张鑫瑞 夏 源 王艺华
(西安工业大学机电工程学院,陕西 西安710021)
滚动轴承是大型机械设备的主要构成元件,其运行性能对整个机械设备的运转状态有着极其关键的作用,如若发生故障,会造成的巨大的损失[1]。并且滚动轴承长期处于复杂恶劣环境,其运行状态监测困难。
目前,国内外的许多学者专家做了大量的研究对于故障诊断的模式分类的问题,主要有基于人工智能、基于知识、基于支持向量机的模式识别方法[2]。2004 年提出了一种新的故障识别方法——极限学习机,由于ELM具有极快的学习速率和泛化程度较高和不容易出现局部最优解的优点,受到国内外人员的关注,各种改进的ELM方法也层出不穷[3]。
极限学习机是一种针对单隐层前馈神经网络的新算法。与之前的传统训练方法相比,ELM方法具有学习速度快,泛化性能好等优点。但它还有一定的缺点,训练速度比较慢,容易陷入局部极小值点。因此,本文为了提升ELM模型的泛化能力和识别准确率,提出粒子群优化极限学习机PSO-ELM模式识别方法。
1 粒子群算法优化的极限学习机
极限学习机算法具有计算量小,参数调节容易,初始输入权重和隐含层偏置对算法影响较大的特点,即便节点参数不需要通过反向传播迭代调整,但对于隐层节点的作用也会影响,最终导致ELM网络结构复杂度的增加,影响其泛化能力与稳定性;PSO 算法具有精度高,收敛速度快的优点,本文提出一种将PSO 算法与ELM 算法相结合的故障检测方法,利用PSO 算法对ELM 算法的输入层权重和隐含层偏置进行优化,能有效解决由于ELM随机产生阈值、输入权值所引起的问题,提高泛化能力。
本文提出了一种结合PSO 和ELM 的故障诊断方法。从而得到一个最优的滚动轴承故障诊断模型,以提升ELM模型的识别准确率。PSO-ELM故障诊断具体实现步骤如下:
(1)初始化设置种群规模、粒子位置和速度;
(2)求每个粒子的适应度值;
(3)对比每个粒子与当前个体极值、全局极值的适应度值大小,若粒子个体的适应度值和都小于其适应度值,则将原始个体极值和全局极值被个体替代;
(4)将粒子个体替代原始的个体极值和全局极值;
(5)如果最大迭代次数或误差达到要求,流程结束,否则回到步骤(2),继续迭代。
2 滚动轴承故障诊断实例分析
2.1 实验数据
通过使用美国凯斯西储大学轴承数据中心提供的实验数据。电机驱动端深沟球轴承型号为SKF6205,振动信号由16 通道数据记录仪采集得到,功率和转速通过扭矩传感器和译码器测得,两种采样频率分别为12Khz 和48Khz,电机转速近似为1772r/min。
