杜海莲 毛瑞鑫 杜文霞* 王 瑾
(河北师范大学职业技术学院,河北 石家庄050024)
1 概述
水下机器人自身及所处环境是一个复杂的动态系统,具有非线性、大时滞的特点,水下机器人故障诊断技术是相较于其它学科来说刚刚兴起的学科,是将自动控制理论、概率论统计、人工智能控制等各个学科结合起来的一门综合性学科[1]。1999年美国夏威夷大学为每一个执行机构安装了传感器以便于判断各个部件有无发生故障[2]。在1999 年时日本东京大学为水下机器人搭建了数学模型并且基于这个模型,通过采用回归型神经网络再去建立水下机器人的动力系统模型从而来进行水下机器人的故障诊断[3]。之后不同的国家分别提出了不同的研究方法比如:苏格兰爱丁堡赫瑞- 瓦特大学提出了综合多元化信息来构建故障诊断系统,法国和德国以及意大利等国家支持向量机方法对水下机器人进行故障检测,这些都取得了较为不错的成果[4-7]。
基于主元分析的水下机器人故障诊断方法对于系统模型的精确性要求不是很高,主要依托于现有的水下机器人正常工作状态下的数据,结合主元分析的方法对其中的有效信息进行统计,这样就可以模拟出水下机器人正常工作时的数学模型,在水下机器人运行过程中,采集并检验实时数据通过统计量图观察实时数据,与已经建立的主元模型的契合程度来诊断异常和故障,所以相较于其它传统的方法,主元分析法更加贴近真实,可行性更强[8]。
2 主元分析理论
主元分析方法本质是寻找一组新的变量来代替原有变量,新的变量是原来的变量经过一系列的变换和线性组合而形成的。但是要求新的变量维度降低,并且要保证这组新的变量最大限度的保留原来变量的特征信息,且还要保证新的变量之间相互独立。
传感器采集信号列成X=n×m 的数据矩阵,n 为数据采样个数,m 为传感器个数,X 表示如下:

E 代表X 在pk+1到pm负荷向量方向上的变化,k 为主元个数。
主元分析故障诊断步骤如下:
(1)首先计算协方差矩阵XXT的n 个特征值,并将他们按大小排列λ1叟λ2叟…λn,并且可以求出对应的正交特征向量q1,q2,…qn。
(2)计算主元个数:前k 个特征值的累计方差贡献率要大于等于85%,此时记录k1 的值。
Q 统计量的分布可以按照Jackson 和mudholkar 方法来近似计算,算出Q 统计量的控制限[10]:λi协方差矩阵的特征值;Cα为正态分布在检验水平下α 的临界值。
因此Qi可以求得:

3 水下机器人的故障诊断
基于主元分析方法的水下机器人故障诊断就是通过对检测样本数据的分析并将其与稳定工作状态时对水下机器人建立的主元模型进行对比分析。由于水下机器人的主元分析模型在稳定工作状态下它的过程变量基本上满足正态分布,所以通过分析检测研究样本与主元模型的偏离程度来判断水下机器人系统是否发生了故障,并判断是何种故障。
首先确定水下机器人的传感器数据:螺旋桨转速、电机电流、主控电源电压、主控电源电流、动力电池电压、动力电池电流、电机温度、水下机器人深度。然后根据正常数据搭建水下机器人的模型,根据累计方差贡献率算法以及计算平均值相结合的办法确定主元个数,然后求出所对应的主元子空间和残差子空间。然后计算出Q 和T2阈值,将新的检测值进行统计量的计算来判断是否发生故障。分别按照上述基于主元分析法对水下机器人进行故障检测。
3.1 单变量阶跃故障
第三个变量的第50 节拍到第150 节拍模拟水下机器人发生了故障,然后对新的数据与所建主元模型进行对比。分别绘制出了T2统计量图和Q 统计量图以及两个统计量图的混合指标图,可以清楚的发现统计量超过了控制阈。所以断定机器人系统发生了故障。紧接着画出贡献图以此来进行确切的故障诊断。
图1 和图2 可以看出统计量超出了阈值,所以断定机器人系统发生了故障。根据图3 的贡献率的大小得到变量3 发生了故障。
3.2 单变量尖峰故障
第四个变量在第51 个节拍到第52 个节拍处发生了尖峰故障。分别绘制出了T2统计量图和Q 统计量图以及两个统计量图的混合指标图,可以清楚的发现统计量超过了控制阈。所以断定机器人系统发生了故障。紧接着画出贡献图以此来进行确切的故障诊断。
可以明显的观察到图4 和图5 两个统计量图分别出现了一个尖峰超出自身控制限。结合贡献图的识别,大致可以确定出是第四个变量引起的故障。诊断与所设条件相符合,诊断正确。

图1 阶跃故障统计量图

图2 阶跃故障混合指标图

图3 阶跃故障贡献图

图4 单变量尖峰故障统计量图
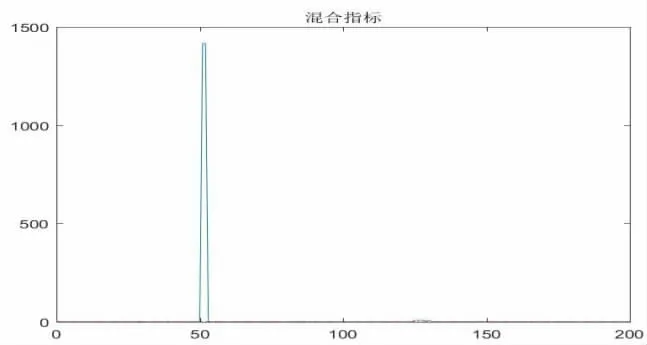
图5 单变量尖峰故障混合指标图

图6 单变量尖峰故障贡献图
4 结论
水下机器人故障检测技术是保障其安全平稳运行的关键。基于主元分析的方法来进行水下机器人的故障检测技术的研究并不需要进行精确的模型搭建, 只需要对数据进行提炼就可以构建的模型,这就大大降低了人们的任务量,对于工程上的故障检测技术来说具有很大的优势,有效地推动了故障检测技术的进步与发展。



