张绪棋 杨久东
摘 要:文章以贵州修文县的航摄项目为例,通过PPK技术辅助无人机摄影测量对测区进行了航空摄影测量,对PPK差分后获得的POS数据进行了精度分析,并使用PIX4D软件结合POS数据进行了成图处理,通过DOM和DSM模型提取了检查点的坐标与高程并与真值进行对比。讨论了当使用较少的像控点时,PPK辅助无人机地图是否能够满足大比例尺测图的要求。
关键词:PPK事后差分;无人机测图;大比例尺;GNSS
中图分类号:P258 文献标志码:A 文章编号:2095-2945(2019)29-0073-03
Abstract: In this paper, taking the aerial photography project in Xiuwen County, Guizhou Province as an example, the aerial photogrammetry is carried out using PPK technology to assist UAV photogrammetry, and the accuracy of POS data obtained by PPK difference is analyzed. Using PIX4D software combined with POS data to map processing, through DOM and DSM model, this paper extracts the coordinates and elevation of the checkpoint and compares them with the true value. The paper also talks about whether the PPK aided UAV map can meet the requirements of large-scale mapping when fewer image control points are used.
Keywords: PPK post difference; UAV mapping; large scale; GNSS
引言
传统的摄影测量需要布设大量的像控点,通过解析空中三角形来解算六个外方位元素[1]。GNSS通过差分可以在无人机测图时提供摄影测量中心曝光时刻的三个空间位置信息,进而达到减少外业像控点的目的。无人机摄影测量中常用的定位技术包括实时动态差分(RTK)和事后动态差分(PPK),两种差分方式原理不同但精度基本一致,由于无人机测图中POS数据的实时采集几乎没有实际意义[2],PPK技术在无人机测图中的优势逐渐显现,PPK辅助无人机摄影测量的测图方式也变得越来越常见,PPK技术将会逐渐成为无人机测图领域的主要定位技术。
1 PPK在无人机测图中的优势
