邢世波 李 盛 孙 唯 陶志豪 贾余晋 李嘉斌
(西京学院,陕西 西安710100)
1 总体设计
新型基于云平台的医疗平衡救护床系统可以实现人体的血氧浓度、心率、温度等相关生理数据采集,利用GPS 定位模块获取定位信息,并通过运用4G 网络通信模块,有效的把采集的信息与数据以云平台的形式透传送到远程医院从机上并进行显示。此外,通过陀螺仪测量出救护床的倾斜情况,并迅速将数据传给MCU 主控,最终通过程序算法给出舵机将要扭转的角度,继而实现医疗平衡救护床实时准确的自动平衡调节。
2 系统硬件设计
新型基于云平台的医疗平衡救护床系统,硬件主要包括中央控制器ARM控制芯片控制着整个系统单元;底盘运行电机驱动电路部分控制整个平台在地面的运行;平衡舵机控制电路是控制救护床的平衡;心率与血氧传感器电路负责采集病人的脉搏和心跳,人体温湿度传感器电路负责采集人体温度和温湿度;其次4G 通信电路将采集的数据通过云平台进行透传到远程监控从机,并可以通过从机和上位机进行串口通信进行上位机显示。
2.1 系统电源
采用ASM1117 电压调节芯片,运用该芯片能够有效的调节基准电压,从而利于控制系统误差,在调节过程能够有效的对电流进行限制,以更好地保障稳压器和电路的正常运行。在MP2539 把电压由12V 转到5V 之后,由开关K2 决定要不要给系统上电,确保系统的安全性。之后再经过ASM1117 电压转换芯片,能够将电压转换为3.3V,供传感器模块使用,C34 为极性电容起耦合和滤波作用。
2.2 脉搏血氧心率传感器模块
MAX30102 是一种集成了脉搏血氧仪和心率监测仪生物传感器的模块。它具有一个红外光LED、光电检测器,以及带环境光抑制的低噪声电子电路。
其使用的传感器由光源和光电变换器两部分组成,通过绑带或夹子固定在病人的手指、手腕或耳垂上。光源一般采用对动脉血中氧合血红蛋白(Hb02)和血红蛋白(Hb)有选择性的特定波长的发光。当光束透过人体外周血管,由于动脉搏动充血容积变化导致这束光的透光率发生改变,此时由光电变换器接收经人体组织反射的光线,转变为电信号并将其放大和输出。由于脉搏是随心脏的搏动而周期性变化的信号,动脉血管容积也周期性变化,因此光电变换器的电信号变化周期就是脉搏率。同时根据血氧饱和度的定义,其表示为:
SaO2=CHbO2CHbO2+CHb×100%
再通过标准的I2C 兼容的通信接口,可以将采集到的数值传给单片机进行心率和血氧计算。
2.3 ATK-M750 无线传输模块
ATK-M750 是一款高性能全网通4G DTU 产品。它以高速率、低延迟和无线透传作为核心功能,可快速解决应用场景下的无线透传方案,传输数据不受距离的限制。该产品支持多种工作模式:NET/HTTP/MQTT/RNDIS;支持接入云服务器平台:原子云/阿里云/百度云/OneNET;支持自动重连、掉线监测、内置看门狗、确保稳定可靠。
3 系统软件设计
系统软件主要包括传血氧浓度人体脉搏检测程序、存储程序、GPS 模块定位程序、底盘运行驱动程序、救护床平衡程序以及4G 模块通信程序,另一部分是通过远程监控手段,有效的监控主机端的各项软件以及数据。操作系统相关的软件设计框架如图1 所示:
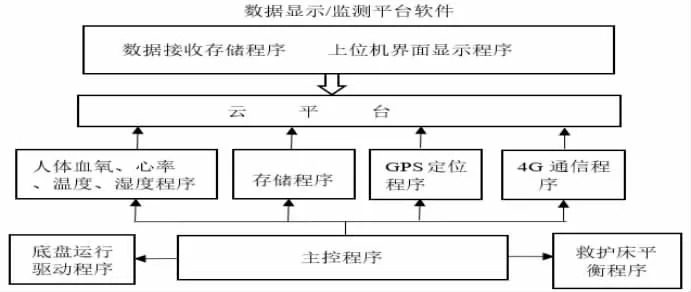
图1 系统软件设计框图
3.1 原子云平台
