王圣哲,李 利
(1.海军大连舰艇学院 学员二大队学员八队,辽宁 大连 116018;2.海军大连舰艇学院 信息系统系,辽宁 大连 116018)
自从人类通过集装箱进行海上运输以来,集装箱在茫茫大海中能否顺利前行,其耐波性和载重性能否经受住大海的考验,成了长久以来广泛开展的话题。为确保集装箱的耐波性与载重性达到优值,通常采取增大船体船长和型宽的方法。与此同时,船艏外飘和方形船尾等影响船舶稳性的情况也可能出现。为确保船体安全,如何准确得到海洋平台作业海况下的水动力性能值成了问题的关键。
数值水池作为一种高精度虚拟试验,极大便利了大型船舶集装箱在正式下水前的试验工作。过往研究显示,评估海洋平台作业海况下的水动力性能,常进行物理水池试验,但是物理层面的研究往往伴随着长周期、大花费且收效较低,与此同时设计周期较长,在效益与产出方面十分不理想。与之相比,数值水池中的虚拟试验可以有效解决这些问题[1]。本文将运用数值水池思想,通过CAE软件进行船体网格绘算,在对比试验后从而解算最优值,为之后的海上平台性能评估提供参考。
1 基本原理
1.1 海上平台运动虚拟试验的水动力基本原理
在作业海况虚拟试验水池计算海洋平台水动力问题,建立平动坐标系oxyz。xoy平面为静水面,z轴垂直向上,无限水深,默认180°浪向为迎浪状态。
本作业海况虚拟试验水池是基于三维势流理论开发的。相较于传统方法,三维势流理论能够减少对自由面的网格离散,提高计算效率。
频域范畴内求解边界积分方程容易出现违背物理事实结果突变的“不规则”现象,为了消除该种不规则频率现象,本虚拟水池利用拓展积分区域方法,对海洋平台自由面加盖来消除此类现象,从而保证了结构的可靠性。
海洋平台是带有尖角的复杂几何体,并且在与自由面接触部分也同样存在尖角。这些角点处的诱导速度难以精确求解,评估海洋平台性能的波漂力中就含有这些项。为提高诱导速度场的计算精度,本虚拟水池采用泰勒展开边界元方法求解上述边界积分方程。在速度势及其诱导速度场求解完成后,可求解平台水动力系数,代入运动方程,求得平台运动RAO。在海洋平台湿表面上通过伯努利方程进行压力积分得到作用在平台上的一阶波浪载荷,用近场压力积分公式计算平台波漂力。
1.2 前提假设
