朱昊杰 魏万行 任志贵 梁 杨
(陕西理工大学 机械工程学院,陕西 汉中723000)
元胡,又名玄胡、延胡索,扁球状、色黄、直径约0.5-2.5cm 之间,为大宗常用中药,有活血化瘀、行气止痛的作用。当前元胡种植面积已经实现大规模但目前元胡收获仍主要采用手工收获,收获效率低且成本昂贵,因此,开发出一种适合元胡收获的自动化机械,不仅可以提高元胡的收获效率,还能极大的降低元胡的收获成本。元胡收获机械的设计,首先应该设计出良好的元胡攫取装置。元胡推土铲的作业性能取决于土壤环境,元胡收获机与和推土铲的连接结构,挖掘深度,收获速度,入土角等有关。为提高收获效率,元胡攫取推土铲的工作性能改进目标应该以减少收获阻力为主[1-2]。
传统的田间试验因为过于费时费力,且不易改变相关参数。现采用EDEM离散元[3]软件,构造模拟实验所需土槽。相关研究表明在构造相关研究结果表明,离散元技术是一种模拟土壤和机械相互作用的有效分析方法。EDEM 软件是一种可以研究不连续体问题的离散元软件,通过比较真实的模拟土壤颗粒与收获装置的相关工作,有效的仿真模拟土壤剪切、破碎、混合、移动等非连续现象,通过EDEM所带的后处理分析功能可以得出攫取装置的工作阻力[4]。
现设计一种元胡攫取推土铲,通过EDEM建立离散元仿真模[5],研究不同收获速度,不同入土角的收获阻力,选出合适的收获工作状态[6]。
1 元胡攫取推土铲的设计
1.1 结构组成
现设计一种可调节的元胡收获机推土铲,包括铲板,所述铲板两端分别固定焊接有两个侧板,所述两个侧板的一侧分别与铲板的两端通孔连接,下通孔为圆弧形可调节连接孔,可以通过不同连接方式调节不同的入土角,铲板的一个侧边均匀设置有方形铲齿,所述方形铲齿之间的凹槽处还设置有长孔活动通孔连接铲板和铲齿,通过调节通孔连接位置可以调节挖掘深度。

图1 可调节元胡推土铲
1.2 参数确定
可调节元胡推土铲的主要参数包含铲板长度L, 铲板宽度B,圆弧形活动连接孔调节角度r,铲齿与铲板可调节连接孔长度l,方形铲齿宽度b,方形铲齿长度h。根据元胡收获机械的尺寸设置铲铲板长度L=210mm,铲板宽度B=1400mm。圆弧形可调节连接孔角度 取值范围为20°~30°之间,可以通过调节侧板与铲板的圆弧形连接孔连接位置,调节铲板入土角度入土角度。铲齿与铲板可调节连接孔长度l=15mm。可以通过铲齿与铲板可调节连接孔的连接位置调节挖掘深度。铲板上分布12 个方形铲齿,铲齿宽度B=50mm,长度h=95mm。通过给铲板增加活动铲齿增加破土能力。
2 EDEM 离散元仿真实验
2.1 离散元模型的建立
由于元胡收获过程时元胡推土铲与土壤的相对速度较低,且土壤之间具有粘结力,因此土壤和元胡推土铲作用选择软球模型。本研究采用Hertz-Mindlin 相关理论建立土壤颗粒与双翼式深松铲离散元仿真模型。根据Hertz 接触理论,仿真模型中相关参数可通过剪切模量G(pa)及杨氏弹性模量E 计算求出,且在碰撞过程中将颗粒视为各向同性材料。
根据材料力学可知,剪切模量G(pa)、杨氏弹性模量E 和泊松比v',给出其中2 个参数即可确定第3 个参数[7],仿真参数如表1 所示。