原子云即原子云服务器,也是现流行的物联网云服务平台,目前它可以实现数据的监控、转发和管理等功能。原子云域名为:cloud.alientek.com,端口号为:59666。用户可以选择启用原子云功能,快速的实现用户设备与原子云服务器的连接。可以通过以下条件来判断DTU 是否注册上原子云。
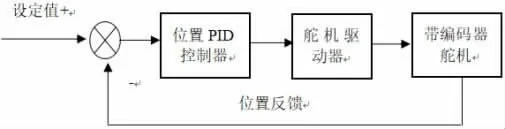
图2 位置PID 控制原理图
3.2 原子云配置步骤
想使用ATK-M750 连上原子云,首先我们需要对模块进行AT 指令配置,配置GPRS DTU 工作在网络透传模式,地址为cloud.alientek.com,端口号为59666,在上位机配置好后,就可以开始配置原子云服务器了。配置步骤如下:
3.2.1 登陆原子云服务器:https://cloud.alientek.com,创建设备节点。在“新增设备- 选择设备类型”中选择“LTE-DTU”类型。然后输入“设备名称和密码”,选择“新增”就可以成功创建一个设备。
3.2.2 配置DTU 的设备编号与设备密码参数。新增设备节点成功后,就能在设备节点列表中查看刚刚新增成功的设备节点,将上一步中新增的设备编号和设备密码填入上位机中就可以实现DTU 与原子云之间的连接。
3.2.3 创建两个分组。点击“创建分组”开始创建分组。由于透传是建立在组与组之间的,在创建分组后,还需要将设备节点分配到对应的分组中,一个分组下添加一个设备节点。在“设备管理”界面下,点击“分组操作”。
3.2.4 创建透传管理组。点击“创建透传组”开始创建透传组。在A 设备组和B 设备组下,分别选择需要透传的两个设备分组,然后在列表中选中需要透传的设备节点。最后点击“保存”,原子云就会在分组之间建立起数据透传关系。最后用户只需要将DTU 连接到原子云对应的设备节点上,就可以实现两个DTU 之间的数据透传。
3.3 位置PID 控制算法
这里我们引入了位置PID 算法,
Velocity1=Position_ PID1 (Positionl, Target1) ;
Position1+=velocity1;
TIM4->CCR1=Position1 ;
其中我们使用Velocity1 用于代表舵机的速度,这个值根据目标值和舵机的实际位置计算得到,然后以积累的方式,将赋值有效的作用到舵机,这样可以提高对于舵机的调节能力,利于控制PID 参数,从而保障运行效率。此外,在接近目标位置时,能够有效的实现减速,可以防止惯性因素造成的减速箱损耗问题发生。
根据位置式离散PID 公式
pwm=Kp*e(k)+∑e(k)+Kd[e(k)-e(k-1)]
int Position_PID (int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Encoder-Target; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*
(Bias-Last_Bias);
Last_Bias=Bias; //保存上一次偏差
return Pwm; //输出
4 结论
本设计针对目前老龄化的现状和医疗救护系统的迫切需求,设计一种新型基于云平台的医疗平衡救护床。这种新型平衡救护床不仅能够实现实时平衡,确保病人的运转安全,而且能够通过救护床上的血氧浓度人体脉搏传感器等多种生理监测设备对病员的生理参数进行实时监测,并将数据经由无线模块和云平台实时传输到远程计算机上并进行实时显示,以方便医生进行远程监测和病情监控。本设计的开展能够满足医院医疗救护的迫切需求,研发成果具有广阔的市场应用和产业化前景。



