张广辉,陈大国
(中国电建集团贵阳勘测设计研究院有限公司,贵州 贵阳 550081)
水库提水泵站控制系统设计及优化对工程建成后的运行管理和运行安全可靠性起到决定作用。目前,水库提水泵站控制系统多采用定频运行方式,随着技术的进步和设备价格的降低,变频调速技术因为具有高效节能、稳定可靠、自动化程度高等特点逐渐在工程中得到广泛应用。
目前,水库水源提水泵站设计中变频调速控制系统普遍采用人工设置运行频率控制方式和根据水泵运行曲线恒流量控制方式,但是贵州省很多水利工程提水泵站兼有灌溉供水功能,实际运行中具有非线性、不确定性的特点,难以建立精确模型,PID恒流量控制方式和定参数控制方式不适合这种类型的工程。为了保证供水的稳定性和可靠性,有必要研究适用于以上工况的控制方式以减轻运行人员工作量并提供高供水质量。
模糊控制技术基于专家知识和运行人员经验,应用模糊集合理论和方法把操作人员的经验总结成模糊规则模型,只要在线检测系统给出期望输出与实际输出之间的偏差,通过判断调整因子的趋势来确定调整因子的大小,然后代入模糊自调整公式来设置所有参数。其简洁性和可实现性正适用于以上实际工程需要。
1 模糊控制系统构成
常规的PID控制系统数学模型为:
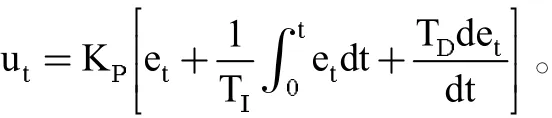
考虑到传输装置位置式PID对过去状态的依赖,设计中采用增量式PID控制方式,每次输出只输出控制增量:

