朱永杰,崔向阳,雷张华
(西安电子工程研究所,西安 710140)
随着中国民航事业的建设不断推进,航班量递增,我国航空器的数量在不断增加,雷达管制系统的压力也在不断增加,为了顺应形势的发展,亟需研究出新一代空管二次雷达。为避免研制过程中人力、财力的浪费,可通过仿真技术,设计二次雷达仿真软件,降低研制成本,缩短二次雷达的研究周期,加速二次雷达的发展。
2020年,Walt[1]提出基于测试软件的A/C 模式二次雷达仿真方法,通过使用真实的雷达模拟源,可使待测试设备的检测效果不受影响;2021年,Minteuan 等[2]提出了单脉冲二次监视雷达覆盖面积决定因素,给出一种改进的单脉冲二次雷达(MSSR)天线的设计和辐射方向图,突出SUM 波束的水平和垂直因素。此外,还评估了信号反射和大气折射等其他决定因素对雷达覆盖的影响。2012年,安晓东等[3]对二次雷达系统干扰识别方法进行了仿真研究,采用了干扰伪随机码相位调制法进行仿真,验证了干扰敌我识别(IFF)伪随机相位调制方法的有效性和可行性;2017年,姜鹏等[4]创建了二次雷达数据仿真系统,得到雷达目标与雷达站之间的距离和方向等仿真数据。
1 二次雷达仿真软件需求研究
1.1 A/C 模式二次雷达仿真用途
二次雷达仿真软件的设计框架如图1所示,在航空器数据输入端、雷达数据输入端设置相关参数,二次雷达仿真软件通过算法进行二次雷达功能仿真,最后输出航空器的高度识别码及航空器识别码,与正确数据进行对照,给出最终仿真结果。

图1 二次雷达仿真软件框架
1.2 二次雷达A/C 仿真功能需求
二次雷达仿真软件大概有以下几个功能。
(1)场景设置功能。拥有多个参数设置面板,设置航空器参数,包括航空器经纬度、倾斜角度。可以设置二次雷达的相关参数,包括雷达俯仰角、经纬度、天线转动周期、询问射频最大探测距离高度、雷达开启时间和扇区总数目等。
(2)具备仿真功能的控制功能,包括开始仿真、停止仿真等功能。开始仿真,触发此指令,仿真软件开始读取输入的数据并开始运行;停止仿真,触发此指令,仿真软件结束数据读取并停止运行。
2 二次雷达仿真软件总体方案设计
二次雷达仿真系统要具备航空器高度及航空器代码识别功能,在输入端输入相关的数据,经过仿真软件的计算最终可反馈出航空器的应答机识别码和高度识别码及真实的高度。基于以上功能需求分析,仿真软件将采用MVC 架构格式,方便进行软件管理。MVC 架构被分为模型(Mode)、视图(View)和控制器(Controller)3个部分,其优势是可以实现Mode 和View 2 部分模块分离,实现Mode 和View 中相关的数据同步。
在本架构中,Mode 部分主要用于储存数据和演示算法,以实现使用该框架设计软件的功能。View 则为人机界面,是仿真软件提供给操作者参数设置、数据输入的重要接口,同时软件也将通过View 将软件运行的结果反馈给用户。Controller 用于联系Mode 和View,当View 发出指令后,依靠Controller 将数据传送给Mode,最后再将Mode 作用结果传回View 反馈给操作者。
如图2所示,在View 部分,将进行人机界面的设计,包括以下参数设置:扇区总数目、飞机识别码脉冲时序(用于检验飞机识别码功能)、天线转动周期、雷达启动时间、雷达纬度、雷达经度、雷达询问机高度、航空器纬度和航空器经度。同时View 部分将输出航空器的识别码、高度识别码及高度。
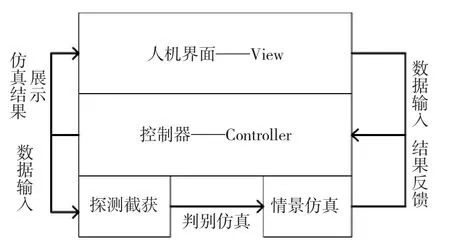
图2 二次雷达仿真软件MVC 构架
在Controller 部分,将View 部分输入的数据通过Controller 传输到Mode 部分,同时每当View 中的数据发生变化时,会及时地将更新的数据传输到Mode 部分。
在Mode 部分,设置探测截获、情景仿真2 个模块,探测截获模块负责识别输入的航空器是否可以被雷达识别,而情景仿真模块则用于数据分析,最后仿真的结果由本模块负责。
整体的仿真工作流程大概如下:操作者输入数据以后,点击开始仿真按钮,仿真开始,Controller 模块将View 中的数据传输给Mode 进行处理,通过模块的调用判断该航空器是否可以识别,最后在计算后将结果通过人机界面反馈给操作者,将高度识别码、航空器识别码展示给用户。
3 二次雷达仿真软件设计
3.1 人机模块设计
3.1.1 设计思路
本模块的主要作用是提供不同的配置参数设置,输入的参数包括雷达询问机的信息、航空器的信息。通过输入航空器的飞机识别码脉冲时序(用于测验识别码翻译功能)、航空器高度所处环境气压(用于计算航空器高度)、航空器纬度和航空器经度这些数据来描述航空器;对于雷达询问机的拟化,则通过输入雷达经度、雷达纬度、雷达高度、最大探测距离(一般规章给出,航路340 km、终端区150 km)和雷达俯仰角来描述。
为了方便设计人机界面,使用MATLAB 的M 文件存储雷达询问机数据,由操作者直接输入航空器数据,当操作者需要更改雷达询问机数据时,不读取M 文件,直接由输入端人机界面进行配置。
3.1.2 模块的实现
利用MATLAB 软件设计人机界面图形用户界面(GUI)功能面板,利用GUI 程序中的UIPANEL 控件,区分人机界面的不同输入面板,使得操作者可以很清楚直观地在不同的面板输入自己设置的仿真参数。同时通过在面板内的多个设置EDIT 可编辑文本框控件,这是操作者输入数据的实际载体。操作者输入的字符类数据,通过MATLAB 中GUI 的Get 函数,可获取操作者输入的相关参数,并通过Str2double 函数,将输入的文本类字符串转换成可供本仿真软件设计算法使用的字符类数据。
3.2 探测截获模块设计
3.2.1 信号工作原理
探测截获模块根据人机界面传输而来的雷达询问机信息、航空器信息,并通过询问机的询问机制,根据设计的算法进行实现,判定障碍物是否可以被拦截。
其工作流程如下:询问机按照A/C 模式发射询问信号,询问信号跟随所设置的雷达的天线转动轴周期,按照一定的俯仰角度发射出去。如果在雷达询问机的工作范围内存在雷达应答机,并且询问机发射的功率要大于应答机的接收灵敏度,在这种情况下,航空器应答机会返回一个A/C 模式的应答信号。应答机返回的信号被询问机接收,应答机返回的信号功率如果大于询问机接收信号的灵敏度,则会进入信号的解码流程。
3.2.2 仿真算法设计原理
功能仿真工作流程如图3所示。

