蒋 汉,董 宇,徐泽锋,张 匡,吴杰玉
(上海空间电源研究所,上海 200245)
2007 年10 月,中国第一颗探月卫星“嫦娥一号”(CE-1)成功发射升空,中国成为世界上具备深空探测能力的国家之一[1]。探月工程三步走战略的收官之战“嫦娥五号”(CE-5)于2020 年11 月成功发射,并于12 月携带1731 克月球样品返回地球,实现我国首次地外天体采样返回。随着中国深空探测计划稳步推进,现阶段我国小天体探测进入设计验证阶段。我国计划通过一次发射,实现近地小行星(NEA)伴飞、附着、采样返回和主带彗星绕飞,为小天体起源及演化等前沿研究提供科学探测数据和真实样品。本文研究分析国内外类似深空探测任务的探测器电源系统特点,为我国小天体探测电源系统设计提供依据。
1 小天体探测任务特点
近年来,国内外开展深空探测情况如表1 所示,相比于近地轨道探测器,小天体探测器的探测任务具有以下变化趋势和特点:

表1 国内外开展深空探测情况
1.1 任务形式更复杂
深空探测任务从过去飞跃探索,到现在的绕飞、附着、采样返回,向今后偏转、操控、利用发展。
1.2 探测距离更远
小天体探测器的近日点位于近地轨道,与太阳的距离小于1.3AU;远日点位于分布于火星和木星之间主带小天体轨道,距离太阳2.0~4.0AU[2]。
1.3 能源需求更高
小天体探测轨道变化复杂,大多数探测器(“隼鸟号”“黎明号”“罗塞塔号”“贝皮·哥伦布号”等)都使用具有高比冲、长寿命和高度自主巡航特点[3]的电推进方式执行巡航阶段轨道机动。与此同时,电推进负载提高对最大功率的需求,提高母线的电压等级。
1.4 环境差异更大
探测任务初末期与太阳距离的大跨度变化,使得探测器工作的环境温度和光照强度存在更大差异,呈现宽温度和光照变化范围。
2 小天体探测电源系统
2.1 航天器电源系统架构
太阳电池阵-蓄电池组联合供电电源系统作为首选的典型空间电源系统,具有结构简单、寿命长、技术成熟、功率范围大等特点[4],其可靠性得到实际飞行任务验证,适用于小天体探测任务,如图1 所示。