PPK是GNSS的一种差分方式,又被称为事后动态差分技术,PPK技术通过OTF初始化快速确定整周模糊度,通过基站和流动站同时观测多个历元,并通过事后的基线解算获得厘米级精度的三位空间位置信息。与RTK不同,PPK技术不需要基站和流动站之间的实时数据链通信,因此PPK相对于RTK作业距离显着增加[3],PPK技术在无人机摄影测量中的应用很好的弥补了RTK技术距离短以及RTK数据链易断裂的不足,PPK已经成为航测中更稳定高效的定位技术。
2 PPK辅助无人机测图
2.1 PPK辅助无人机测图原理
无人机测图是一种将相片上的像点坐标转化为真实地理坐标的过程,通过航摄中心、像点以及其对应的物点三者共线来建立构像方程[4],通过一定的平移旋转将像平面坐标系上的图像点转换为物方坐标系中的对应地物点。
传统的摄影测量通过布设大量的野外控制点通过解析空中三角形的方式来解算六个外方位元素。GNSS在无人机领域的应用使无人机通过搭载GNSS接收机可以获得较高精度的时间信息与对应的无人机航线信息,即无人机在某时刻的位置信息,从而获得航摄中心对应时刻的空间位置信息,结合相机的曝光时间文件,最终得到相机在拍摄照片时的航摄中心的(XS、YS、ZS)。GNSS辅助无人机测图通过提供高精度的(XS、YS、ZS)大大的增加了无人机测图的数据冗余,从而大量的减少了外野像控点的数量。
2.2 PPK辅助无人机测图流程
PPK辅助无人机测图包括三个阶段准备阶段、航拍阶段与成图阶段。
准备阶段根据测区与测图的要求完成航线的规划与控制点的布设,最常见的像控点布置方案包括航带网法和区域网点法,在保证测图精度的前提下,外业像控越少越好[5]。
在航拍阶段,PPK不需要基准站与流动站之间具有实时的数据链通讯,因此PPK辅助无人机测图中基准站与测区距离在50km范围内即可,但PPK的测量精度会受基准站与无人机距离的影响,因此为保证基准站信号质量,要求基准站与测区距离尽量小[6]。在起飞前还需要将设备进行初始化,一般初始化时间为8-10min,在航飞时应按照航线规划要求进行,保证飞机正常工作[7]。
数据的处理与成图阶段是通过PPK事后差分获取本次航摄的POS数据,通过无人机成图软件对获得的相片结合相控文件以及POS数据进行制图,获得4D产品,并对成图精度进行分析。
3 案例介绍
实验以贵州修文县航摄项目为例,测区长6公里宽约2.5公里,总计15平方公里;测区地形为平地与丘陵相结合,以平地为主,地势起伏不大,适宜无人机测量。
测图比例尺为1:2000,无人机飞行高度为1200米,航向重叠不小于60%,旁向重叠不小于30%,在测区内布设6个像控点,44个检查点,基站距离测区中心5.5公里。采用六点法布设像控点,检查点均匀分布于测区内。
POS数据经GGPOS软件通过PPK差分获得,并结合POS数据、相片以及控制点文件对本次试飞通过PIX4D软件进行成图处理获得DOM与DSM产品。
4 精度分析
4.1 POS数据精度
