刘 元,李国伟,王新田,李丰翔,王观鹏
(山东省国土测绘院,山东 济南 250100)
水下地形测量一般指测量江河、湖泊、水库、港湾和近海水底点的平面位置和高程,用以绘制水下地形图的测绘工作,其成果一般是水下等高线图及水下数字高程模型(DEM)。其主要工作内容是建立控制网(如需要)、水深测量、水下地形点三维坐标测量、绘图和生成DEM 模型等。其与陆上常规地形测量相比,主要有三点不同:一是水下地形不可见且无明显特征点,所以不必进行详细地物测绘,一般需要按照一定间隔在测区布设测线测绘;二是水下地形点平面坐标和高程坐标系不同,在现行的测绘基准体系下,平面坐标一般要求为2000 国家大地坐标系下的投影坐标,而高程则一般要求为1985 国家高程基准下的正常高,或者归算到其他深度基准;三是水下地形点的坐标无法直接获取,需要经过一定的换算及改正,即需要后处理。平面测量和高程测量的精度、各项改正及换算的精度都是制约水下地形测量精度的决定性因素。
长期以来,为减少水深测量时潮汐的影响,需要在测区布设一定数量的验潮站进行水位观测,然后对测深数据进行改正[1]。随着全球卫星导航系统(GNSS)技术,尤其是北斗卫星导航(BDS)及区域连续运行基准站(CORS)技术的迅速发展,使得实时获取测量点的大地高高程变得简单,并且可以同时获得平面坐标,且具有较高的精度及稳定性[2-5],这使得无验潮模式成为近海及内陆水域较为常用的水深测量方法。相比于传统的验潮模式,无验潮模式具有全天候观测、实时快速测量、节省人工验潮成本、避免潮位观测误差、动态消除换能器吃水影响等诸多优势[6]。
1 无验潮模式水深测量原理及误差来源
无验潮模式水深测量系统是多种测量工具和软件的集合,一般包括GNSS 定位设备、水深测量设备、姿态仪、声速测量仪、导航及数据采集软件、数据后处理软件等。其测深的基本原理是,根据GNSS 天线测得的大地高及测深设备测得的水深,获得水下地形点大地高,再根据区域似大地水准面模型求得该点高程异常,进行归算,获取水下地形点正常高。在理想情况下(船体静止、天线及换能器连接杆与船体完全垂直、GNSS 测量与水深测量无时间差),水下地形点的平面坐标即为GNSS 天线测量时坐标。如图1 所示。
图1 中,h为换能器测量深度;h1为人工量取的天线高;h2为换能器吃水深度;H为水下地形面相对于深度基准面的标高;H1为GNSS 天线测得的大地高;H2为GNSS天线到深度基准面的距离;H3为深度基准面至参考椭球面的值。可得关系式为:
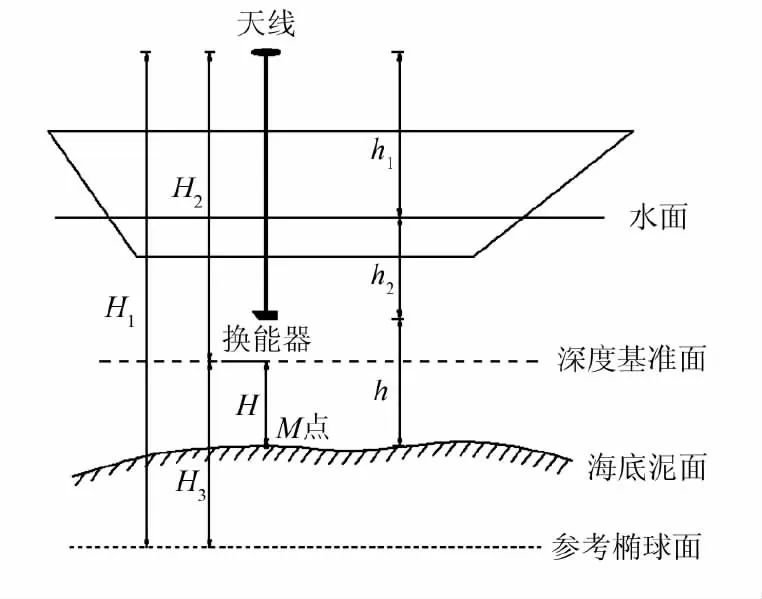
图1 无验潮水深测量原理

将式(1)代入式(2),水下地形面相对于理论深度基准面的标高为:

实际测量中,深度基准面即为似大地水准面,则H3即为高程异常ζ,式(2)可改写为:

由式(3)、式(4)分析可以得出,无验潮测深误差来源主要有以下几个方面:一是因波浪及风力引起测量船纵摇、横摇和艏摇,从而导致水下地形点平面位置及高程误差;二是GNSS 高程测量和换能器水深测量误差,若GNSS 天线和换能器的连接杆与船体安装不垂直、GNSS测量与水深测量有时间差等会引起误差;三是不同区域的高程异常值ζ不同,需要对测得的大地高进行高程精化,这个过程也会产生误差。
2 误差分析及控制
2.1 测量船姿态变化引起的误差
在水下地形测绘中,波浪及风力引起测量船纵摇、横摇和艏摇,对定位及测深精度影响很大。测船的姿态变化使换能器信号发射面的法线不能与深度基准面垂直,且影响水下地形点平面位置测量精度。
测量船姿态变化引起的误差属于随机误差,这种误差较难控制,也无法根除。通常需要借助姿态传感器进行修正。
2.2 GNSS 测量误差
以网络RTK 或者CORS 技术为例,GNSS 测量误差主要与仪器精度、多路径效应、测站与基准站间的距离、GNSS 卫星信号及通信网络信号质量等有关。在实测过程中,一般可以标称精度更高的、多频的GNSS 接收机来提高定位精度。
2.3 仪器安装不垂直的误差
如图2 所示,若换能器及天线连接杆与船体不垂直,将导致换能器所测水下地形点水深值与天线所测平面位置不对应,产生系统误差。另外,由于GNSS 天线安装不垂直而使所测大地高与实际值相比偏小。
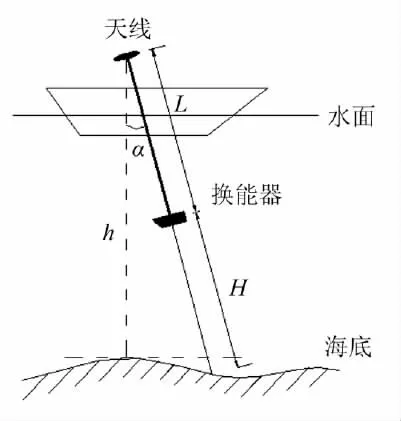
图2 仪器安装不垂直误差
如图2,仪器安装不垂直引起的误差为:

