邹明伟, 张金魁
(1.成都信息工程大学 自动化学院, 四川 成都 610200; 2.重庆邮电大学 自动化学院, 重庆 400065)
0 引 言
人机共融是目前机器人研发的核心特点,人机共融是指机器人与人同在一个空间内,可跟随人员走动躲避障碍物并与人紧密协调地进行工作交互[1]。如物流机器人可跟随货物移动并避障,配合人员将货物运输到目的地,营业大厅机器人不仅可与人进行无障碍交流,还可跟随人走动为其提供相应的服务。就目前而言,在略微复杂的环境中,机器人人机共融效果存在一定缺陷,为此,研究移动机器人柔顺跟随行人方法意义重大。现在也有相关领域学者研究机器人跟随行人方法,如任恒乐等人提出移动机器人自主跟随技术[2],该技术利用相机拍摄机器人行走环境图像,以该图像为基础,通过直方图的形式检测行人后计算二者之间距离,实现机器人自主跟随。杜华臻等人提出一种激光雷达的机器人目标跟随方法[3],该方法利用雷达成像方式采集人体目标后,通过计算目标到机器人的跟踪偏角和跟踪距离控制机器人跟随行人。上述两种方法虽可实现机器人跟随行人,但均存在跟踪行人偏差情况,应用效果不佳。关节空间模型是描述机器人关节动力参数的模型,其在机器人控制和位姿计算等方面应用极为广泛[4]。本文以关节空间模型作为基础,研究基于关节空间模型的移动机器人柔顺跟随行人方法,提升移动机器人跟随行人技术水平。
1 移动机器人柔顺跟随行人方法
1.1 全局环境模型建立
在柔顺跟随行人场景中,移动机器人跟随行人的噪声信息较为复杂[5],移动机器人跟随行人场景内包括被跟踪行人、移动机器人、动态障碍物和静态障碍物,因此移动机器人的运动速度和方向多变[6]。在上述情况下,需建立移动机器人柔顺跟随行人全局环境模型。
使用基于特征描述的地图描述移动机器人全局环境,公式如下:
式中:M表示移动机器人全局地图;mi表示全局地图内的直线段,i= 1,2,…,n,n为直线段个数;Pi、λi分别表示直线段中心点和长度;(ρ,θ)表示笛卡尔空间内涵盖线段mi的直线。移动机器人的局部地图则是由机器人安装的摄像头采集其坐标系下的数据点组成。利用摄像机针孔模型可得到移动机器人摄像机标定参数。摄像机针孔模型如图1 所示。