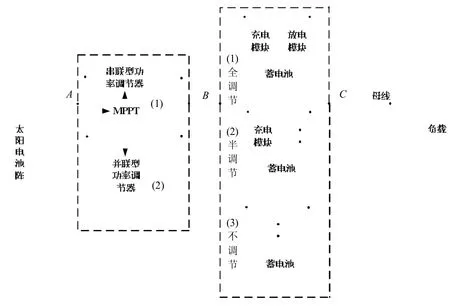
图1 航天器太阳电池-蓄电池组联合供电拓扑
根据太阳阵功率调节方式不同分为串联型功率调节器和并联型功率调节器,前者为峰值功率跟踪系统(PPT),后者为直接能量转换系统(DET);根据母线蓄电池充放电模块配置情况分为全调节母线、半调节母线和不调节母线。
2.2 深空探测器电源系统特点
不同于近地轨道的探测器和应用卫星,小天体探测器的探测任务的特点使其对电源系统供电保障的各项指标提出更高要求[5],主要体现在:
(1)对温度和光强宽变化范围的适应性
探测距离大幅变化使得探测器工作的温度和光强存在较大差异,影响着太阳电池阵输出伏安特性曲线,太阳阵输出电压为宽变化范围,如表2 所示。
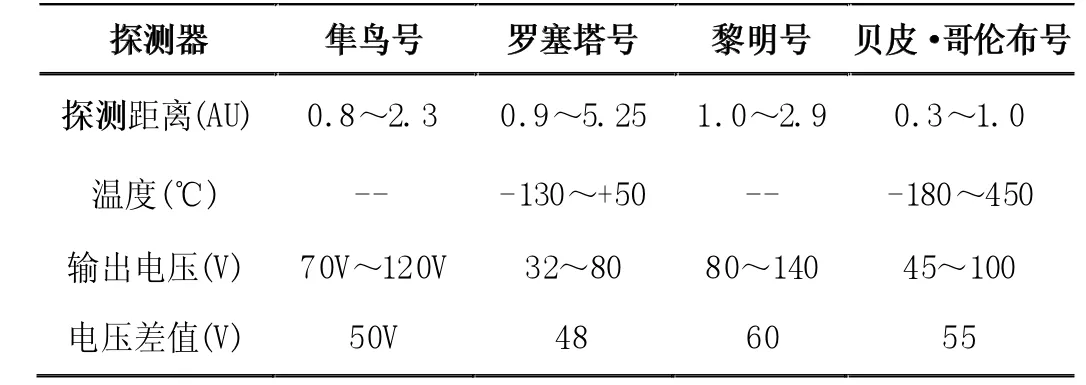
表2 国外小天体探测器探测距离和输出电压对比
我国小天体探测器太阳电池阵预计输出功率如表3所示,太阳阵输出电压为77.2V~119.8V,电压差值为42.6V。因此,要求电源变换器具备温度和光强的宽变化范围适应性,即具备宽输入电压范围变换能力。
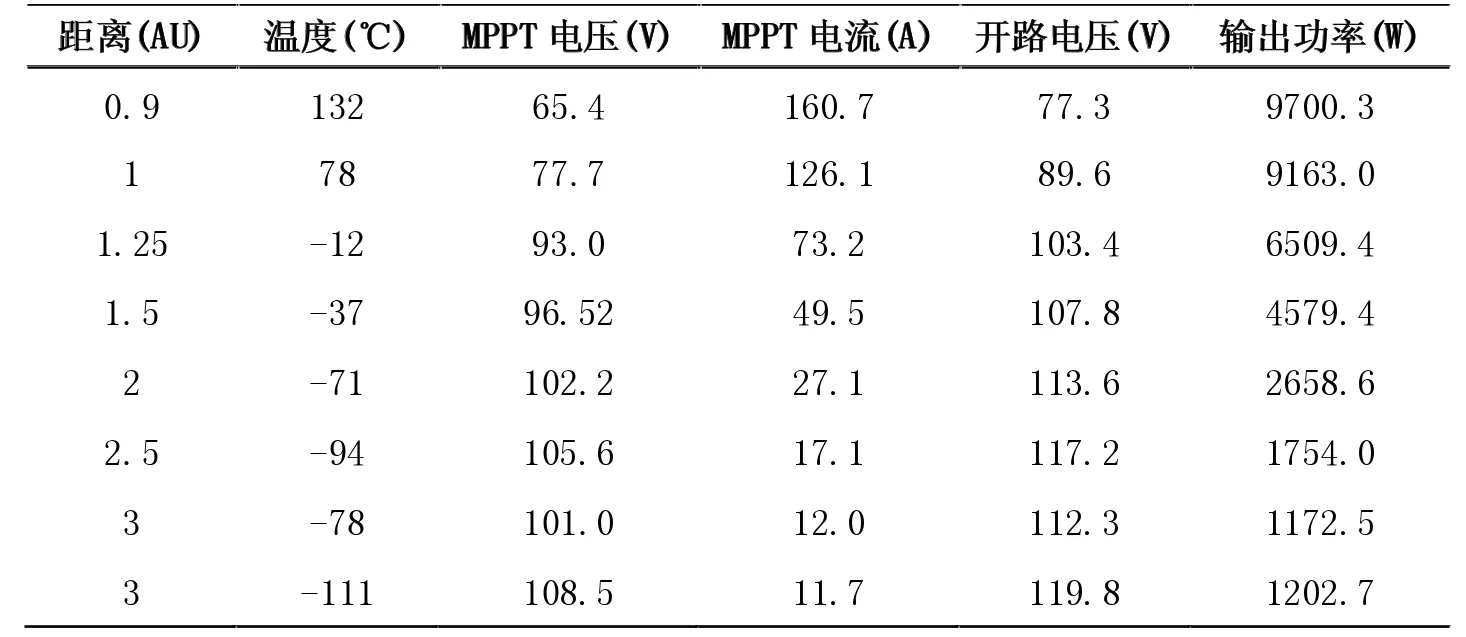
表3 我国小天体探测器太阳电池阵预计输出功率
(2)高效率和高功率密度
深空探测受火箭带载能力的约束,对电源分系统重量指标更为严格。为满足平台负载需求,电源变换器需满足高效率和高功率密度。典型深空探测器电源转换效率如表4 所示,变换器转换效率均在92%以上。因此,要求电源变换器轻量化设计,提升重量比功率。

表4 典型深空探测器电源变换器效率
(3)新型电源系统控制技术