其中:kp=KP,ki=KP/Ti,kd=KP·Td。
常规PID控制的首要任务是要确定精确数学模型参数,但由于该类工程的特点,很难确定精确的数学模型参数。模糊控制将人的操作经验归纳为若干控制规则,从而可以避开复杂的数学模型。由于模糊控制的非线性特点,对于非线性、大滞后及带有随机干扰的供水工程,模糊控制能做到较稳定的控制,并且对于对象的参数变化适应性强,即所谓的“鲁棒性”较好。
模糊控制系统通常由五部分组成:模糊控制器、输入/输出接口、执行器、被控对象和测量装置[1]。其构成如图1所示。该系统属于一个双闭环控制结构,内环是一个fuzzy-PID控制器,根据给定水位Fgi去控制变频器改变水泵电动机转速,使其水位Fi控制在理想的给定值Fgi附近。外环根据高位水池水位实际值和期望之差ΔPi来修正内环的给定值。
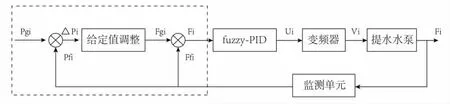
图1 控制系统结构图
2 模糊PID控制算法
将操作人员长期积累的经验转换为模糊控制器的规则,是根据人们的直觉推理出的一种语言形式,可以有利于控制非线性、大滞后对象,并且能够更好地应用于不清楚或参数时变的数学模型,以及传统的PID控制算法应用效果不理想的地方。由一系列关系词相连而成的模糊规则,通常与误差e和误差变化率ec作为信号输入,这样我们就可以满足不同时间的e和ec参数自我调整的要求,PID参数自调整模糊控制规则在线对三个参数自调整控制框图如图2所示。