表1 仿真模型主要参数
2.2 仿真实验设计
影响元胡推土铲工作性能的参数可以分为结构参数与工作参数两种。进行仿真试验时,将元胡推土铲收获时的工作阻力作为实验目的。保证挖掘深度d=80mm 不变,以入土角度α,掘进速度υ 为实验因素,进行仿真模拟实验。入土角度α 分别采取20°、25°、30°三个水平,掘进速度υ 分别采取0.7m/s、1.1m/s、1.5m/s 三个水平。首先使用Creo 创建可调节元胡推土铲三维立体模型,用IGES 将其导出保存。每组仿真实验开始后,然后将此模型导入EDEM中,并进行相关试验参数的设置,然后进行仿真实验。
2.3 实验过程
首先打开EDEM2018 软件选择New project 创建新文件,在Bulk Material 中设置土壤颗粒相关参数,在Equipment Material中设置元胡推土铲相关参数,然后在Geometries 中创建土槽,设置颗粒工厂生产土壤。等土壤颗粒生成完毕。再进入analyst 中选择File 中的Export 选项Simulation Deck 导出土壤模型。在新导出的土壤模型中,再geometries 导入元胡推土铲IGS 模型,设置入土角,挖掘深度,掘进速度之后开始进行仿真挖掘。仿真过程结束之后,进入EDEM软件的后处理模块,导出后处理结果。如此依次设置不同的工作因素,进行仿真实验。
3 仿真实验结果分析
3.1 实验数据处理
由于元胡推土铲开始进入和离开土壤模型是不满足挖掘深度条件,不满足仿真设计值,仿真数据不准确,因此进行设计数据处理时,选择符合运动状态的数据值。
3.2 实验结果
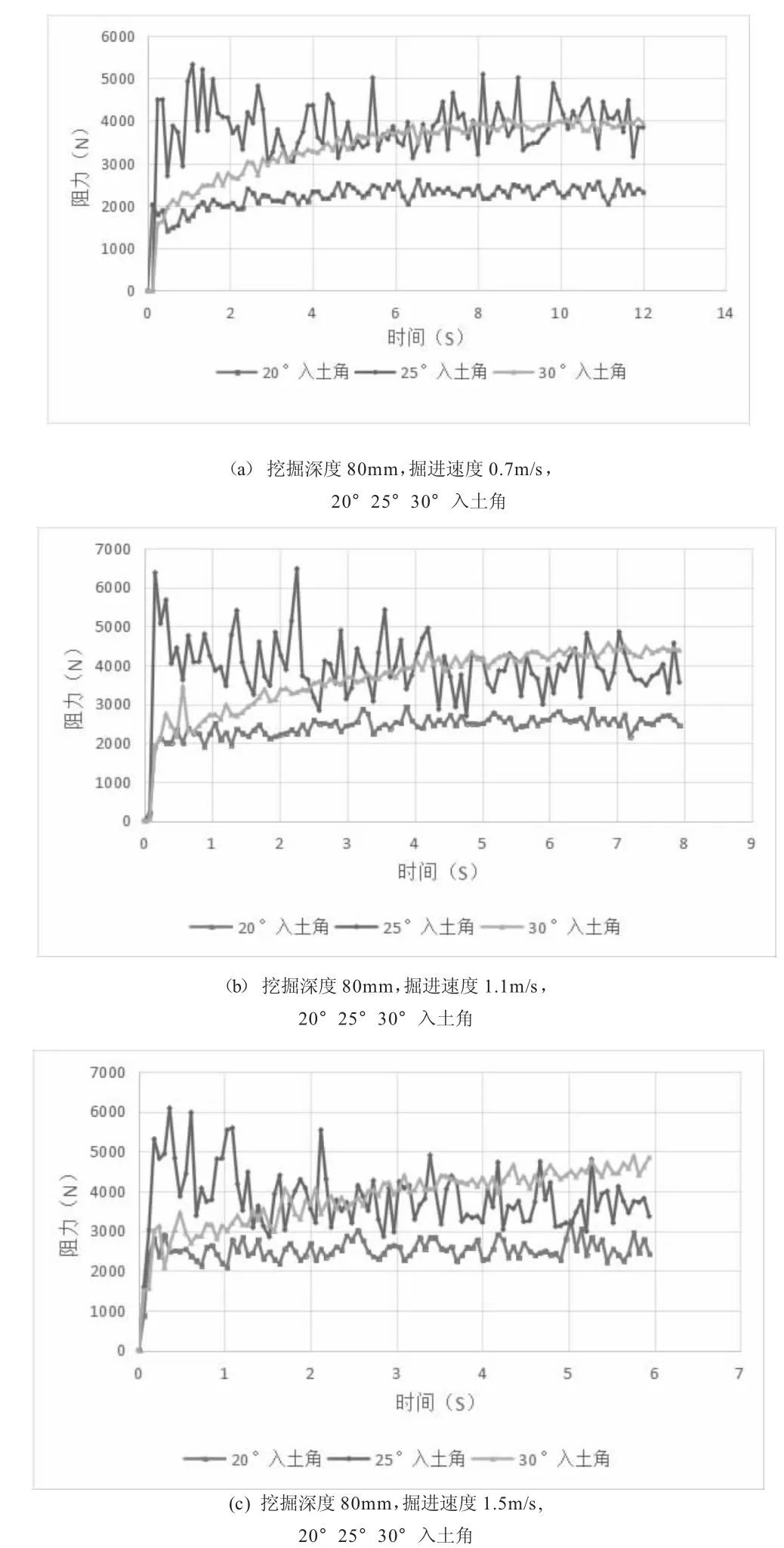
图2 元胡推土铲工作阻力仿真曲线

表2 仿真运动阻力平均值
当元胡推土铲以一定掘进速度运行,从进入土壤模型开始,工作阻力从0 开始增大,推土铲全部进入土壤模型中之后工作阻力逐渐上升,随着时间的推移逐渐趋于稳定。通过分析可得,在20°入土角时,分别在0.7m/s,1.1m/s,1.5m/s 的掘进速度下工作,平均工作阻力为分别为2236.746465N 和2427.624827N 和2514.481939N,在25°入土角时,分别在0.7m/s,1.1m/s,1.5m/s的掘进速度下工作,平均工作阻力为分别为3899.83N 和3980.612276N 和3854.298673N。在30°入土角时,分别在0.7m/s,1.1m/s,1.5m/s 的掘进速度下工作,平均工作阻力为分别为3389.018283N 和3683.119486N 和3850.018878N。
通过图像可以分析出25°入土角时,入土瞬间掘进阻力在三种不同掘进速度中是三个不同入土角入土瞬间掘进阻力最大的,且工作时掘进阻力变化波动最大。因此该种元胡攫取推土铲选择入土角不要选用25°入土角。选择30°入土角时,三种不同速度下平均工作阻力都比20°入土角时的平均工作阻力高1000N 以上。因此选用20°入土角工作为好。在20°入土角工作时,随着掘进速度增加工作阻力略有升高,1.1m/s 掘进速度相比0.7m/s 掘进速度平均阻力升高190.878362N,1.5m/s 掘进速度相比1.1m/s 掘进速度平均阻力升高86.857112。采用1.5m/s的掘进速度工作效率升高而且工作阻力较小。
4 结论
对元胡攫取推土铲进行计算机仿真实验,可以比较直观的表现出推土铲在不同入土角,不同掘进速度的运动状态与受力状态。可以发现此种元胡攫取推土铲在1.5m/s 掘进速度,20°入土角的工作状态下,工作阻力最小,工作效率最高且最早达到工作平稳状态。