小天体探测的轨道呈现出由近及远和循环往复的特点,如图2 所示,“罗塞塔号”任务期间多次机动改变轨道,探测器不断在近日点和远日点间切换。同时,任务初期和末期的功率差异。我国小天体探测太阳电池阵输出功率从初期9700W(0.9AU,132℃)到末期1202W(3AU,-111℃);“罗塞塔号”从初期7125W(1AU,50℃)到末期400W(5AU,-130℃);“黎明号”从初期10700W(1.0AU)到末期1100(3.0AU)差异明显。
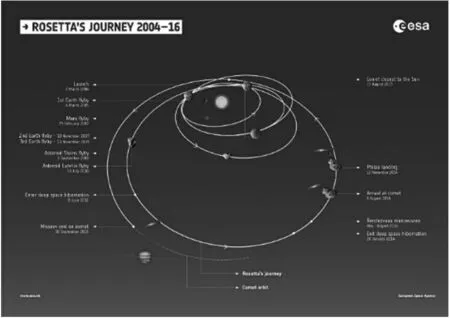
图2 深空探测“罗塞塔号”任务轨道变化图
近日点和远日点、初期和末期能源的变化差异,对传统并联分流调节器造成挑战。通常,并联分流调节器以环境能源恶劣端(末期远日点)设计分流电路,使得变换器的分流模块在初期近日点大部分处于分流状态,能量损耗在分流电阻上。这样不仅给热控系统造成压力,同时为增加系统可靠性的冗余设计提高电源系统质量,不适应远距离探测任务。因此,为了提高对不同太阳电池输出伏安特性曲线时功率利用率,采用串联型功率调节器,并以适当策略控制蓄电池充放电功率,需研究新型电源控制技术。
3 国外小天体探测器电源系统
根据国内外开展深空探测情况,对典型深空探测电源系统总结如下。
3.1 “隼鸟号”“隼鸟二号”电源系统
“隼鸟号”的电源系统框图如图3 所示,JAXA 后来发射的“隼鸟二号”和“拂晓号”均继承“隼鸟号”的电源系统技术。“隼鸟号”探测近地小行星“系川”(Itokawa)并取样返回。为满足远距离探测任务采用功率需求更大的离子电推进。同时,太阳电池伏安特性在初期近日点和末期远日点存在较大差异,分别为近日点(1.0AU)2.6kW 和远日点(1.4AU)1.4kW。为此,母线功率调节方式并未采用成熟的并联型诸如S3R、混合型或S4R,而是选用适应宽输入范围的串联型。电源系统基于串联型功率调节方式设置双母线,一条母线给大功率、高电压电推进模块单独供电,另一条母线经Buck 降变换器变换为50~52V 母线电压给平台负载和蓄电池组供电。
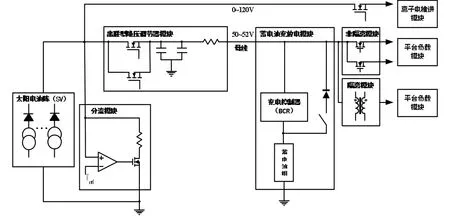
