但强
摘 要:英德拉二次雷达在民航系统中使用较为广泛,随着投产时间增加,部分器件老化,在使用过程中出现了一些新的问题。本文对英德拉二次雷达出现的目标偏移现象进行分析,从现场处置到设备维修,探讨了导致目标偏移的几种可能因素,通过现场测试和验证,给出了针对该现象分析和处理的方法。
关键词:雷达;相位;单脉冲表;旋转铰链
中图分类号:TN974 文献标识码:A 文章编号:1671-2064(2019)18-0255-02
1 单脉冲测角简述
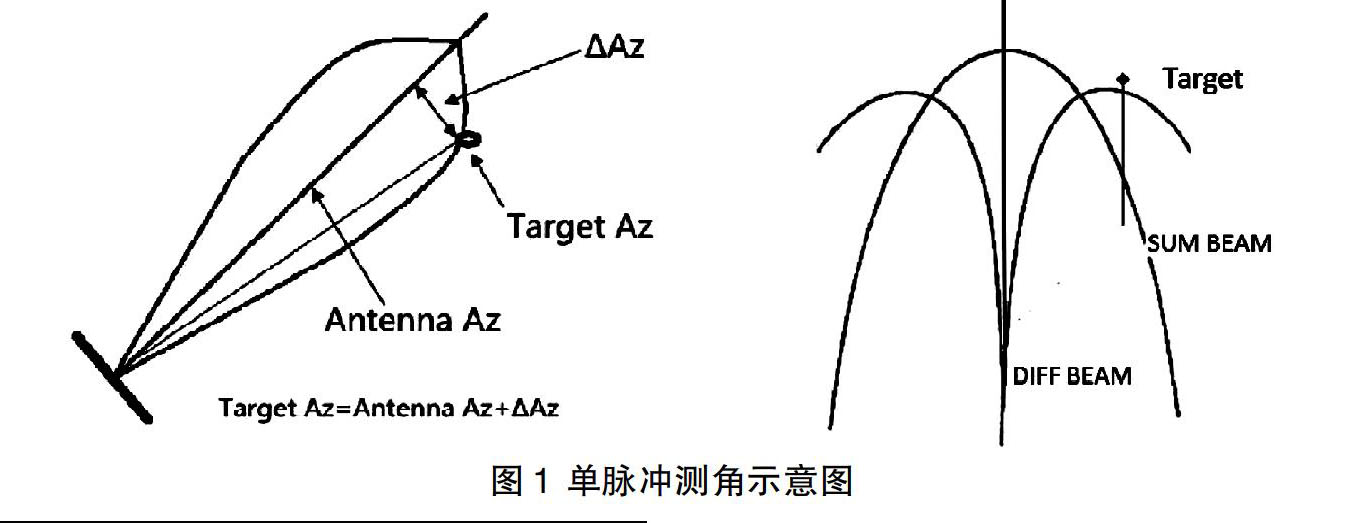
英德拉二次雷达是西班牙INDRA公司生产的具有S模式功能的单脉冲二次雷达,型号为20 MP/L MODE-S,该雷达使用单脉冲测角技术获取目标的方位信息。简单来说,单脉冲测角技术获取目标方位需要三个要素,即天线波束指向角、目标偏离瞄准轴角度和符号信息。其中,天线波束指向角,可由天线码盘给出。目标偏离瞄准轴角度,可使用归一化差信号,通过和差比的幅值信息得出目标偏离瞄准轴的信息(OBA)。符号信息,即目标相对于瞄准轴偏左或偏右的信息,可通过测试和信号与差信号之间的相对相位关系来确定。图1表示了目标方位与天线波束指向角和偏离角度的关系,其中偏离角度(ΔAz)包含目标偏离瞄准轴角度和符号信息,所以可得:
目标方位(Target Az)=天线波束指向角(Antenna Az)+ 偏离角度(ΔAz)。
2 英德拉二次雷达目标角度计算
在雷达信号接收过程中,目标产生的1090MHz应答信号经天线被和(Σ)、差(Δ)与控制(Ω)通道同时接收,经射频切换开关和TRA单元,送往接收机。在接收机中,和信号与差信号送到单脉冲检测器,由此得到单脉冲视频信号。具体来讲,目标1090MHz应答信号经射频放大、滤波,与1030MHz本振信号混频,产生60MHz中频信号;60MHz中频信号,经过中频放大、中频滤波,再经GTC控制,而后和差(Σ/Δ)信号送到单脉冲检测器,产生单脉冲视频信息。
单脉冲检波器接收Σ/Δ信号生成单脉冲视频,最终以量化电压值表示,单脉冲视频有两层含义:Σ/Δ信号的幅度比值表示目标偏离天线瞄准轴角度的大小,最终以单脉冲电压值的大小来表示;Σ/Δ信号的电气相位表示目标位于天线瞄准轴的左侧或右侧,最终以单脉冲电压值的正/负来表示。
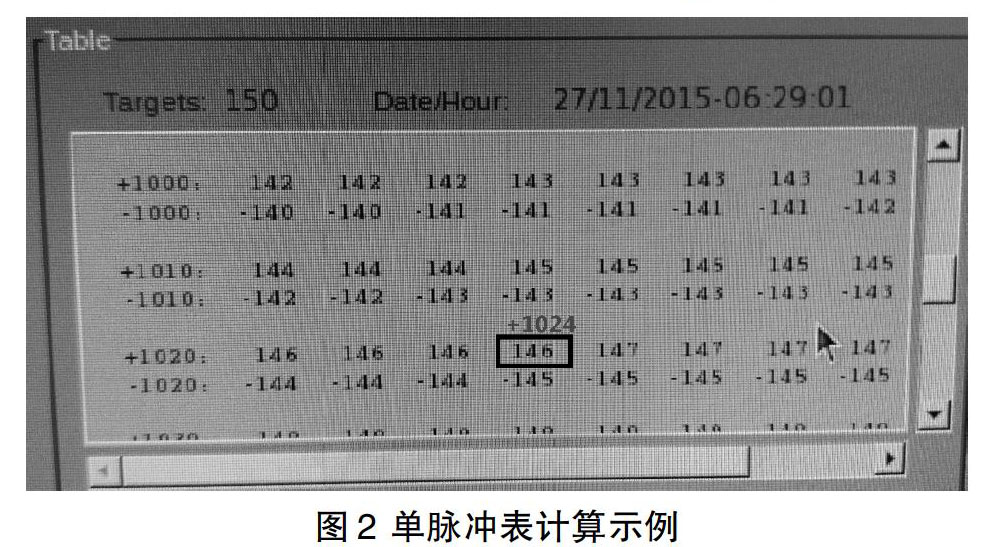
具体来看,在雷达本地监控终端SLG上,由归一化的差信号强度得出单脉冲表。单脉冲表是在雷达设置在常规模式下,录取器对150个独立无干扰目标统计结果的平均值。单脉冲表中的数值,即量化电压值,是数值化的单脉冲视频与ACP脉冲数的关系,单位为1/4ACPs。量化电压值的大小对应目标偏移瞄准轴的角度的大小;量化电压值前面+/-符号,即表示目标位于天线瞄准轴的左侧或右侧。