图3 功能仿真流程
(1)探测开始以后,访问操作者在人机界面通过参数设置雷达。
(2)计算当前所访问的雷达处于的扇区。
(3)根据输入的航空器高度气压信息进行高度转换。
(4)截获计算。
若符合截获条件,进入仿真模块开始仿真;若探测结果不符合截获条件,则返回气压高度转换流程,重新进入探测流程;探测成功以后,探测模块工作流程结束。程序进入仿真模块。
3.3 仿真模块设计
3.3.1 A/C 模式的二次雷达工作原理
(1)传统模式的询问信号。对于A/C 模式二次雷达,其主要功能体现在高度码的转换和识别码的编译。因此在实际的应用中,传统模式二次雷达,亦称为空管A/C 模式二次雷达。雷达A 模式主要用于航空器的识别码识别,C 模式主要实现航空器高度转换。凭借不同间隔、不同的脉冲信号对应的不同的编码方式,来实现雷达系统不同模式的实际应用。不同模式的信号脉冲都由P1、P2 和P3 这3 个脉冲组成,在雷达的不同询问模式下,P1—P3 的脉冲间隔存在明显不同。
因为询问信号中P1、P3 脉冲的主要作用是询问,所以把这2 个脉冲也称为询问脉冲。在航空器的日常使用中,当使用一种模式的时候只会产生该模式下唯一的信号,当使用雷达的多种询问模式的时候,地面设备会产生多种模式的询问信号。
(2)传统模式的应答信号。应答模式下产生的应答信号编码,称之为二次雷达的A/C 模式应答信号编码。询问机发射的信号经由应答机处理完毕后,自动返回一串应答脉冲信号,实现对地面设备询问内容的答复。
3.3.2 模块的实现
航空器识别码的仿真主要基于其二-八进制的转换,而对于空管二次雷达高度码功能的实现,又因为高度码具有很多的排列,所以本软件将航空器高度的对应高度码翻译输出,以实现二次雷达的C 模式识别仿真功能。
4 仿真结果分析
(1)雷达参数设置见表1。
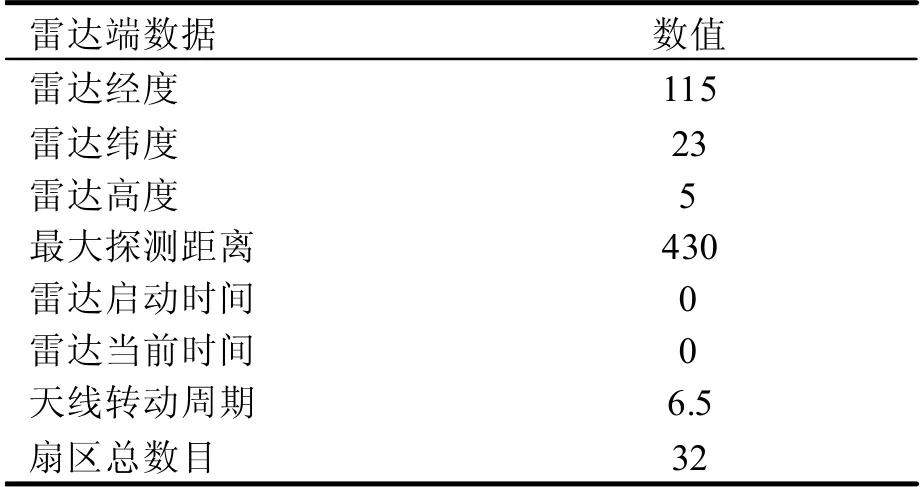
表1 雷达参数
(2)航空器参数设置见表2。

表2 航空器参数
(3)航空器仿真结果展示图如图4所示。

图4 航空器仿真结果
5 结束语
本论文对二次雷达仿真及应用研究有重大意义,主要进行了仿真软件的设计,其中分别对人机模块、探测模块和仿真模块进行了流程规划及算法设计,使得软件具备高度码、识别码及实际扫描功能。配置雷达及航空器的相关仿真参数,并进行仿真实验,成功实现了雷达航空器识别码及高度码等相关参数的输出,同时实现了平面显示器(PPI)显示器扫描,完成了仿真软件仿真结果的展示。



