周芸梦 罗扉 曹贝贝
摘 要:文章分析的水泥插袋机械手臂是一个相对比较复杂的机械结构系统。结合插袋机械手臂的结构特点和工作情况,为了保证机械手臂的可靠性和耐久性,使用ANSYS软件对其进行分析,得到基于最大载荷状态下,机械手各位姿的机械结构强度以及基于最大负载情况下的机械手结构系统的疲劳寿命。
关键词:机械手;静力学分析;寿命评估
中图分类号:TP241 文献标志码:A 文章编号:2095-2945(2019)29-0082-04
Abstract: The cement pocket manipulator analyzed in this paper is a relatively complex mechanical structure system. According to the structural characteristics and working conditions of the cement pocket manipulator, in order to ensure the reliability and durability of the mechanical arm, it is analyzed by using ANSYS software, and the results are based on the maximum load. The mechanical structure strength of each posture of the manipulator and the fatigue life of the manipulator structure system based on the maximum load.
Keywords: manipulator; static analysis; life assessment
前言
水泥包装生产过程中需要将水泥袋插入灌装机喷嘴处,目前国内这一环节的工作仍由人工完成。长期高粉尘条件下的工作,使得许多插袋操作工人患上呼吸系统疾病;由于水泥生产效率不断提高,人工方式插袋已经不能满足现阶段自动化生产的需求。水泥插袋机械手具有可靠性好、稳定性好、自动化程度高的特点,可解决水泥包装过程中插袋环节仍依赖人工的窘境。