研究船舶在波浪上的运动和载荷是以下列假定为前提的。
(1)船舶在静水中是稳定平衡的,即船舶的重量与静水浮力平衡,并且这种平衡是静稳定的。
(2)船舶在静水中航行时的定常阻力与推进装置产生的推力相互平衡,并且忽略推进装置对周围流场的扰动。
(3)船舶摇荡运动和操纵运动是可以分离的,互相没有干扰,并且认为船舶作等速直线运动。
因此,船体摇荡运动产生的水动力、波浪力以及因船体偏离平衡位置而产生的静水恢复力即为仅有的外力[2]。
另外,因为流体是不可压缩的,其不考虑粘性影响下的流动是无旋的,此结论所处的海洋环境满足势流理论假设。因而,流场内存在满足拉普拉斯方程的速度势[3]。
基于以上假设,本文用线性势流理论[4]来研究与计算海上平台的摇荡运动并进行分析。
2 虚拟试验测试内容和结果分析
2.1 试验工况和网格划分
假设给定试验工况数值。
(1)浪向:顶浪1 800、顶斜浪1 350。
(2)谱分析选用JONSWAP海浪谱:有义波高7.4 m,谱峰周期12.0 s,谱峰因子取2.4。
平台主尺寸信息见表1。

表1 平台主尺度信息
大型船舶集装箱在波浪中运动时其在自由液面中存在的拓扑结构极为复杂,传统网格划分技术无法与之匹配。重叠网格技术成为本例计算中的优选。
为使船舶的横摇运动被精准模拟,本算例在船体不同部位都做了针对性的局部网格加密;再根据不同部位进行针对性的网格细化,最终生成更加精细的网格[5-6]。考虑到网格生成后收敛性分析的需要,本算例在定义结果时也只需定义不同体积控制区域下的相对尺寸,此举极大减小了计算中的工作量。图1-图4为部分面元网格展示。
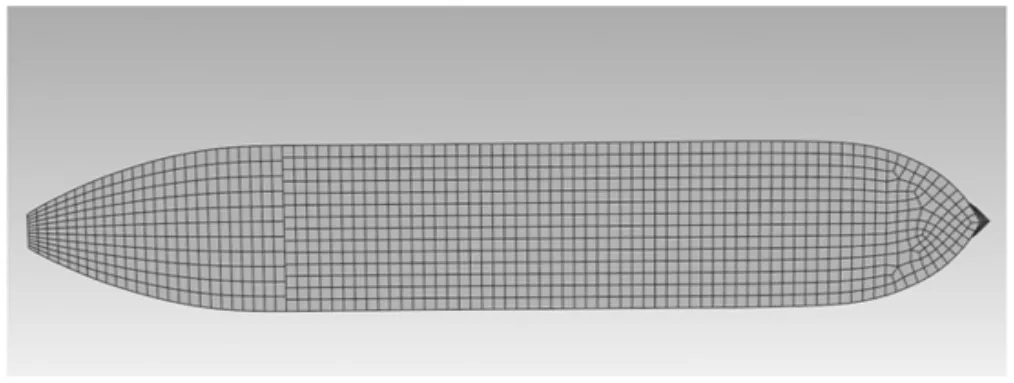
图1 船体网格示意图(船整体1)
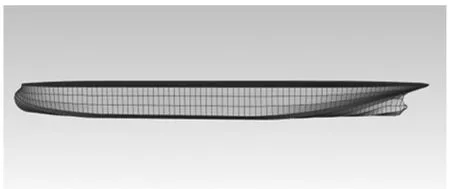
图4 船体网格示意图(船整体4)
2.2 收敛性比较
2.2.1 不同网格划分数量下的收敛性
通过对网格划分数量分别为2 490、3 292的船模在135°和180°浪向角下的计算结果进行分析,结果如图5-图8所示。图中横轴表示浪向角,纵轴表示浪高。

图2 船体网格示意图(船整体2)
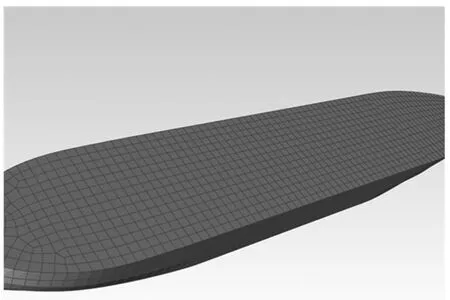