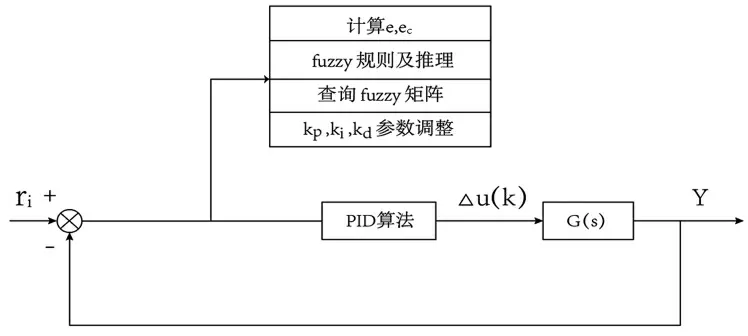
图2 模糊PID控制结构图
根据水源提水工程自身特点,建立kp、ki、kd的fuzzy控制规则见表1-表3。
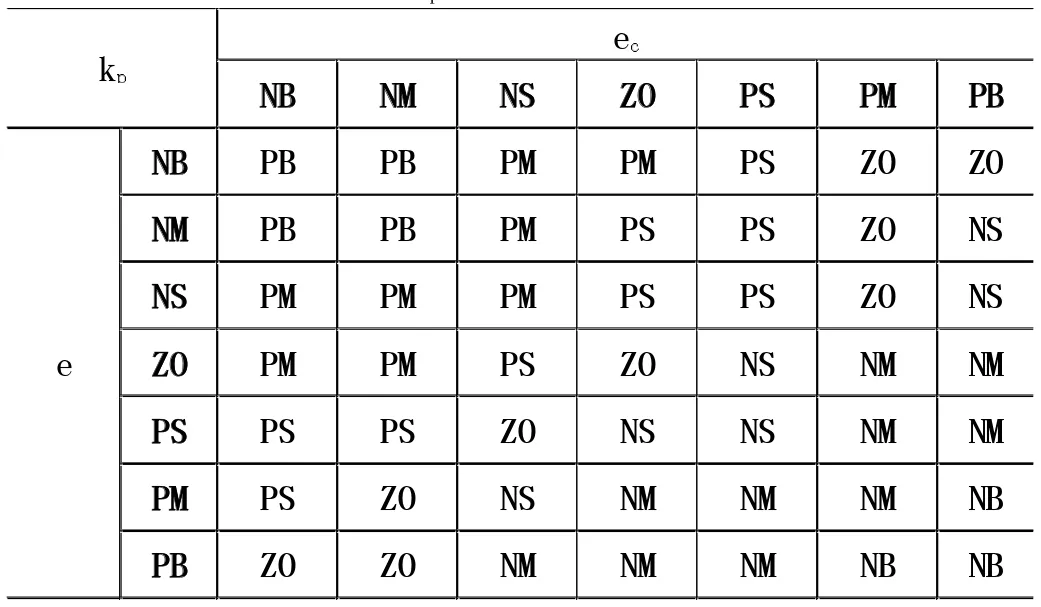
表1 kp模糊控制规则表
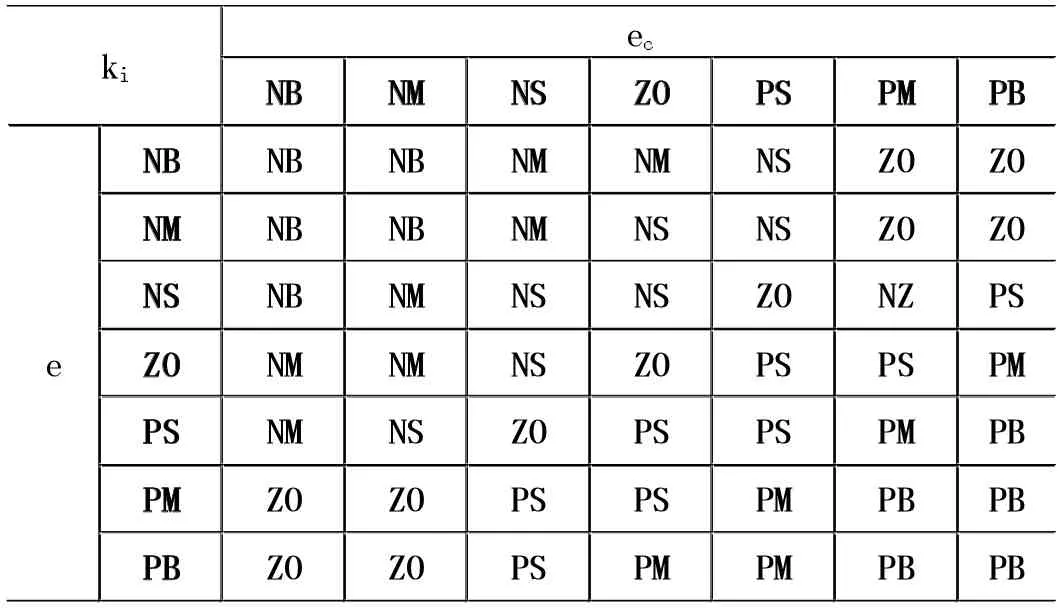
表2 ki模糊控制规则表
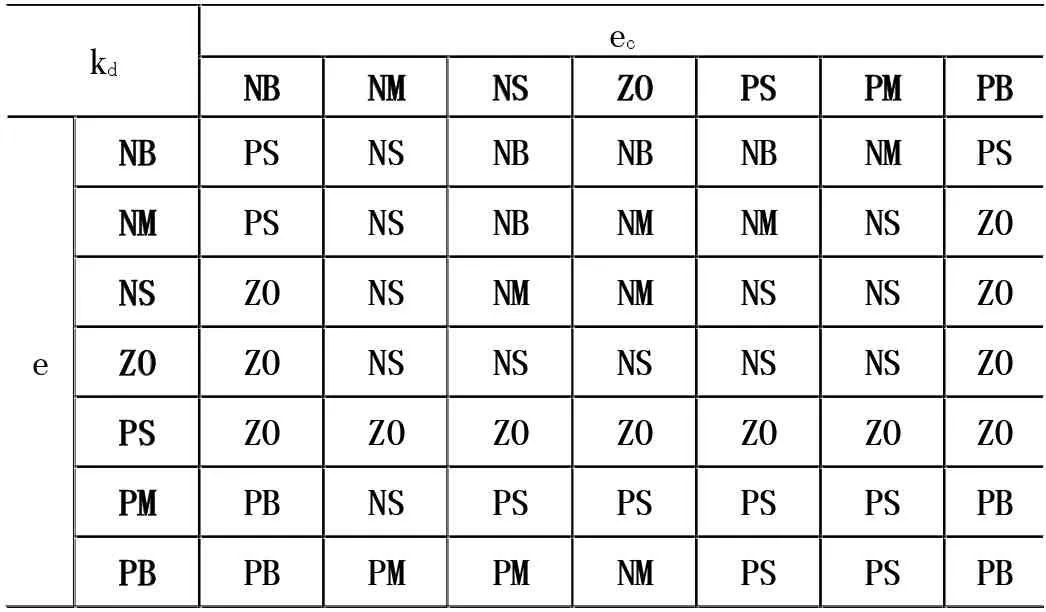
表3 kd模糊控制规则表
3 控制系统的实现
模糊控制方法可以通过PLC[2]实现,具体方法是通过水位监测装置对高位水池实际水位与一个给定的水位值进行对比,水位误差e、误差变化率ec作为模糊控制器的输入,模糊后形成使用模糊语言来描述的模糊集,之后综合模糊控制器控制规则推理输出量增加值。积分后,通过反模糊化给出速度控制的精确值,送变频器控制泵的转速,通过不断调整直至水位稳定在设计水位。
以箐口水库提水泵站为例,工程主要任务为城镇供水、兼顾农村人畜及农田灌溉用水。工程配置水泵4台,其中1台水泵可采用高压变频系统实现水泵软启动及转速调节,其余水泵采用定频运行方式,变频泵的转速随水位的变化动态调节,限制最高运行频率为工频(不超频运行)。