如图2,最左列数值表示数字化单脉冲视频,即量化电压值;右边数值对应1/4ACP的个数,可以由此计算偏离角度。比如,量化电压值+1024,对应的1/4ACP个数为+146,计算可得ACP个数为+146*(1/4ACP)=+36.5ACP,则对应角度计算为+36.5*360°/16384=+0.8°,即偏离角度为为+0.8°。由此可得,该目标方位=天线波束指向角+0.8°。其中天线波束指向角可由编码器直接得出,所以通过此计算即可得到目标方位。
3 目标偏移现象及分析处理
在雷达站维护现场发生目标偏移现象时,SLG无告警信息;机柜各模块运行正常,指示灯无告警;观察VR3000目标点迹不平滑,存在弯曲偏移现象。一般来说,运行中的设备出现故障时,大致分为两个阶段处理:
(1)应急处置阶段:即按应急手册进行操作的阶段。该阶段强调故障恢复的时效性,操作简便、流程固定。目标偏移现象发生后,由于设备无任何告警信息,先后采取了切换雷达主备A/B通道、切换主备编码器、切换工作模式、单通道重启、单通道重置录取器等操作,均未改善目标偏移现象。
(2)设备维修阶段:应急处置无法恢复设备正常运行时,即转入设备维修阶段。该阶段通过现象分析、模块测试、仪表测试等,判断故障位置,排除故障。在一系列简单处理没有效果后,需要采用更直接的维修手段。深入分析,硬件上,从应答信号被天线接收以后整个通路,若某模块出现故障,有可能影响目标方位信号判断处理;软件上,SLG单脉冲表内的值发生变化,也会影响目标方位计算;符号位的判断上,如果符号信息判断有误,也会产生目标产生偏移现象。
硬件方面,1090MHz应答信号经天线至机柜顶端进入,依次经过TRA、MRU、MEX(MCPU/MICA02/MICA03)单元。在维护现场,对维护通道分别使用性能良好的备件更换通路中的各板件,切机观察目标偏移的现象并未改善,由此可排除机柜内模块故障导致目标偏移的可能性。软件方面,若单脉冲表里面的值出现问题,可通过重新生成单脉冲表进行纠正。经现场测试,无法重新生成单脉冲表。还有一种可能就是符号位的判断问题,符号信息是和信号与差信号之间的相对相位关系来确定,应考虑和差相位关系是否出现了问题。
进一步向上端排查机柜顶端至天线部分。英德拉雷达在机柜顶端和通道(Σ)与差通道(Δ)的相位关系是一定的,正常情况下,应当是Σ-Δ=90°(容差±10°)。因此,维护现场使用矢量网络分析仪对机柜至天线端各通道的驻波及相位进行了测量。
