王霁云,铁雯婕
(1.苏州大学 计算机科学与技术学院,江苏 苏州 215006;2.苏州空天信息研究院,江苏 苏州 215128)
城市固体废弃物(以下简称“城市固废”)主要来源于城市日常建设和居民生活过程中产生的固体废物,与工业活动、城市设施建设和人员行为等密切相关。随着国内城市化进程的加快,城市固废的产生量迅速增长,对城市环境在土地占用、空气污染和水资源污染等方面均造成严重影响,如何对城市固废进行监测和识别是对于城市管理的巨大挑战,也是进行合理处置的重要前提。城市固废存在分布广泛、面积较小和随机性强的明显特点,采用传统实地调查的方式耗时耗力且很难做到全方位的快速监测,随着遥感技术的发展和遥感数据获取成本的不断降低,采用高分辨率光学卫星数据进行城市固废监测,能够充分发挥遥感卫星时效性强、覆盖面积大的特点,相比地面监测手段在城市固废监测准确性、成本方面均有明显优势。基于遥感卫星数据实现对城市固废的快速识别、提取,并进行常态化监测已成为新的发展趋势。
近年来,针对城市固废遥感监测应用,学者们先后提出多种考虑地物特征的遥感影像分类和目标检测算法。杨海平等[1]在多层优选尺度分割中考虑分割层全局标准差和对象面积权重因素确定最优分割尺度,结合Geo-Eye、ZY3卫星多光谱影像开展分割实验。邓志鹏等[2]利用形变卷积和形变池化操作提取具有尺度和方向变化的遥感影像目标信息,在实验中通过空间变换方法扩充数据集来验证密集目标的检测效果。林祥国等[3]综合利用分割和基于图的数学形态top-hat重建,采用形态学指数进行高分辨率遥感影像目标提取。秦海春[4]基于高分二号影像数据信息,以决策树分类方式建立垃圾堆的解译标志,区分影像的不同呈现效果。代沁伶[5]等提出一种结合区域多尺度遥感影像分割和马尔可夫随机场的分类方法,重点改善分类结果中“胡椒盐”现象,有效提高分类精度。Li等[6]提出一种基于全局空间信息的遥感影像自适应分割算法,在影像聚类算法处理中设置像素级信息熵权重,实现基于目标的遥感影像分割。Zhou等[7]提出一种自适应方法定义和估计最佳尺度的多尺度分割方法,通过迭代分割模式,结合影像特征和专题信息进行多层次多尺度影像分割。刘懿兰等[8]结合深度学习模型和条件随机场模型,基于深度卷积神经网络提取乡镇固体废弃物,在传统全卷积神经网络(FCN)基础上加入条件随机场模型(CRF)提取固体废弃物边界,提高整体分割精度。Cadau等[9]综合利用高分辨率遥感光学影像和合成孔径雷达影像对垃圾堆进行二维和三维监测,并基于反演温度计算提出垃圾堆监测指数DDI。同时,目前城市固废监测研究层面依然存在主观意识强、信息提取精度不高的问题,需结合面向对象特点和多种典型特征进行深层研究。
针对上述存在的问题,本文基于高分辨率光学卫星遥感影像数据,从影像目标检测的角度开展城市固废监测,采用异质度最小的区域合并算法进行遥感影像多尺度分割,获取工业、建筑、生活及装修垃圾等多种类型城市固废信息,为城市固废监测与治理提供技术支撑。