当变频水泵转速达到额定转速,在设定时间延迟后,池高水位若不能满足设定水位,系统自动开启定频水泵以补充需水量。当用水高峰期过后,将依次定频泵退出运行。控制系统流程图如图3所示。
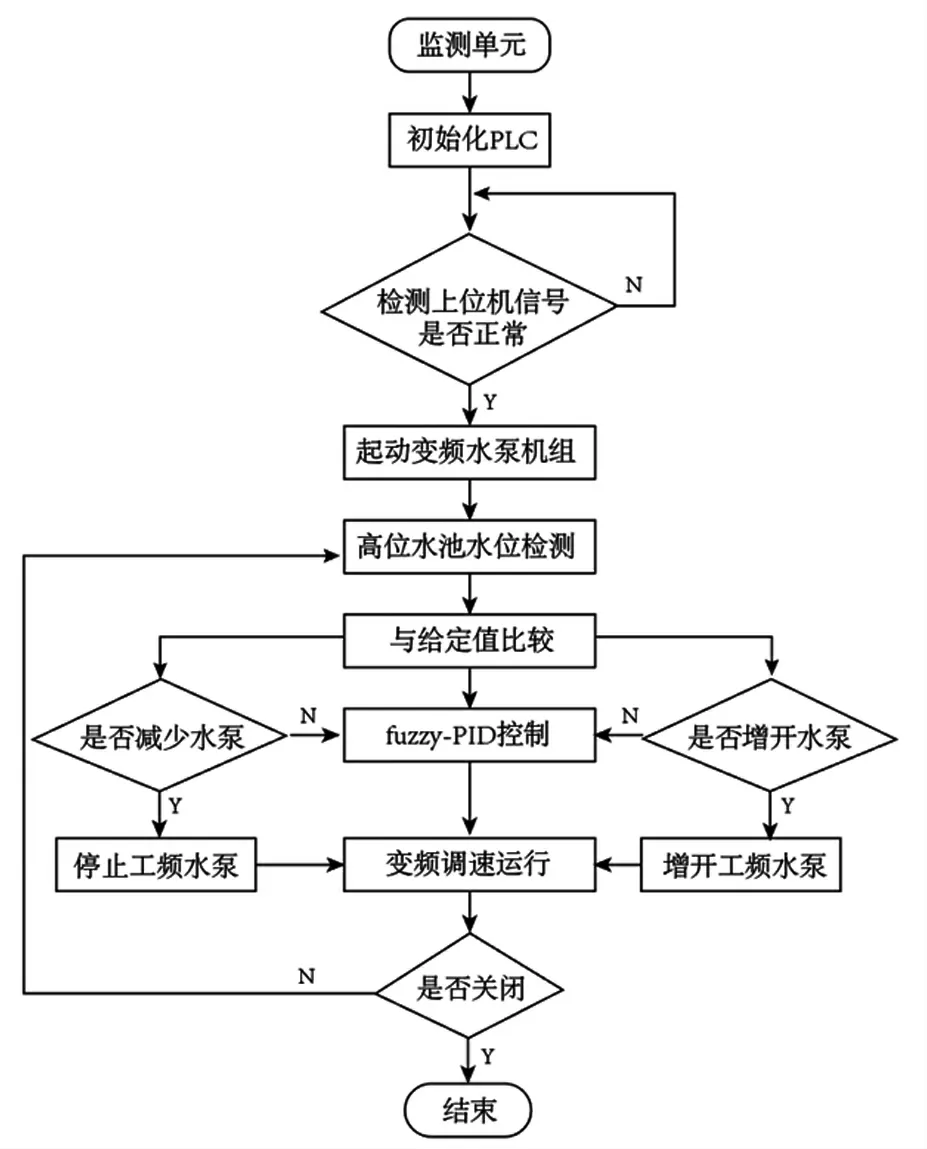
图3 控制系统流程图
4 控制算法的MATLAB仿真研究
参考文献资料,变频器的传递函数假定为小惯性环节,变频环节使用下述传递函数[3]:
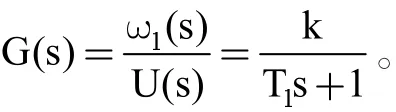
异步电机的传递函数可以描述[4]为:
水泵管道环节传递函数描述[5]为:
分别采用传统PID算法和模糊PID算法对阶跃信号进行跟踪。仿真结果如图4所示。由此可见,模糊控制对于提水控制系统能够达到理想的控制目标。通过以上仿真实验表明,模糊控制与PID控制相结合的系统响应曲线几乎没有超调,且系统的响应时间相对较短,是一种鲁棒性较强的控制器。可见若将该控制应用于提水系统可以使系统平稳运行,减少运行人员工作量。仿真结果表明,将模糊控制应用于PID控制器的设计,能在线调整PID的3个参数kp、ki、kd,能很好地满足系统的要求。
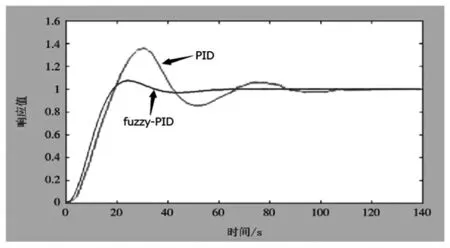
图4 simulink仿真对比图