实验选取了滚动轴承驱动端采样频率为12K 的数据进行研究,分别为滚动轴承的正常状态、滚动体故障、内圈故障和外圈故障共11 种状态的数据采集。每种状态的负载为1hp,hp 为英制的马力,1hp=0.75kW,每个时域样本取1024 点,11 种状态的1hp 样本为100 组。
2.2 滚动轴承状态识别实验
在运用极限学习机进行滚动轴承故障状态识别时,应该充分考虑隐含层节点结构,若个数太少,网络对数据的拟合能力较差;若个数太多,网络容易出现过拟合现象,无法较好的反映出未知数据样本的特征规律,分类结果也不理想。
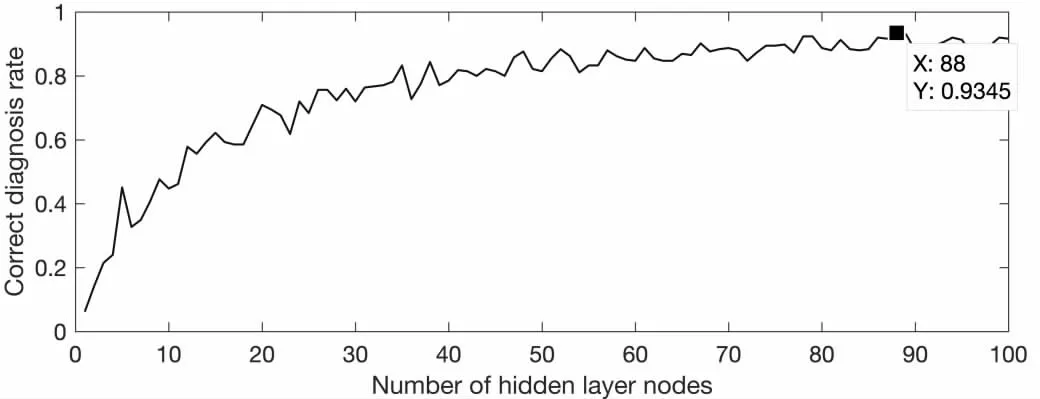
图1 不同隐含层节点个数的分类准确率
为了确定极限学习机中最优的隐含层节点个数,固定正则化参数λ,隐含层节点个数m 取值为78 至100。固定的λ 值和隐含层节点数对ELM分类准确率的趋势如图1 所示,当隐含层节点个数增加至88 时,ELM分类准确率最高达到93.45%,故本文选定λ=0.5,隐含层节点个数为88。
本文分别将PSO-ELM 和ELM 两种故障识别方法进行对比,其中图2 和图3 可以看出,通过粒子群优化过的ELM 比未优化ELM的准确率提高了4.26%,并且期望输出和实际输出相差无几,说明没有优化的极限学习机的识别准确率较低,不能达到预期的效果。由此本文采用粒子群优化算法。结果数据由表1 所示。
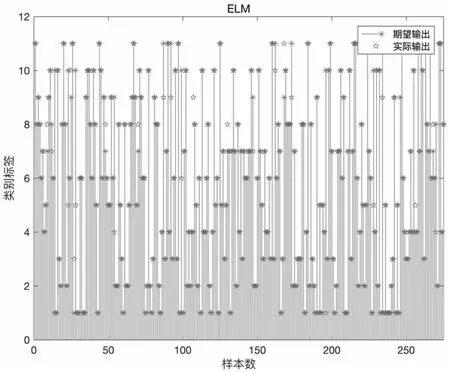
图2 ELM 识别结果图
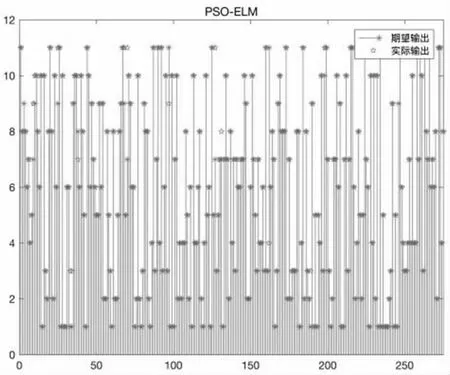
图3 PSO-ELM 识别结果图
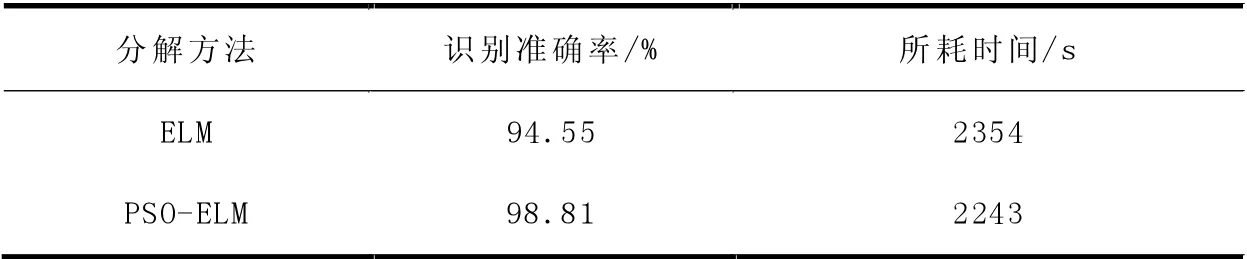
表1 不同识别方法下的故障识别结果
3 结论
本文针对极限学习机训练速度较慢,容易陷入局部极小值点,并且其输入权值和阈值是随机产生的,对故障诊断的结果具有一定影响的问题,提出了利用粒子群算法对极限学习机结构进行优化,用该方法可以得到极限学习机所需参数的最优解,实现滚动轴承的故障识别。通过PSO-ELM和ELM实验结果的比较,可以看出PSO-ELM在识别准确率和所需的时间方面比其他两种方法更优秀,识别准确率与ELM提升了4.26%。
由此可以说明本文提出的方法可以实现滚动轴承四个状态下的有效识别,在滚动轴承的故障诊断领域研究具有重要的意义。