1 城市固废遥感信息提取方法
1.1 城市固废遥感解译特征
城市固废在遥感影像上的解译特征是指各种能够反映和表现城市固废地物信息的遥感影像特征,可以帮助判读者识别遥感影像上城市固废这类目标地物或现象。高分辨率光学影像数据的特征信息丰富,在利用面向对象技术进行地物信息的分类提取时,在利用传统直观的光谱特性之外,还需要利用纹理特征和形状特征[10],以及相邻地物的空间关系特征。
1.1.1 光谱特征
光谱特征是影像对象中最主要的特征,主要用来描述影像对象中各个像元在各波段上的统计特征,可根据多类地物特有的光谱特征进行地物识别,如城市固废光谱特征存在颜色发白、周边色调不一致等地物特征。光谱特征有很多,城市固废遥感监测中常用的主要有均值、亮度值、标准差和植被指数等。
(1)均值:指影像对象在某波段上的所有像素灰度值的均值,用来度量对象灰度值的集中趋势。
式中:n为像素个数;pik为k波段中第i个像素点的值。
(2)亮度(Brightness,公式中用B表示):对影像对象内所有波段的均值求平均值,用于多光谱影像和高光谱影像。
式中:m为影像波段数量。
(3)标准差:从所有像素的影像层强度值计算得到标准差,即对象内多波段亮度值的标准差值,表示波段内像素值的离散程度。
式中:σ为标准差;M为整幅影像k波段的均值;j为像素点。
(4)归一化植被指数(NDVI,公式中用NDVI表示):遥感影像近红外通道与红色通道反射率之差与之和的商,反映土地覆盖植被状况。
式中:NIR为近红外波段的反射值(公式中用NIR)表示;R为红色波段的反射值。
1.1.2 纹理特征
纹理特征作为遥感影像的重要特征,是复杂视觉实体或子模式的组合,每种地物所呈现的纹理都有自己的特点。在遥感影像分类应用中,基于灰度共生矩阵的纹理提取方法比较广泛。灰度共生矩阵建立在影像估计二阶组合条件概率密度基础上,计算影像中有一定距离和方向的2点灰度相关性反映影像在方向、间隔、变化幅度及快慢上的综合信息。灰度共生矩阵不能直接用来描述纹理,在其基础上导出反映矩阵特征的参数。
(1)对比度(CON,公式中用CON表示):影像视觉效果的清晰程度度量,反映影像的清晰度和纹理的深浅程度。
(2)同质性(HOM,公式中用HOM表示):度量对象内灰度分布均匀性。
(3)相关性(COR,公式中用COR表示):灰度共生矩阵元素间在行或列方向上的相似程度。
(4)二阶矩(公式中用AG表示):描述灰度分布的均匀性,反映影像灰度分布均匀程度和纹理粗细度。
(5)熵值(ENT,公式中用ENT表示):度量信息总量,反映纹理复杂度。
1.1.3 形状特征
