王小丽,王春来*,王 斐,刘俊龙
(1.广州南方测绘科技股份有限公司,广州 510663;2.东方通用航空摄影有限公司,太原 030031)
近年来,随着技术的发展及IMU-GPS 组合导航系统的位置和姿态精度不断提高的同时,其生产成本也大幅度下降,使IMU-GPS 组合导航技术的普及应用成为可能。基于IMU-GPS 组合导航的免像控航空摄影测量技术成为国内应用和研究的热点[1-4]。但是对比近几年国内研究文献[5-10],发现其采用的方法均为国外和国内的GPS 动态后处理(PPK)技术,针对国内IMU-GPS组合导航系统的应用研究较少。
川气东送二线天然气管道工程项目,采用了国产IMU-GPS 组合导航的免像控航空摄影测量技术,完成了长度487 km,面积487 km2航空摄影和激光雷达数据的获取,并完成了数字表面模型(DSM)和数字正射影像图(DOM)成果的制作。文章选取了其中44 km2的数据进行实验,最终证明,免像控航空摄影测量技术方法不仅快捷高效,而且精度可靠。同时说明,国产TWX-09B 型组合导航系统不仅可靠稳定而且精度高,达到甚至超过了国际领先水平。
1 IMU-GPS 组合导航技术
惯性导航系统(INS)的组成由陀螺仪、加速度计及相关的辅助电路构成,简称惯性测量单元(IMU)。IMU高精度惯性测量单元,不依赖于任何外界信息连续长时间自主导航,可以提供多种导航信息如位置、速度、航程、航向、水平基准和方位基准,且精度可靠。
IMU-GPS 组合导航把无线电导航长期精度高与惯性导航短期精度高和不受干扰的优点结合了起来,因此,GPS 与IMU 的组合被认为是导航领域最佳的组合方式。
将IMU-GPS 组合导航系统与激光雷达、航摄仪紧密固连,可准确测定航摄仪和激光雷达的姿态参数,通过对IMU、GPS 数据进行联合解算,可快速获取每张航片高精度的外方位元素和激光雷达中心的实时位置及姿态信息。
2 SZT-R1000 移动测量系统
移动测量系统(Mobile Mapping System,MMS),集成了全球定位系统、惯性导航、三维激光扫描仪、影像系统和里程计等传感器的移动测量系统,是当今测绘界最前沿的技术之一,代表着未来测绘领域的发展主流。SZT-R1000 移动测量系统,是南方测绘控股子公司征图三维(北京)激光技术有限公司研发,作为一款高性能的移动测量系统,集成了RIEGL VUX-1LR22 激光扫描仪,一台1 亿像素的Phase 相机,并搭载了中国航天33 所的TWX-09B 型IMU-GPS 组合导航系统。
RIEGL VUX-1LR22 是一款轻便小巧的机载激光雷达,可以搭载在多种平台上,轻松应对各种项目。RIEGL VUX-1LR22 的设计充分考虑了平台的特点,具体的约束和飞行特性,能以任意方向进行安装。其低功耗的特点,使得整个设备仅需采用单一电源供电,从而大大减轻了整个系统的重量,满足了平台苛刻的载荷要求。测量过程中获取的数据都保存在VUX-1LR22 内置的1 TB 固态硬盘上。基于RIEGL 独一无二的回波数字化和在线波形处理技术VUX-1LR22 可实现高精度的激光测量,即使在大气条件不佳的情况下也可以获得高质量的测量结果,并且可识别多目标回波。VUX-1LR22 采用超高速旋转镜扫描,产生完全线性、单向、平行的扫描线,进而获得极好的均匀分布的点云数据。RIEFL VUX-LR22 激光扫描仪最大激光发射频率为1 500 KHZ,最大视场角360°,可接收无穷次回波,测量速率200 线/s,最大测距为1 845 m。
Phase One 是世界领先的中画幅数码摄影系统及专为摄影师提供成像解决方案和工业应用的供应商。Phase 相机因其畸变小、像素高、稳定性好等优点,被广泛应用到航空摄影测量中,其主要技术参数如下。面阵尺寸:53.4 mm×40.4 mm;像元大小:4.6 μm;像素数:8 708×11 608;感光度(ISO):35~800;曝光时间:最快可达1/4 000s;焦距:40 mm;最快曝光速度:2 s/幅。
中国航天33 所的TWX-09B 型IMU-GPS 组合导航系统,是中国航天集团自主研发的航天级别的组合导航系统,其主要参数指标见表1。

