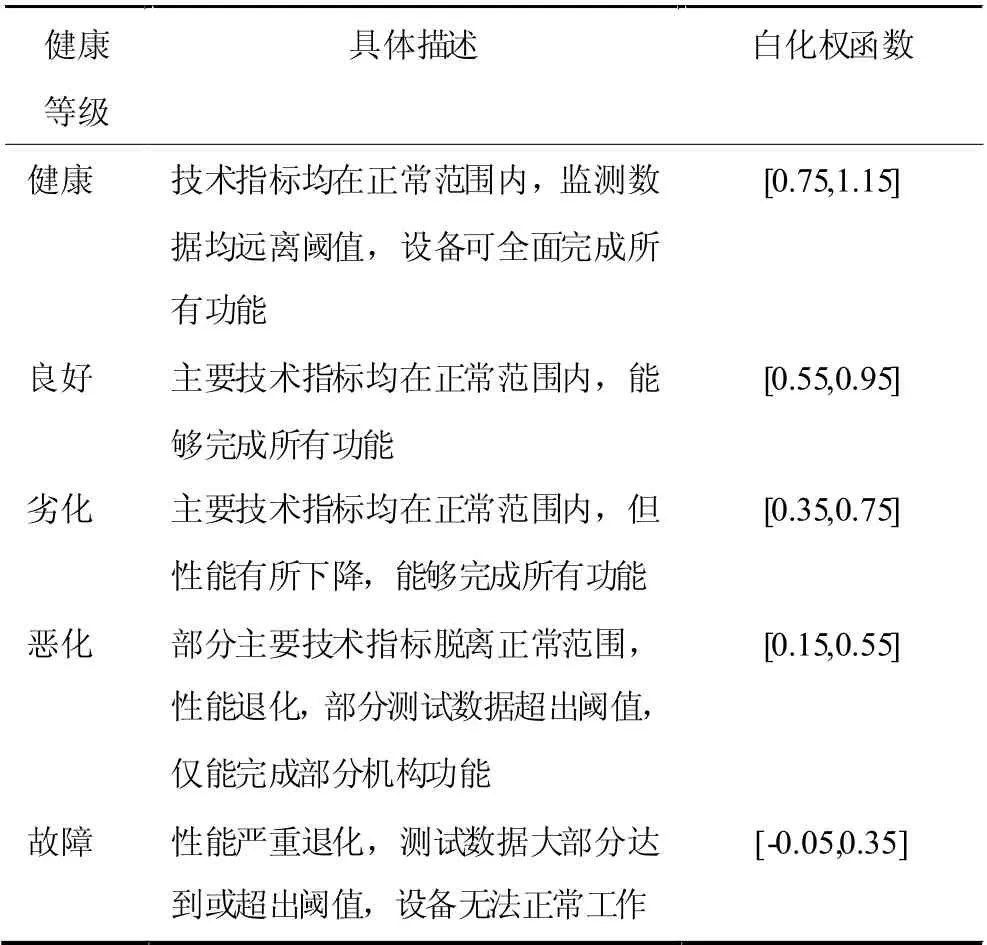
表1 健康状态等级和对应白化权函数
3 实验验证
3.1 子系统健康状态评估
根据成型加热子系统的状态数据,根据式(1)~式(2)原始数据进行无量纲处理,处理结果见表2。

表2 成型加热子系统状态无量纲处理数据
构建成型加热子系统判断矩阵见表3。

表3 构建成型加热子系统判断矩阵
根据式(4)~式(14)求得成型加热子系统聚类系数。

根据最大隶属度原则,判断该组数据下成型加热子系统处于健康状态。同理可对其他子系统进行健康状态评估,结果见表4。
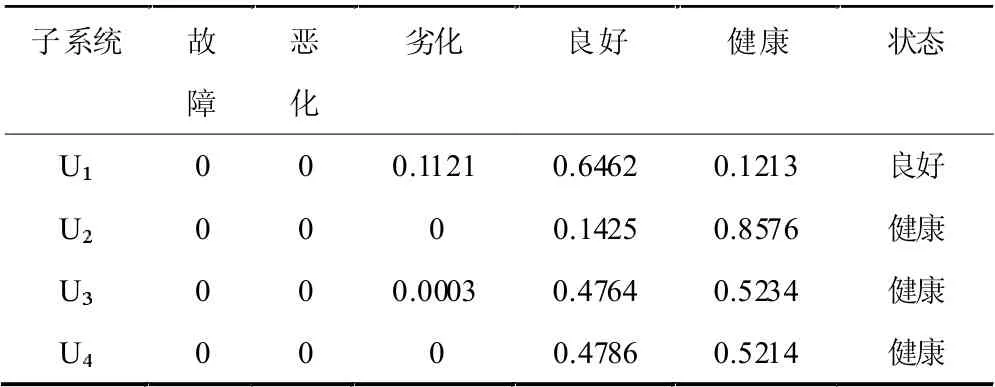
表4 绝缘子系统第一组数据评估向量
3.2 机器人健康状态评估
根据表5 建立整体健康状态评估矩阵并建立子系统层析分析法判断矩阵,求得绝缘机器人综合评估向量。

根据最大隶属度原则,判断绝缘机器人处于良好状态,技术指标均在正常范围内,能够完成所有功能。与机器人实际运行情况相符。
采集150 组绝缘机器人运行数据,采用组合赋权的健康状态评估方法进行评估,与采用单一的熵权法和层次分析法进行评估,对评估结果准确度进行比较,结果见表5。由表5 可知,组合赋权法对绝缘机器人运行健康状态的评估准确度明显高于采用单一评估方法的准确度。
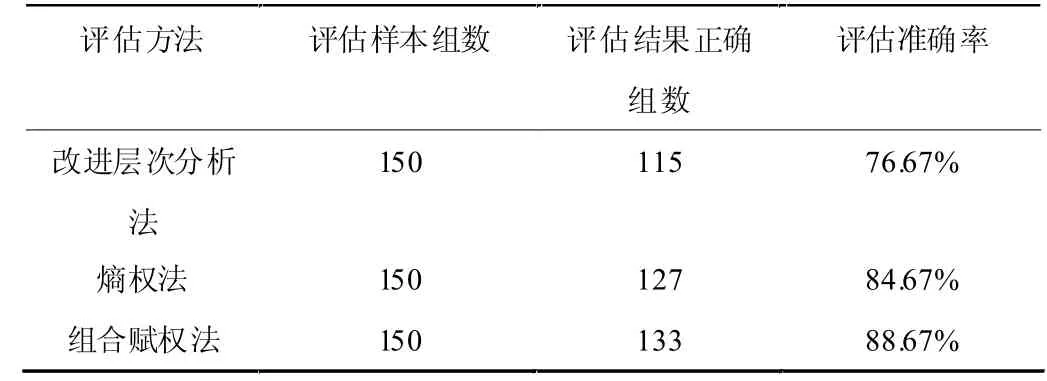
表5 不同健康状态评估方法准确度比较
4 结论
为绝缘机器人健康状态进行评估提供了新的方法,实现了对运行状态的实时监测,可以有效降低机器人工作安全隐患,并减少不必要的财产损失且评估结果表明,采用组合赋权法的评估方式,其评估准确率要高于采用单一赋权法的评估准确率。