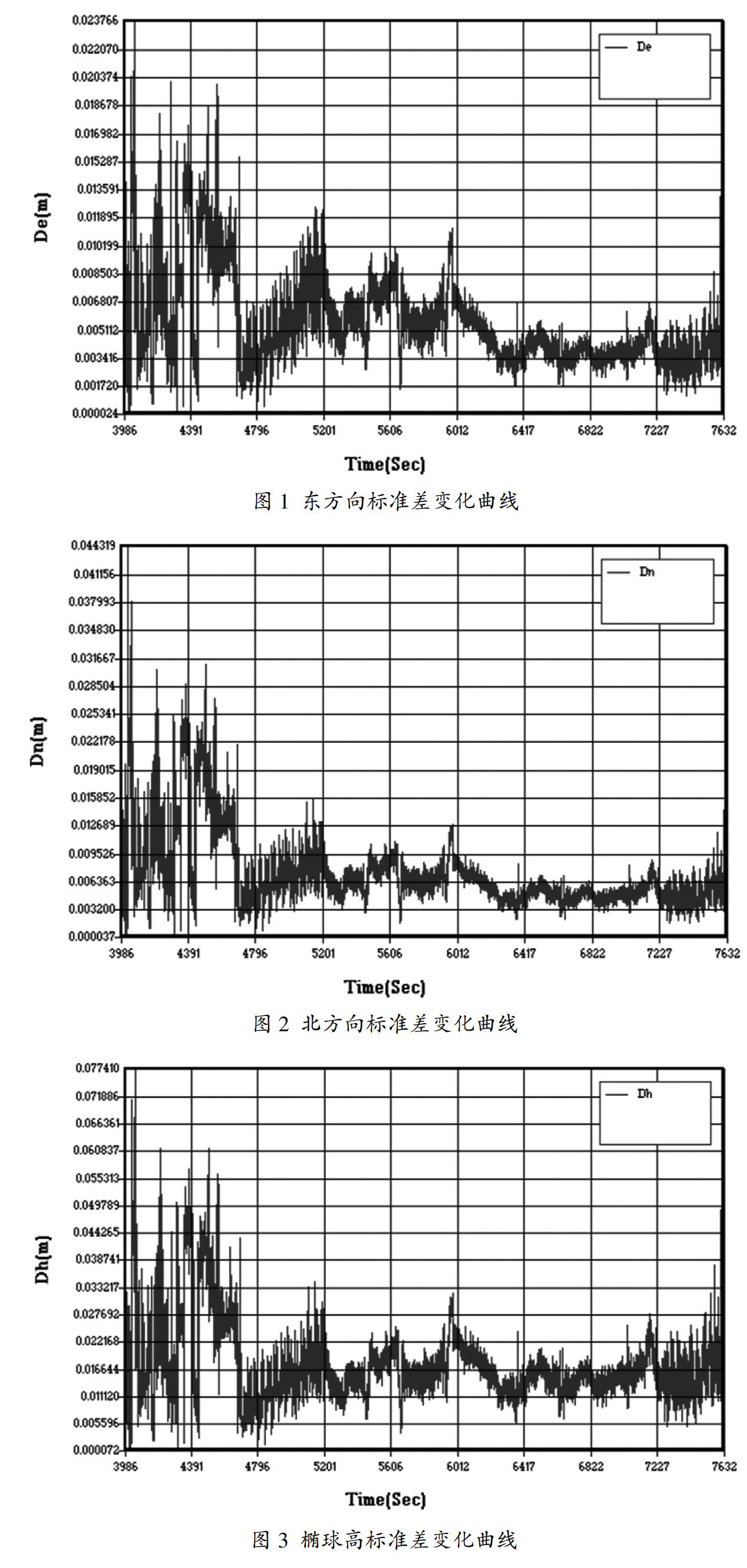
POS数据的精度直接取决于PPK定位的精度,通过事后差分并对差分结果进行分析,分别获得东方向标准差、北方向标准差、椭球高标准差与时间的变化曲线,图1-3分别反映了三者与GPS周秒的关系。
通过上面的变化曲线可以发现,由于初始化的原因,东方向标准差、北方向标准差与椭球高标准差在3986-4700周秒间波动范围都比较大,但在之后的飞行过程中精度较高,东方向与北方向标准差在0.6-1cm之间,而椭球高标准差在之后的飞行中在1-2.5cm之间。
图4、5为此次航飞的椭球高度与PDOP位置精度因子与GPS周秒之间的变化情况。
在3986-4700周秒之间飞机没有起飞,因此验证了在该时间段精度较低是由于初始化造成的,而无人机到达指定航高的时间范围为5200-7200周秒之间,结合PDOP位置精度在该时间段的精度因子小于2,因此本次航飞所获取的POS数据具有较高的精度。
4.2 成图精度分析
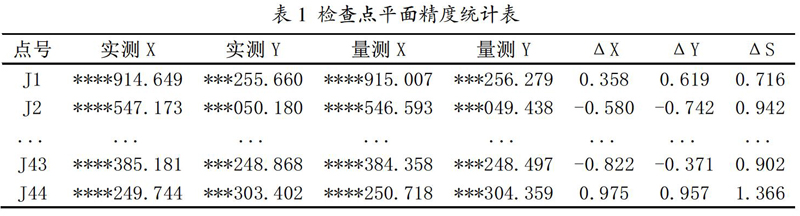
以检查点的实测值作为真值,通过制图获得的DOM影像提取检查点的坐标作为量测值,通过对比实测值与量测值并做差,得到平面坐标的ΔX、ΔY、ΔS,部分数据如表1所示。
5 结束语
实验展示了PPK辅助无人机测图的一般作业流程,突出了PPK技术在无人机测图领域的优势, PPK技术不需要保持基准站与流动站之间实时的数据链,使得无人机测图范围变大;对PPK生成POS数据质量的分析,总结出经过初始化后PPK能为摄影测量提供厘米级的平面位置精度与2-3厘米高程精度的POS数据;通过对成图精度分析,利用PPK辅助无人机在1:2000测图比例尺在测区内布设少量的像控点的情况下,对平面及丘陵地区的测量能够满足平面与高程的测图精度要求,PPK辅助无人机测图在使用较少像控点的情况下能够满足大比例尺成图的要求。
参考文献:
[1]赵志刚.航空摄影测量外业像控点布设的精度分析及应用[D].长安大学,2015.
[2]吴定邦.浅谈无人机航空摄影测量技术在水利工程中的应用[J].江西水利科技,2016,42(1):57-61.
[3]李哲,高立,乔辉.GPSPPK技术在测量外业中的应用探讨[J].测绘与空间地理信息,2012(5):120-121.
[4]郑甜甜.基于航测影像生成DLG技术研究[D].山东科技大学,2015.
[5]梁超.GPSPPK技术在测量外业中的应用探讨[J].建筑工程技术与设计,2015(26):176.
[6]李红阳,李策,吴长悦.无人机后差分在大比例尺地形测绘中的应用研究[J].世界有色金属,2018,500(08):43-44.
[7]刘超,高井祥,于子晏,等.GPS/伪卫星相对定位中伪卫星优化布设模型研究[J].中国矿业大学学报,2012,41(1):120-126.