表1 TWX-09B 型IMU-GPS 组合导航系统主要精度表
3 搭载平台
实验测区选用美国罗宾逊R44 直升机作为航测平台。美国罗宾逊直升机公司生产的R44 轻型直升机于1996 年正式投入市场,因其广泛的通用性,得到了世界各地的认可,其特点为灵活机动,安全系数高。日常巡航速度可达180 km/h,最大航程达640 km,最大爬升率超过4 000 m。经过对测区最大高差的分析评估,试验区选择罗宾逊R44 直升机可满足航摄要求。
4 航飞注意事项
飞行期间机载GPS 接收机最小采样间隔不应大于1 s。
起降场地应避免附近有高大树木或建筑物等遮挡,以免造成GPS 卫星信号失锁。
飞机上升、下降速率不大于10 m/s,以免造成GPS卫星信号失锁;航线弯曲度一般不大于1%,当航线长度小于5 km 时,航线弯曲度不大于3%。
在一条航线上连续达到或接近最大航偏角的像片数不应大于3 片;在一个测区内出现最大旋偏角的像片数不应大于测区像片总数的4%。
为避免IMU 误差积累,每次直线飞行时间不宜大于30 min,以25 min 为佳。
航摄飞行过程中应及时观察系统工作情况,重点观察POS 系统信号状况、回波接收状况、数据质量状况和实时天气状况,根据实际情况及时处理或记录出现的问题,决定是否当场补摄或重飞。
5 实验技术流程
本文以SZT-R1000 移动测量系统的IMU-GPS 组合导航技术为基础,对获取的同组影像数据,按照不同处理方式进行数据加工,对比实验结果,验证了多种方式下的免像控航空摄影测量成果的平面及高程精度。第一组实验是基于获取航片的高精度位置信息,进行免像控高密度点云数据和DOM 生产;第二组实验是基于航片的高精度位置及姿态信息,进行免像控高密度点云数据和DOM 生产。最终分析2 种免像控模式下生成的高密度点云数据和DOM 数据的高程和平面精度。
5.1 数据获取
测试区域面积44 km2,采用有人直升机R44 搭载SZT-R1000 移动测量系统进行影像和激光雷达数据获取。数据获取时SZT-R1000 移动测量系统的参数设置见表2。

表2 SZT-R1000 移动测量系统的参数设置
5.2 数据加工流程
DOM/DSM 生产需要的资料包括原始航片、POS数据。DOM/DSM 生产的总体工艺流程如下。
在Global Mapper 软件中叠加POS,按照航线进行挑片处理,去除影像过密区域,转弯掉头区域影像,尽量保证相片覆盖大于摄区范围。
利用影像匀光GeoDodging 软件对原始影像进行云光匀色处理。
利用Agisoft Metashape 软件导入匀色后的影像和pos 进行空三处理,生成密集点云,生成DSM 和DOM。
利用Global Mapper 对DOM 进行分幅裁切,对不同加密分区分幅影像进行接边处理,确保各个加密分区之间DOM 无缝衔接。再对拼接、整饰合格的影像数据开展分幅裁切,按照出图要求,生成合格产品。DOM数据的具体生产工艺流程如图1 所示。
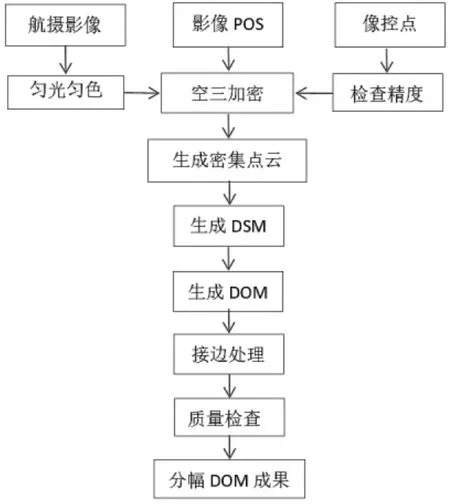
图1 DOM 生产流程图
5.3 2 种模式生产DOM/DSM 精度分析
按照基于高精度位置信息免像控生产DOM/DSM和基于高精度位置及姿态信息免像控生产DOM/DSM的2 种模式,分别对外业采集的764 张航片进行数据加工,数据加工采用Agisoft Metashape 软件进行,最终部分处理报告如图2 所示。
图2 中影像摄影中心z值误差用椭圆颜色来表示,x/y误差用椭圆形状来表示,从空三报告中的影像位置误差评估图可以看出,2 种免像控模式下z值误差最大值均不大于2.5 cm,x/y的误差均小于z值的误差,从而说明国产国产TWX-09B 型组合导航系统的轨迹经过事后差分处理的位置和姿态精度均小于2.5 cm,达到国际领先水平。
表3 中可以看出,基于高精度位置及姿态信息免像控生产DOM 的方法,平面精度均优于基于高精度位置信息免像控生产DOM 的方法,且2 种模式空三后的平面位置精度均优于1 cm。
通过RTK 采集的40 个已知特征点的平面和高程数据,分别和2 种模式下生产的DOM/DSM 进行对比,基于高精度位置及姿态信息免像控生产DOM/DSM 的方法,DOM 统计中误差为±0.13 m,DSM 统计中误差为±0.23 m;基于高精度位置信息免像控生产DOM/DSM 的方法,DOM 统计中误差为±0.17 m,DSM 统计中误差为±0.56m。2 种模式生产的DSM 效果图如图3 所示。

图3 2 种模式生产DSM 效果图
6 结论
2 种模式免像控技术生产的DOM 数据,平面精度相差不大,均能满足国家大比例尺航测规范要求;但基于高精度位置及姿态信息免像控技术生产DSM 数据的高程精度优于基于高精度位置信息免像控技术,且基于高精度位置及姿态信息免像控技术生产DSM 数据更接近于激光雷达实测的高程值,并满足国家大比例尺航测规范要求。同时说明国产IMU-GPS 组合导航系统的精度可靠、稳定,达到甚至优于国外同类产品的精度水平。
7 结束语
实验证明基于国产TWX-09B 型IMU-GPS 组合导航系统免像控航空摄影测量技术,平面精度高,能满足国家大比例尺航测规范要求。对基于高精度位置、姿态信息免像控技术生产DOM/DSM 测量技术的推广,具有一定的指导意义。将改变长期以来航空摄影测量严重依赖地面像控的现状,免像控技术的推广将大幅缩短制图周期、解决森林、高山、沙漠和水域等人迹罕至地区快速获取大比例尺基础地理信息的难题,有利于新型基础测绘和实景三维中国的建设需求,有利于国家经济的快速发展。