形状特征是对光谱特征的补充,是在提取对象边界点的基础上形成的,反映对象的几何特征。当光谱特征相近而形状有差别时,利用形状特征可以更好地实现分类。形状特征主要包括面积、长宽比、密度和形状指数等。在分析遥感影像形状特征时,可进行语义特性分析,即表征城市固废与其周围地物的语义关系,如住宅密集区不相交性、生活垃圾与居民周围空地的邻接空间关系等。
(1)面积(公式中用A表示):面积用来表征对象大小,在影像空间分辨率确定的基础上,面积即为影像的像元总数量。
式中:a为像素元。
(2)长宽比(公式中用r表示):对象外接椭圆的长宽比,用协方差矩阵特征值的较大值与较小值的比值表示。
式中:l、w是长度和宽度;eig1(S)、eig2(S)是协方差矩阵S的较大值和较小值。
(3)密度(Density,公式中用D表示):体现对象像素在空间的分布,表示对象内部紧致程度。
式中:n是像元数量;Var为方差(公式中用Var表示),则Var(X)、Var(Y)表示2个坐标对应的方差。
(4)形状指数(公式中用Si表示):描述影像对象边界的平滑程度。
式中:e是对象边界长度;A是对象面积。
1.2 遥感影像多尺度分割
对遥感影像进行多尺度分割,使单一空间分辨率的遥感影像通过多尺度来表征信息。经过多个分割尺度进行影像分割后,形成影像对象层次体系,影像对象包含像元的光谱信息、此像元附件空间关系信息等,影像层级由分割尺度参数决定。1个对象层有1个固定尺度值,多个对象层不固定1个尺度值,而是体现了多种空间尺度的地物类别属性,不同属性的类别信息在不同尺度对象层进行有效区分。
多尺度图像分割是一种自下而上的分割算法,在本文中采用了异质度最小的区域合并算法,从影像中单个像元开始,根据像元对象异质度最小的原则,对单个像元与其相邻像元进行合并,形成多个影像对象,影像对象的集合构成分割的结果。分割过程中所使用特征参数包括光谱特征、纹理特征和形状特征,通过设置分割尺度、波段权重等参数对图像进行分割。多尺度分割的主要参数包含:分割尺度、波段权重和一致性准则。具体处理流程如图1所示。
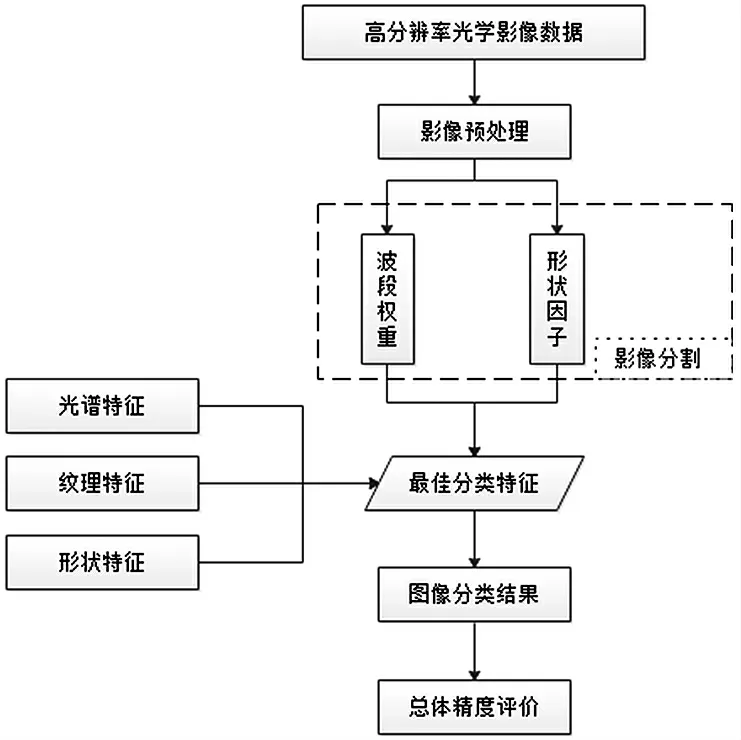
图1 基于多尺度分割的城市固废监测技术流程
城市固废内部结构复杂,有很强的异质性。异质度分割基于遥感影像的光谱特征和形状特征来判断多尺度分割中2个影像对象之间是否为同一区域。在遥感影像表征中,光谱和形状之间呈现互补关系,分割参数设置包括光谱因子与形状因子2个部分,形状因子又包含光滑度与紧致度。
1.2.1 光谱异质度
光谱异质度用影像中所有像素灰度的标准差来计算
式中:n表示参与图像分割多光谱波段的总数量;wi表示第i波段的权重值;σi表示图像第i波段灰度值的标准差。
1.2.2 形状异质度
形状异质度由形状光滑度和形状紧致度组成。

式中:hsmooth和hcomp分别为影像的平滑度因子和紧致度因子;wsmooth和wcomp分别表示平滑度因子的权重值和紧致度因子的权重值。
1.2.3 影像整体异质度

