付深圳 孙运强

摘 要:本系统采用ARM平台的μC/OS-II系统,实现了对用户投放的饮料瓶进行有偿的回收。系统采用基于CAN总线的设计,实现了主控与被控之间的协调工作,采用RFID技术对用户身份信息的识别。用户在插入身份ID卡后,智能饮料瓶回收机开始工作,对用户投放的饮料瓶进行大小的判断并判断重量是否在所需范围之内,如果用户投放的饮料瓶符合回收的标准,智能回收机就顺时针翻转将饮料瓶倒入并计数存储信息,如果不符合回收的标准就逆时针翻转倒出,用户投放完饮料瓶拔卡时,智能饮料瓶回收机把用户的信息、所投放饮料瓶的大小跟个数通过无线上传。
关键词:ARM;μC/OS-II系统;CAN总线;RFID技术
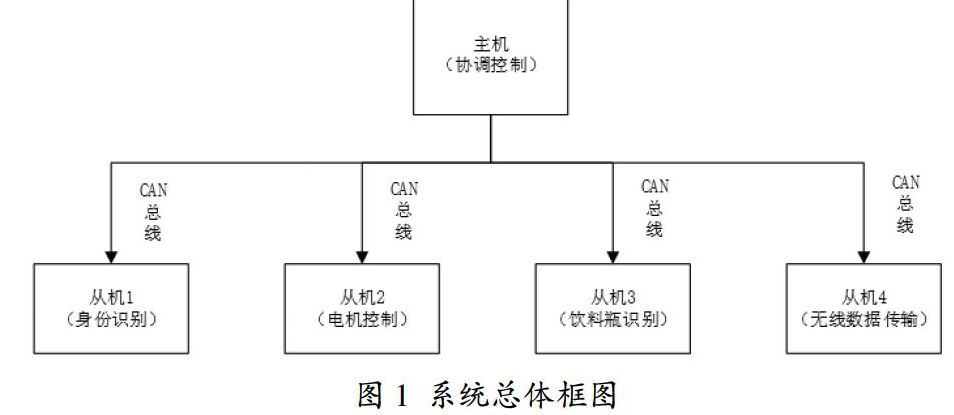
1 系统的总体设计
图1给出了系统的总体设计框图,主机是通过CAN总线与各个从机进行信息传递的,从机只跟主机相互传递信息,从机与从机之间没有任何联系,系统的运行是以主机为中心
2 硬件设计
(1)CPU:主机与从机采用高性能、低成本、低功耗的STM32F10
3系列,STM32是嵌入式应用专门设计的ARM Cortex-M3内核[1]。
(2)电机:本系统选择的是57BYG型两相混合式步进电机。电流3A,步距角1.8°采用24V电压供电,轴径6.35mm,静力矩1.8NM。
(3)超声波阵列:本系统采用HY-SRF05超声波阵列对饮料瓶的形状进行判断,本模块性能稳定,测量精确,使用DC5V供电,感应角度小于15°,探测距离2cm-450cm,精度可达0.3cm。系统物资识别采用基于超声波探测和称重结合从而识别物资(饮料瓶、易拉罐等)形状的物资识别装置,超声波测距模块和称重模块与处理模块连接,超声波测距模块识别饮料瓶长度和直径,称重模块识别其重量,处理模块根据超声波测距模块和称重模块决定是否是要收取[2]。系统工作原理框图如图2所示。
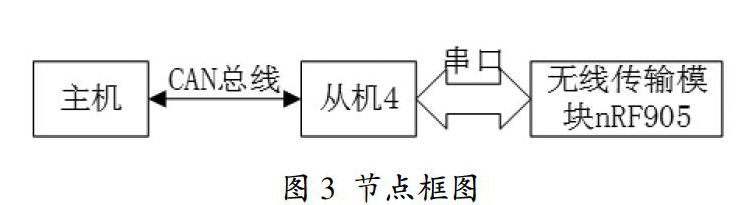
(4)无线数据传输:采用沈阳维恩科技生产的JASK-AVR-NRF
905无线模块,此无线模块搭载的无线传输芯片是nRF905,它是挪威Nordic公司推出的一款单片机射频发射器芯片,工作于433、868、915MHz3个ISM频道,其中国内433频段可以免费使用。在最大发射功率10dbm的条件下,配置外置鞭状天线通信距离在300米左右[3]。无线传输框图如图3所示。
(5)用户身份ID卡:用户身份ID卡采用125KHz的串口读取R
FID读卡模块,读卡距离最大5cm,灵敏度高,采用嵌入式微控制器先进的射频接收线路,嵌入式微控制器设计。
(6)CAN总线设计:CAN总线是本系统的灵魂,是主机与各个从机之间进行指令、数据传递的桥梁。本系统用的是STM32自带的bxCAN,即扩展CAN。它支持CAN协议2.0A和2.0B。它的设计目标是,以最小的CPU负荷来高效处理大量收到的报文。它也支持报文发送的优先级要求(优先级特性可软件配置)。对于安全紧要的应用,bxCAN提供所有支持时间触发通信模式所需的硬件功能。
3 系统工作流程
用户插入卡之后,智能回收机对用户插入的身份ID卡进行有效判断,如果是有效卡播放语音提示开门,如果不是有效的身份ID卡,则提示无效;在用户投放饮料瓶后对饮料瓶的形状大小、重量进行判断,并记录存储,如果饮料瓶的重量超出所回收范围则倒出,在所回收范围则回收,这样一直循环等待用户拔出身份ID卡,用户拔出身份ID卡之后,智能饮料瓶回收机会对用户投放的饮料瓶个数与大小信息通过无线网络传到上位机,智能饮料瓶回收机关门。后台管理人员通过后台对其进行结算。工作流程图如图4所示。
4 结束语
在物资回收过程中,回收物的识别主要依靠条码识别,如条码不清楚或已损坏,则会漏掉一些可回收物,为了改善此种情况,项目组提出基于超声波探测的物资识别装置的解决办法,下一步拟采用图像识别的方法,利用双目视觉原理,识别回收物的大小、尺寸等,进一步提高识别速度、降低识别误判率。
参考文献
[1]STM32F103_数据手册(中文).信息与通信工程科技专业资料[EB/OL].http://wenku.baidu.com/vi
ew/f2f7c71c561252d380eb6e91.ht
ml.
[2]单爱斌.智能饮料瓶回收机的设想及应用[J].科技资讯,2011,9:36.
[3]周曦.无线自组织网络的可靠服务研究[D].复旦大学,2012.
[4]周贤善,谢婷婷.移动Ad Hoc路由协议分析[J].孝感学院学报,2008,3:64.