图3 深空探测“隼鸟号”电源分系统图
3.2 “罗塞塔-菲莱”电源系统
“罗塞塔-菲莱”电源系统如图4 所示,作为首个彗星附着探测器,探测最远距离达5.25AU。探测器未采用电推进,但为满足宽范围温度和光照变化,电源控制器为串联型,母线为全调节单母线拓扑。在太阳电池阵输出电压为32~80V 的范围下,控制母线电压为28±0.1V。
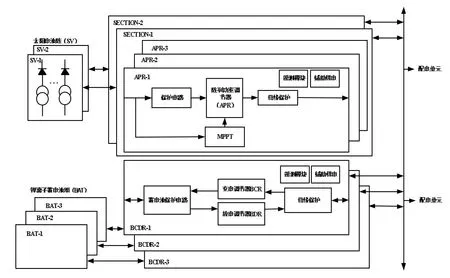
图4 深空探测“罗塞塔-菲莱”电源分系统图
3.3 “贝皮·哥伦布”电源系统
“贝皮·哥伦布”电源系统如图5 所示,探测器的探测目标为距离太阳最近的水星,任务进行期间探测器环境温度逐渐升高,太阳电池阵的输出电压降低,输出功率增加。为了满足宽范围温度和光照变化,电源控制器采用顺序开关分流最大功率调节器(S3RMPR)与串联型Weinberg 升压变换器相接的结构[6],将并联型的S3R 拓扑和串联型的Weinberg 拓扑相结合。既能降低母线的输出阻抗,减小大功率电推进负载开通关断时母线电压的纹波,又能利用串联型Weinberg 的电压控制环,保证变换器宽输入范围条件下输出电压的稳定。新系统架构结合S3R 和Weinberg 的高效率和轻量化的成熟设计,具备高达10kHz 的带宽,能减小高功率高动作频率的电推进负载对母线电压的冲击。
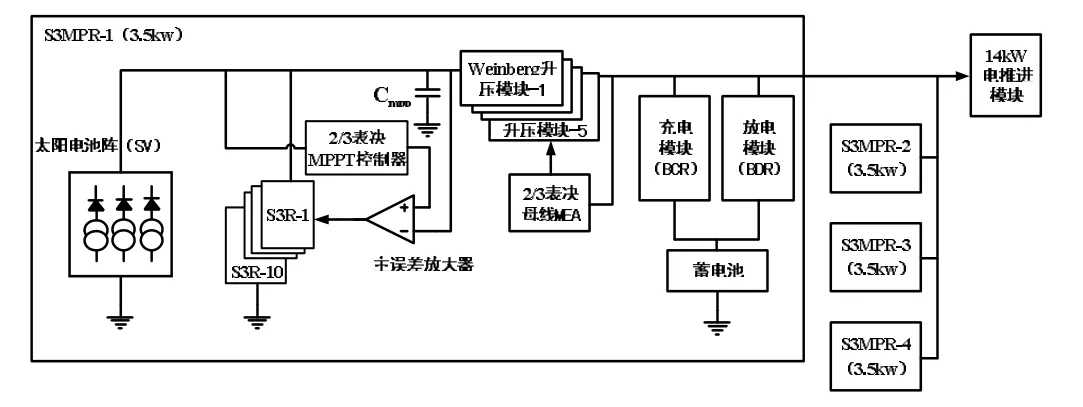
图5 深空探测“贝皮·哥伦布”电源分系统图
3.4 “嫦娥五号”电源系统
作为我国探月工程“绕、落、回”三步战略最后一步的“嫦娥五号”分为轨道器、着陆器、上升器三部分,其轨道器电源系统框图如图6 所示。“嫦娥五号”的近地轨道、地月转移轨道和月球轨道相比于小天体探测的轨道而言距离跨度很小,太阳阵输出伏安特性曲线差异小,因此采用传统成熟的并联型功率调节方式。电源系统设两条母线,分别为母线电压29±1V 的全调节母线和23~29V 的不调节母线。