式中,L为天线相位中心到换能器中心距离,此值一般是固定的;H为换能器测得水深值;α为换能器杆安装偏角;h为天线到海底的实际高度。
由图2 可知,若换能器安装与船体有夹角,则测得的水深值比实际值要大,且误差与夹角成正比。
2.4 测深延迟效应
测深仪延迟是单波束测深仪的测深时间与GNSS 接收机瞬时记录时间不同步导致的误差[7]。测深延迟为系统性误差,作业开始前需实际测量测深仪声波信号滞后时间,利用相关误差改正软件等进行改正。
2.5 声速改正误差
一般测深仪测量水深的工作原理是通过换能器发射声波信号,并接收从水底反射的信号,记录接收时间间隔,再通过与水中的声速相乘来确定水深的。水流速度、水深、温度、气压等因素都会影响声波传播,所以在作业过程中多次准确测定声速,有利于提高水下地形点高程测量精度。
2.6 高程异常值计算误差
由于GNSS 天线测得的高程是大地高,因此经过归算后的水下地形点高程也是大地高,但是我国一般采用1985 国家高程基准,这就涉及高程精化问题。在不考虑GNSS 测量精度的前提下,高程精化误差主要来源于采用的已知点精度和拟合转换方法。
对于小范围地形变化不大的测区,不同点位高程异常之间的差异一般在厘米级以内,满足测深要求,这时可以认为高程异常ζ是一个常数,可在测区选取一定数量的GNSS 水准点,求取高程异常ζ。对于范围较大的测区,一般采用三种方法。一是选取适当的模型进行高程拟合,在地形变化不大的地区,采用多项式拟合法;在面积较大、地形较复杂的地区需要分区进行拟合[8]。实践证明,在已知点分布均匀、点位精度较高、拟合模型使用正确的情况下,高程异常值精度可达到厘米级。二是利用当地建立好的省级或者区域级似大地水准面高程精化模型,对测得水下地形点大地高进行后处理,即高程精化。三是利用EGM2008 重力场模型,对测得水下地形点大地高进行高程精化。多阶的EGM2008 重力场模型与其他模型相比,具有精度高、分辨率高、阶次多、拟合好等特点[9]。根据相关文献,基于EGM2008 重力场模型的无验潮测深精度可达厘米级,且不受区域、地形等因素限制,这进一步提高了无验潮测深精度和作业效率[10]。
3 结束语
本文阐述了水下地形测量的无验潮模式测深原理,并且分析了影响测量精度的多个因素,结合生产实践经验,可以得出以下结论。
(1)测量船姿态变化引起的误差对水下地形点的平面及高程测量都有影响,但属于随机误差,不易完全改正。所以,进行水下地形测量时要提前关注当地天气、风速、波浪等情况,尽量选择在较好天气条件下作业,测深仪尽量选择具有波浪补偿功能的设备。
(2)GNSS 测量误差对水下地形点的平面及高程测量都有影响,对高程观测影响尤为严重。测量前应对GNSS设备进行提前校检,并且选择双频或者多频接收机,提高测量精度。夏季作业时,应尽量避开电离层运动活跃的时段(如正午前后、雷电活动前后),以提高GNSS 测量精度。
(3)无验潮水深测量系统仪器安装误差对水下地形点的平面及高程测量都有影响,但此误差属于系统误差,可以尽量减小或者进行改正。作业时,应精密测量GNSS天线及换能器的连接杆与船体的几何位置关系,从而进行改正。必要时,应制作具有较强稳定性的连接杆及固定装置,以确保设备与船体在测量时不发生位移。设备应尽量安装在船只中部靠近船头的地方,避免船只发动机等设备产生的水花对测量产生影响。
(4)测深延迟效应一般只会影响水深测量,即水下地形点的高程,可通过实际测量测深仪声波信号滞后时间进行改正,或者采用具有改正功能的水深测量导航软件(如HYPACK 软件)进行减弱。
(5)声速改正误差影响水深测量,一般需要多次在作业前及作业中使用剖面声速仪测定工作区区域内瞬时声速数值,并补偿改正。
(6)高程异常值计算误差影响水下地形点由大地高精化为正常高,为提高高程精化精度,在较大区域内,可使用当地高程精化模型或者EMG2008 模型进行高程精化;在小区域内,可以采用均匀布设GNSS 水准点、选取合适精化模型等方法,提高精化精度。
(7)在一个测区测量结束后,应布设一定数量的与测线垂直的检测线,检测测量精度;对测得的水下地形点,要应用处理软件(如HYPACK 软件)进行粗差剔除、滤波和平滑等操作,提高成果精度。