分别测量Σ/Ω/Δ三通道从机柜顶端至天线驻波比,测量结果VSWR值均小于1.5,处于正常范围。在天线基座上端,分别对Σ与Ω,Δ与Ω,用射频线缆短接形成回路,分别测量Σ+Ω,Δ+Ω两段的相位,再将两结果相减,即可得到Σ-Δ相位差。现场测量Σ-Δ=-189°,与正常值Σ-Δ=90±10°不符。测量结果表明和差通道相位差不正常,由此可初步判断和差相位差不正常导致目标偏移。
和差通道相位差不正常,在设备安装时可通过切割机柜顶至天线的线缆实现。由于现场预留线缆较短,割线缆可能导致线缆两端长度不够无法连接。经分析,调整和差相位,除了对线缆进行切割以外,也可以通过增加一段线缆或者增加N型转接头实现。经现场多次测试调整,最终使得机柜顶至天线部分的和差相位调整为Σ-Δ=84.5°,恢复正常范围。此时,SLG上也可重新生成单脉冲表,观察VR3000目标偏移现象得到改善,航线上目标点迹平滑。
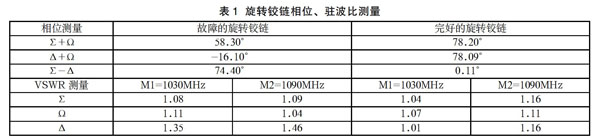
继续查找导致和差相位关系变化的根本原因。相位测量回路已经甩开了天线部分,整个测量回路只有旋转铰链和三通道射频电缆及电缆头。因此,测量的和差通道相位差不正常只有两种可能性,一种是射频线缆或射频头出现松动或弯折等导致相位变化,经检查排除了此种可能性;另外就是旋转铰链内和差相位关系有问题。所以进一步使用矢量网络分析仪测量旋转铰链的相位及驻波比,同时现场还测量了一件完好的旋转铰链备件以作参照,对比结果如表1。
正常情况下,旋转铰链的和差通道的相位应当是配平的,即Σ-Δ=0°;现场测试结果也验证了这一点,测得完好的旋转铰链备件Σ-Δ相位为0.11°,接近于0°。而正在使用的旋转铰链Σ-Δ=74.40°,此可判断旋转铰链故障。由于旋转铰链为精密密封器件,现场无法拆卸处理,只得更换旋转铰链备件。更换备件后,目标偏移现象消失。因此,旋转铰链内部和差通道相位差不正常,是导致目标偏移现象发生的原因。
4 结语
雷达设备维护是一项长期而复杂的任务,从建设投产至长期使用的过程中,会遇到各种问题,特别是在雷达监控终端无告警提示的情况,排查更加困难。本文针对维护现场出现的目标偏移现象,简单介绍了英德拉二次雷达目标角度计算方法,再从现象判断、结构分析、操作验证、测试测量等方面,较为详细的还原了维护现场的分析和处理过程。最后希望本文能够对英德拉雷达设备维护人员有所帮助和借鉴,共同保障雷达设备安全稳定地运行。
参考文献
[1] 张尉.二次雷达原理[M].北京:国防工业出版社,2009.
[2] IRS-20MP/L Mode-S Interrogator Maintenance Manual[Z].