图1 摄像机针孔模型示意图
在摄像机针孔模型内,P(x,y)为需要跟随的行人坐标,P′(x,y)表示成像平面内行人坐标。为得到移动机器人跟随行人的坐标,需要将成像平面内行人坐标转换为三维坐标[7]。令h表示移动机器人摄像机安装高度,yb为摄像机垂直投影最近距离,yb+yl为摄像机垂直投影最远距离,则摄像机两个水平视角与地面坐标系中y轴的夹角α、β计算公式如下:
令θ表示摄像机水平视角在地面上投影和y轴的夹角,其公式如下:
式中xl表示摄像机水平视角投影在地面上的最远距离。
令Zx、Zy分别表示移动机器人拍摄行人图像的行和列,依据式(2)~式(4)可得行人在机器人坐标内的坐标计算公式:
式中:(u,v)表示行人像平面坐标;(x,y)表示行人在机器人坐标系下的坐标。
依据式(5)、式(6)结果,可得移动机器人在其环境内需要跟随行人的坐标。
1.2 关节空间动力学模型构建
建立移动机器人关节空间动力学模型,依据该模型获得移动机器人柔顺跟随的控制动力学参数。
令K表示移动机器人在平台坐标系下关节系统动能,公式如下:
式中:˙表示移动机器人广义跟随速度;T表示移动机器人广义跟随速度的正态分布;ms表示平台坐标系下移动机器人关节空间质量矩阵。
当移动机器人位于关节空间坐标系下时,其系统动能可改写为:
式中:l˙表示系统关节伸长速度;l˙T表示正态分布的系统关节伸长速度;ma表示关节坐标系下移动机器人关节空间质量矩阵。
由式(7)、式(8)可知移动机器人在平台坐标系和关节空间坐标系下系统动能之间关系为:
式中:Ψl,x表示移动机器人关节伸长速度的雅可比矩阵;为正态分布的雅可比矩阵。
依据式(9)可得关节坐标系下移动机器人关节空间质量矩阵ma计算公式:
式中:表示移动机器人关节伸长速度雅可比矩阵的逆矩阵。
令fa表示移动机器人关节矢量,其公式如下:
式中:Cs表示关节位移矢量;Gs表示加速度矢量。
对x˙进行求导,则有:
将式(12)代入到式(11)内,可改写为:
式(13)即为移动机器人关节空间动力模型,利用该模型可输出移动机器人关节矢量参数。
1.3 移动机器人柔顺跟随行人方法
以移动机器人关节空间动力模型输出关节矢量参数为基础,利用改进弹簧模型方式实现移动机器人柔顺跟随行人。
令r表示移动机器人,h表示跟随的行人,移动机器人在柔顺跟随行人时,将机器人和行人之间看做一个虚拟弹簧,弹簧松紧状态描述行人与移动机器人之间的距离[8-9],则移动机器人和行人之间的弹簧松紧状态srh公式如下:
式中:l0、lrh分别表示虚拟弹簧松弛长度和机器人与行人之间的距离。
移动机器人环境内的障碍物为其施加了斥力Qrh,则此时移动机器人虚拟弹簧合力Q公式如下:
式中:Qi表示虚拟弹簧弹力;n表示弹簧个数。
令L表示移动机器人虚拟弹簧端点到机器人旋转中心距离,J表示转动惯量,则移动机器人柔顺跟随行人动力学模型公式如下:
式中:m表示移动机器人质量;˙表示移动机器人柔顺跟踪时的线加速度和角加速度。利用该公式即可实现移动机器人柔顺跟随行人。
2 实验分析
以某公司生产的S1 移动机器人作为实验对象,该移动机器人为锂电池供电,电池容量为20 A·h,重量为12 kg。将本文方法应用到该移动机器人柔顺跟随行人过程中,分析本文方法实际应用效果。
获取行人位置是移动机器人柔顺跟踪的基础,在该移动机器人柔顺跟随场景内,选择10 个行人,应用本文方法计算10 个行人的位置,计算结果如图2 所示。

图2 行人位置计算结果
分析图2 可知,应用本文方法计算10 个行人位置,计算位置与行人实际位置均完全吻合,说明本文方法计算行人位置精度较高,对机器人柔顺跟随行人效果较好。选择1 位行人,使其在环境中无序行走,应用本文方法控制移动机器人对其进行柔顺跟随,分析其柔顺跟随效果,结果如图3 所示。
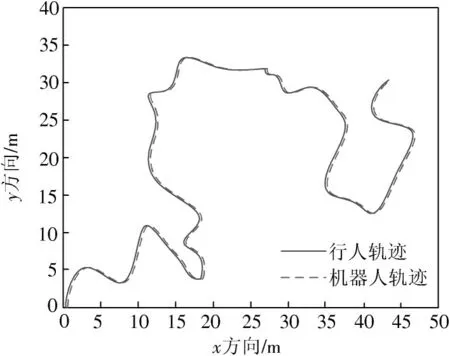
图3 移动机器人柔顺跟随行人结果
分析图3 可知,当行人在环境内无序行走时,本文方法控制移动机器人的运行轨迹与行人轨迹重合,说明方法可有效控制移动机器人对行人进行柔顺跟随,具有较好的应用效果。
当行人在环境中无序行走,给出移动机器人在柔顺跟随行人时的速度曲线和角速度曲线,结果如图4、图5所示。

图4 移动机器人跟随速度曲线

图5 移动机器人跟随角速度曲线
综合分析图4、图5 可知:应用本文方法控制移动机器人柔顺跟随行人时,其跟随速度和角速度在跟随时间较小时波动较大;但随着跟随时间增加,移动机器人的跟随速度和角速度均保持较为平稳状态,说明应用本文方法后,移动机器人柔顺跟随行人时不受行人转变方向影响,可有效保持匀速跟随。
3 结 论
本文提出一种基于关节空间模型的移动机器人柔顺跟随行人方法,利用关节空间模型获取移动机器人关节矢量,以其为基础对移动机器人跟随速度和跟随角度进行控制,实现移动机器人柔顺跟随行人。经过实验验证,该方法具备较好的移动机器人柔顺跟随行人能力,未来可在机器人自动跟随领域广泛应用。