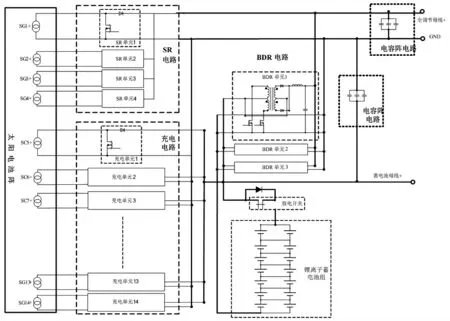
图6 深空探测“嫦娥五号”轨道器电源分系统图
4 结论和启示
国内外开展的深空探测电源控制器的比较总结如表5 所示。
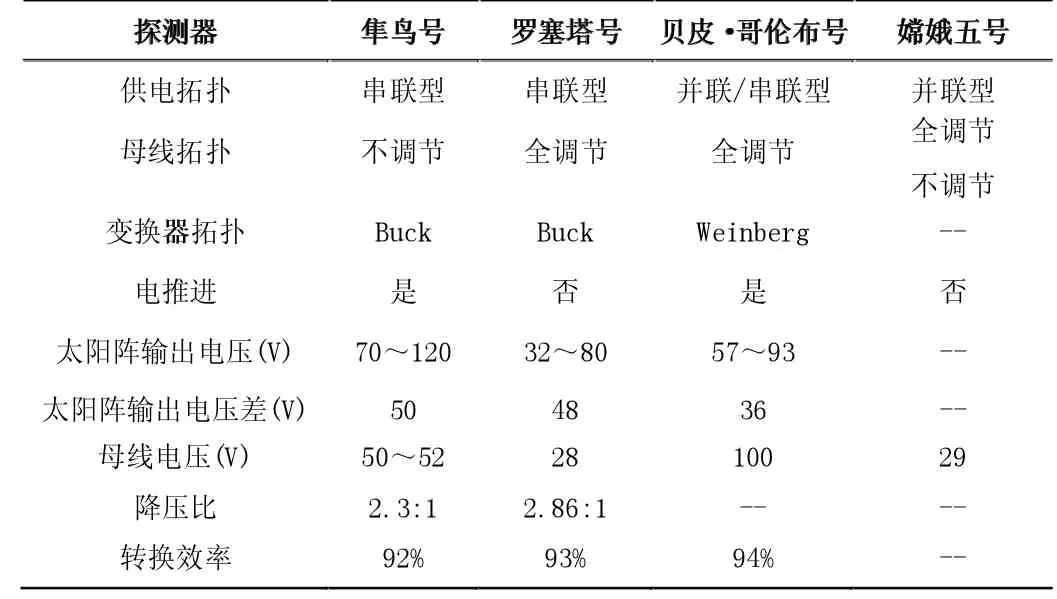
表5 国内外电源控制器方案及输入条件对比
通过表格的对比分析,可以得出小天体探测器的电源控制器启示如下:
4.1 串/并联型供电拓扑选择
远距离小天体探测任务距离跨度大,太阳电池阵输出电压即变换器输入电压,受光照和温度影响呈现宽电压范围。地球轨道航天器传统采用的并联型供电拓扑难以兼顾初期近日点和末期远日点的供电需求,会造成分流支路的冗余,增加电源系统质量,增加热控系统的散热问题。因此,太阳电池阵输出伏安特性曲线差异大的小天体探测任务,需采用串联型供电拓扑。
4.2 母线拓扑和数量选择
全调节、不调节和半调节母线拓扑选择主要影响光照期和地影期母线的电压波动范围、电磁兼容性(EMC)和输出阻抗。母线拓扑架构区别在于蓄电池组与母线间是否配置相应的充放电模块。设置充放电模块虽然减小了电能转换效率,但能减小母线电压纹波、增强EMC 特性、减小母线的输出阻抗。
母线数量的选择主要考虑适应不同特性的负载。电推进负载不同于传统平台负载,具有大功率和频繁开关的特点。双母线方式下,电推进负载单独供电能减小其开通关断过程中对传统平台负载的影响,同时高电压等级的电推进母线能更好满足其对大功率的需求。
4.3 变换器拓扑选择
串联型功率调节方式中的变换器连接太阳阵和母线,通常为DC/DC 变换器。当前国内外深空探测器在降压时采用成熟Buck 和Superbuck 拓扑;升压时采用Boost 和Weinberg 拓扑。然而单一的升压或降压型拓扑在电压变比增大时,直接能量传输比减小,电压转换效率降低,同时限制太阳阵串并联数设计的灵活性。因此,随着深空探测距离增加,小天体探测电源系统可采用升降压型拓扑。