图3 船体网格示意图(船整体3)
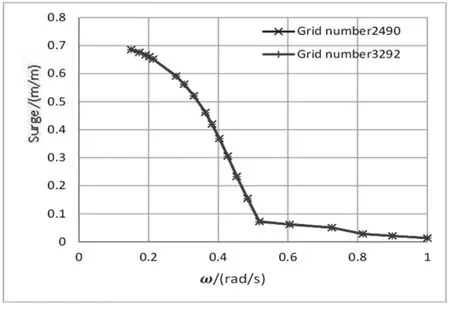
图5 135°浪向角下不同网格数量船模纵荡
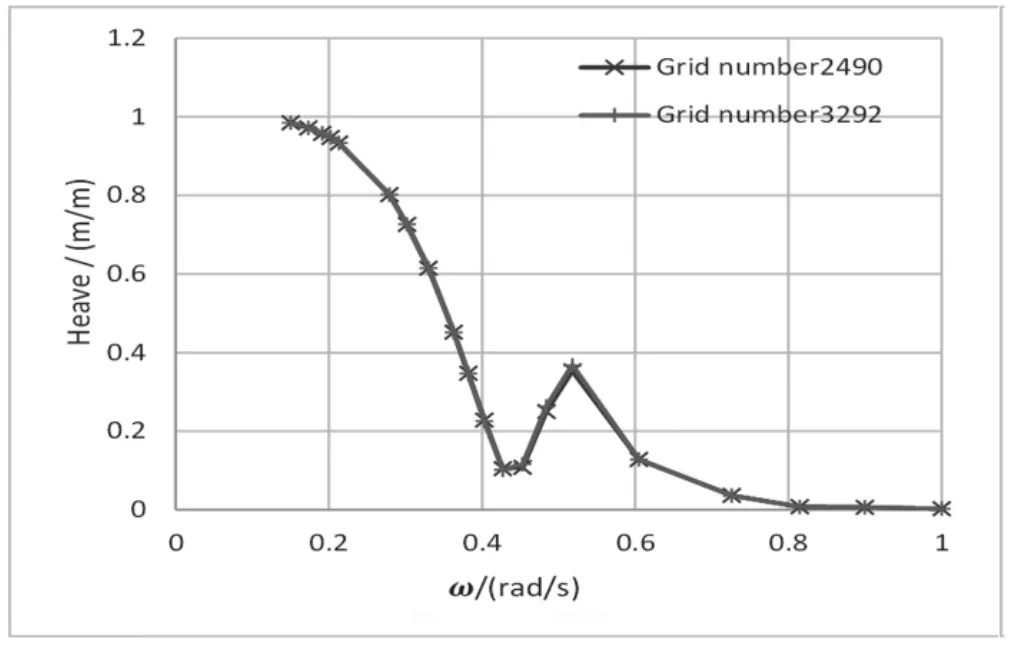
图8 180°浪向角下不同网格数量船模垂荡
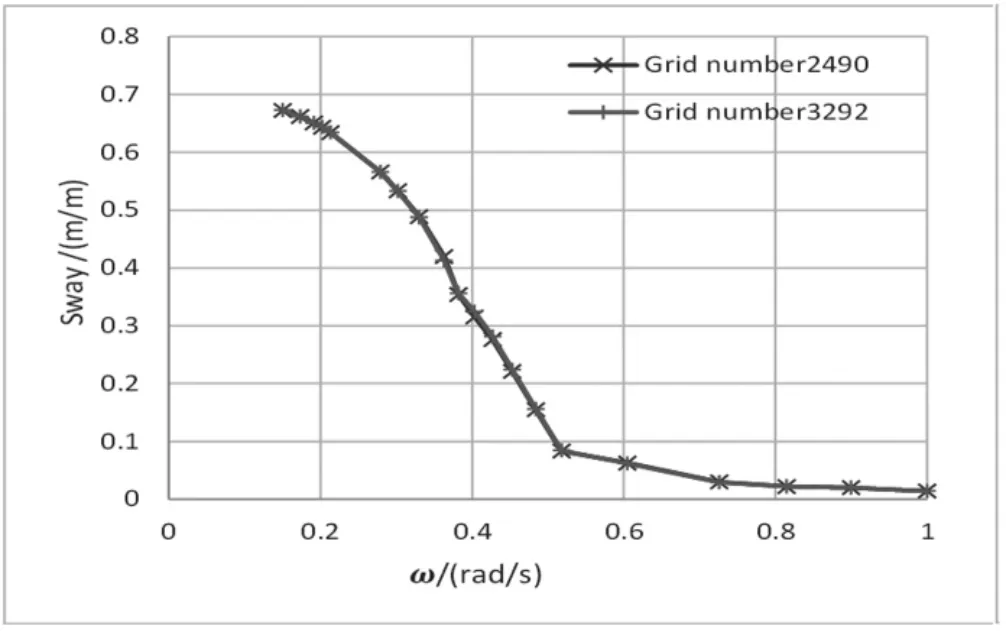
图6 135°浪向角下不同网格数量船模横荡

图7 180°浪向角下不同网格数量船模纵荡
通过分析比较135°及180°下2 490个网格和3 292个网格所展现的结果,可知随着网格越来越细密,所计算的离散误差也会随之减小。但与此同时因为网格变得细密,离散点的总数也开始变大,由此计算出的舍入误差变得增大。由此可知,在本例计算中计算结果并非单纯随网格数量的增多而变准确[7]。
2.2.2 不同海浪谱数量下的收敛性
通过对海浪谱数量分别为50、100、150,船模网格数固定为2 490的模型进行计算结果分析,结果见图9-图10。图中横轴表示浪向角,纵轴表示浪高。
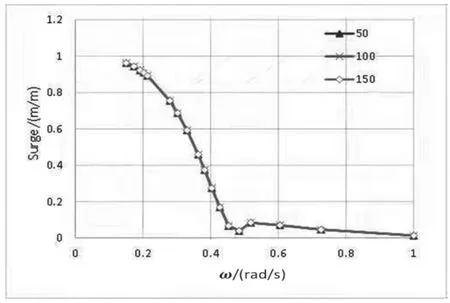
图9 180°浪向角下不同海浪谱数量船模纵荡
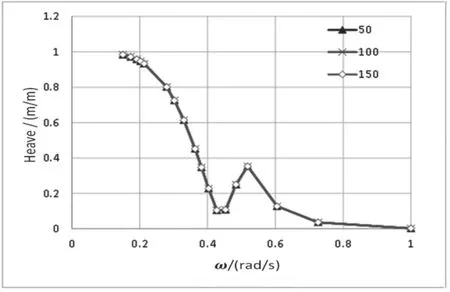
图10 180°浪向角下不同海浪谱数量船模垂荡
可以观察到,离散海浪谱50、100、150情况下计算出的结果差异性不明显,由此可以推断,不同海浪谱数量对于计算影响较小。在考虑计算质量和计算效率的前提下,当海浪谱取50时,选取数量较少且计算无偏差,可将其定为优值[8]。
3 结论
论文在虚拟试验平台建立船体模型后进行网格划分,重点对不同网格划分数量下的收敛性以及不同海浪谱数量下的收敛性进行分析。本文选取“2 490”网格数和“3 292”网格数进行比对,利用图形充分认知2种网格数目下的船体情况。通过上述同一船体在不同网格数下的多维多类型比较,可综合计算出利于船体海上平台运动的情景条件。随着虚拟试验条件的丰富与软硬件结合愈加有效,未来船体的海况平台运动将得到更为具体的计算和预演,这也将进一步确保船体自身的安全可靠性[9-10]。