式中:wc和ws分别表示光谱因子的权重值和形状因子的权重值;hc和hs分别表示光谱异质度因子和形状异质度因子。
在不同层级分割尺度的选择中,通过计算各个尺度下影像同质度的局部方差变化率来进行设置,变换率值最大即为最佳分割尺度,这样保证地物分割边界清晰。同时,分割层叠加层级影响数据处理时间,需根据具体影像对分割层级进行调整。
2 实验与分析
2.1 实验数据
本文实验区域为山东省济南市北部区域,实验范围横跨黄河两岸,南起小清河、北至徒骇河、西起玉符河、东至临港办事处东边界,面积约800 km2,区域内环境复杂、地物多样,具有一定代表性。所做城市固废遥感监测成果配合当地的城市管理工作。
实验所用光学卫星数据选取高分二号全色和多光谱数据,影像获取时间为2021年8月份。高分二号卫星于2014年8月19日成功发射,是我国自主研制的首颗空间分辨率优于1 m的民用光学遥感卫星,突破了亚米级、大幅宽成像技术。卫星搭载有2台高分辨率1 m全色和4 m多光谱相机,星下点空间分辨率可达0.8 m。实验过程中所采用的数字高程模型(DEM)数据为SRTM DEM,数据空间分辨率为30 m。
2.2 处理结果
对高分二号全色和多光谱数据进行预处理,获得经校正、融合等处理后得到正射产品。在此基础上,综合利用高分二号融合影像光谱、纹理和形状特征进行异质度计算和多尺度分割。在实验过程中经对比选取适当的处理参数,相应的参数设置分别为分割尺度100、光谱因子和形状因子权重系数各为0.5。经处理后,共提取城市固废图斑281处。
所提取城市固废分为4种类型,其中工业固废36处、建筑渣土157处、生活垃圾73处及装修(大件)垃圾15处;各类城市固废提取总面积为2812184.3 m2,详见表1。
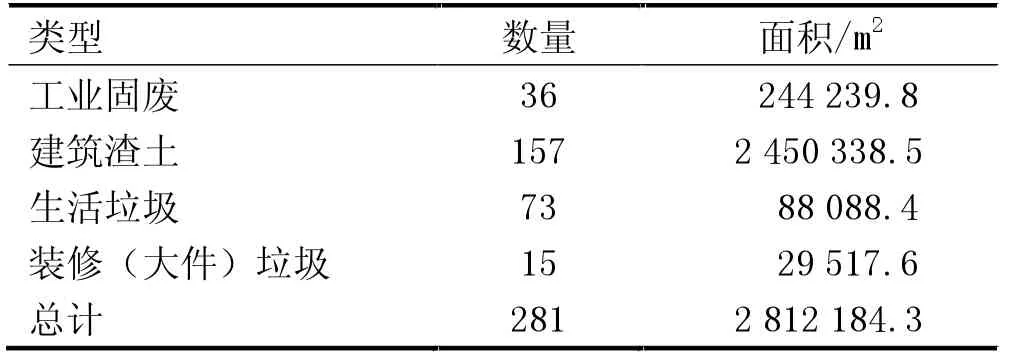
表1 城市固废提取图斑统计表
从本文城市固废遥感信息提取方法的处理应用结果来看,高分辨率光学卫星影像能够作为有效数据源来进行城市固废提取工作,随着卫星地面分辨率、侦照频率的不断提升和遥感影像的不断积累,能够进一步提升方法的检测准确性,有效提高城市管理水平。
3 结束语
随着遥感卫星数量的增加和成像质量的提升,遥感数据应用领域逐渐拓展到多个行业。遥感卫星数据应用作为高技术手段,能够充分弥补传统城市要素监测方式的不足,适应于多类城市管理应用场景的需求。
本研究针对高分辨率遥感影像空间信息丰富的特点,依据对城市固废影像特征和尺度效应的分析,提出一种面向对象的多尺度遥感监测方法。实验结果表明,该方法采用高分二号融合影像数据,针对具体影像和待提取要素的特性,能够有效改善影像分割结果。同时,由于城市固废自身的复杂性,本文所提出的城市固废遥感监测方法在提取精度还有待进一步提高。后期可基于多期、多分辨率影像信息,细化城市固废分类特征,从而提高提取精度。



