刘旭东 王 爽
(苏州大学应用技术学院 工学院,江苏 苏州 215325)
苏州阳澄湖大闸蟹作为当地的特产美食已形成从蟹苗培育到市场销售的全产业链。阳澄湖大闸蟹使苏州名声大振,推动了经济崛起与发展,这是中国其他地区不可比拟的。
但是苏州阳澄湖大闸蟹总体的产业化经营仍然处于初级阶段,依旧存在类似缺乏先进的养殖技术等一系列问题,极大程度上限制了苏州大闸蟹产业的现代化可持续发展[2]。
水产养殖一个很大的难题是水质难以实时监测和控制,目前个体养殖户主要依靠人为观察等方式进行监测,管理模式粗暴。水污染必定会导致大量螃蟹死亡,并给养殖商户造成巨大的经济损失。
随着我国现代科学技术的快速发展,导致了物联网养殖的出现,致使传统的养殖模式并不能满足水产养殖商户的价值需求,于是就开始向这一养殖新模式转变。以基于物联网的水下机器人为研究对象,总结出目前还没有水下机器人相关的产品流入到市场上,于是我们就提出了一种现代化创新型的基于物联网技术的水下机器人,这种水下机器人需要涉及到多项核心技术的研究并相互结合。
1 水下机器人的机械系统设计
1.1 水下机器人的总体方案
水下机器人系统有三个部分构成,又可细分为六个系统,如图1 所示。水下机器人的控制系统必须保证执行机构运动时的稳定性,尤其是水下避障时的稳定性,其结构紧凑保证了运作时实现功能的可靠性,还留有闲余空间用于安装其它元器件。

图1
1.2 水下机器人的机械结构设计
本设计采用的机械结构不仅要实现机器人在水下转向灵活的特性,实现水下检测、避障等功能,还要实现主题机械部分保持机身全程平衡,还能让手爪作为机器人的辅助功能抓取水下物质[3]。如图2 所示,各个部分都有各自的功能。使用SolidWorks2018 软件对水下机器人整个机械系统的三维建模也如图2 所示。
1.2.1 主体机械部分
水下机器人的主体机械部分也称为总骨架,把各个机械构件和功能模块结合在一起。
1.2.2 核心控制舱
核心控制舱不仅控制各项机构动作,还控制传感器检测参数以及蓝牙连接信号接收器。核心控制舱主要由主控模块、蓝牙模块、驱动与控制模块和防护外壳组成。以及下方安装锂电池为它们提供电能[4]。
1.2.3 避障机械部分
本设计的避障机械部分采用了杠杆伸缩原理,通过安装电动推杆来实现换向功能。
1.2.4 推进器部分
推进器是动力来源,使整个机械系统能够在水下保持平衡运动和避障运动。
1.2.5 手爪部分
手爪的功能是协助水下机器人在水下运动时通过探测抓取水下物资来进行检测。
2 硬件设计
2.1 系统硬件设计
2.1.1 主控芯片:STC89C52RC:具有极低的功耗,并且该芯片具有强大的抗干扰能力和高速8 位微处理器。同时,该芯片非常安全,加密后无法解密。
2.1.2 微型电机驱动芯片L293D:作为一个驱动,同时将高压和大电流与四个通道结合在一起。这种类型的调光器主要用于TTL 和DTL 连接,但也可以用于驱动感性负载并具有某些开关功能。为了更方便地使用双桥,L.293D 每个通道只有一个激活输入[5]。驱动器电路的电源输入是独立的。也就是说,它可以在低电压环境下运行。
2.1.3 舵机:接收器将控制信号发送到调制芯片,并将其转换为偏置电压。转向器中的基本电路可以产生参考电压。比较偏移电压和参考电压后,输出电压差。该计算机可以控制电动机的正向和反向旋转。当电动机达到恒定速度时,可以使用级联齿轮旋转电位差计,并且控制电压差变为零,从而使电动机停止运行。
2.2 传感器
2.2.1 BH1750FVI 光照传感器:一款现代化程度非常高的光强度传感器。
2.2.2 DS18B20 温度传感器:其输出为数字信号,体积小,硬件过载低,抗干扰性强且具有高精度特性。
2.2.3 PH 传感器:可自动采集数据、数据分析等功能。它的典型应用是进行对酸和碱研究,酸碱滴定,酸性雨水和缓冲液研究等。
3 软件设计
中控芯片接收并处理所有信号。接通电源后,应初始化芯片,并使舵机复位。然后,它接收蓝牙模块生成的中断信号,并根据通过蓝牙传输的信号控制各项组成元器件,图3。
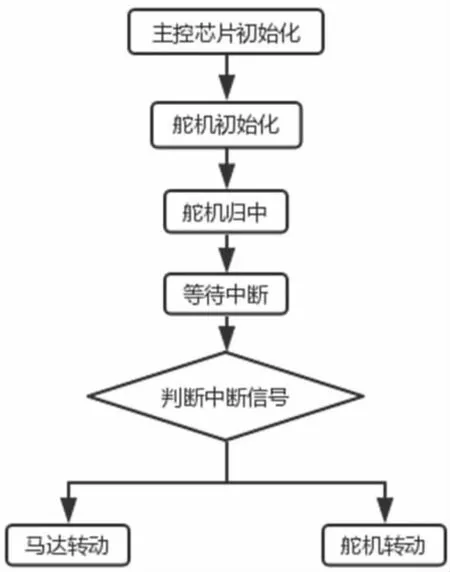
图3
4 结论
随着中国现代科学技术的快速发展,导致了物联网养殖的出现,致使传统的养殖模式并不能满足水产养殖商户的价值需求,于是就开始向这一养殖新模式转变。目前还没有水下机器人相关的产品流入到市场上,于是我们就提出了一种现代化创新型的基于物联网技术的水下机器人,这种水下机器人需要涉及到多项核心技术的研究并相互结合。