本文以一种水泥插袋机械手为研究对象,通过有限元仿真软件ANSYS对其进行静力学分析并对其寿命进行评估。
1 插袋机械手臂结构静力学分析
根据插袋机械手的结构设计特点,采用保守性数值分析思路进行机械手静力学分析。笔者假设水泥灌装过程中水泥包装机压板压紧水泥袋,机械手为辅助夹持状态运行的情况来建立模型。根据SHHYW-C 系列水泥包装机的参数,包装机出料嘴数为8,装袋能力为80-120T/H。计算可知最大工况下,每个出料嘴每秒钟灌装水泥约为5kg。在模型建立时,采用的是实体建模,关键部位网格细化,实体网格,优化结构,这样做不会影响分析结果,也可以保证计算准确。由于本次设计的机械手臂结构较为复杂,拟对运行过程中两个受力最大位姿进行分析。
根据水泥灌装的匀速动态载荷的特点,机械手承受的外载荷是F=ma的稳态动载荷,针对载荷特点机械手系统的结构强度有限元分析采用最大稳态动载荷fmax=ma=M/Tmin的结构静力学分析方法。
1.1 插袋机械手第一位姿的载荷分析
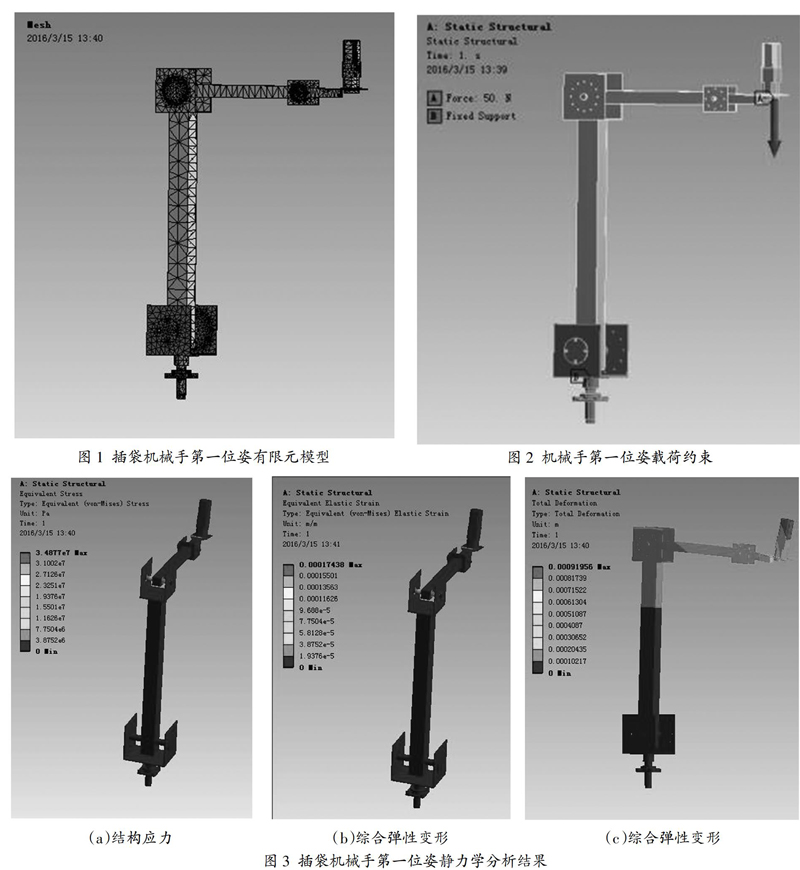
下面对插袋机械手的第一位姿进行载荷分析,即大臂与地面垂直,小臂和手部水平姿态,建立插袋机械手的三维模型,如图1所示。
考虑单位时间(1s)最大载荷约束为50N如图2,对建立好的有限元模型添加约束后进行分析,约束为紧固约束。机械手材料采用性能较好的Q235材料,材料参数如表1所示。
表1 插袋机械手材料参数
根据材料参数和三维模型,可利用ANSYS 建立有限元模型,通过软件进行分析可得如下结果,如图3所示。我们可以看出工况下最大应力位置在连接轴附近,最大应力约为3.49MPa,远低于所用材料的屈服应力值。机械手综合弹性形变最大值为0.174mm。将机械手所有弹性形变进行矢量叠加,求合得到插袋机械手的总体位移最大值为0.9mm,这一数值在设计的可控范围之内。经以上分析显示,插袋机械手第一位姿情况完全符合强度和精度的要求。
1.2 插袋机械手第二位姿的载荷分析
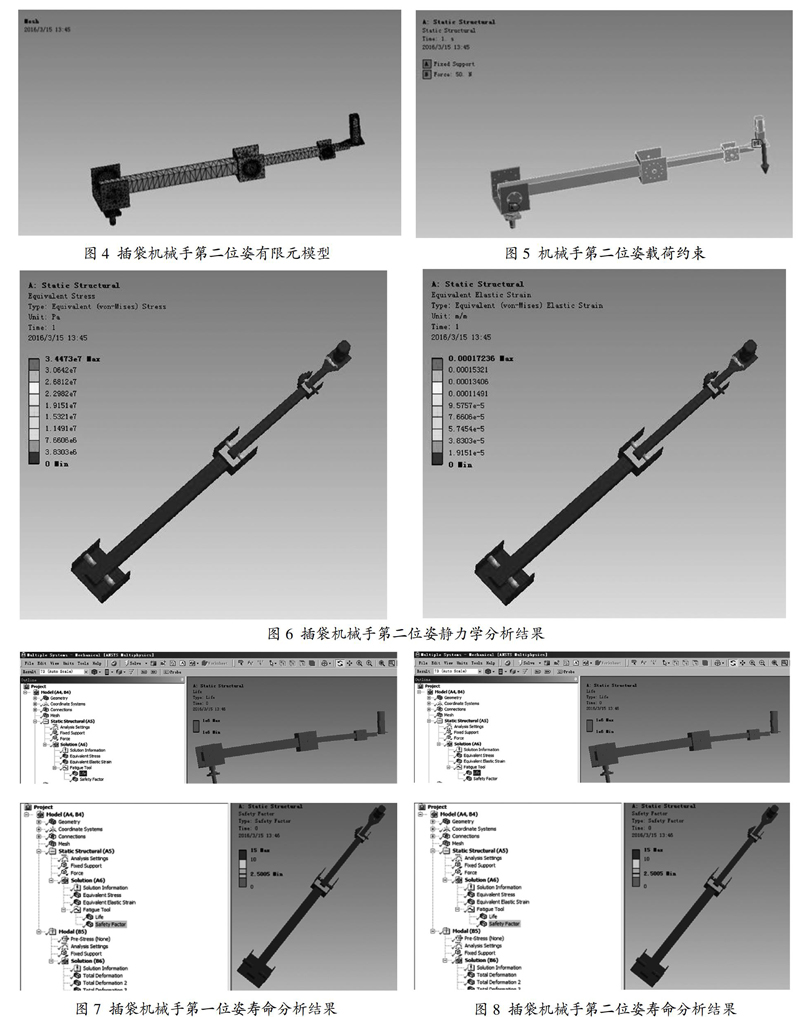
下面对插袋机械手的第二位姿进行载荷分析,机械手的第二位姿进行载荷分析,即大臂、小臂和手部成一水平直线的姿态,建立插袋机械手的三维模型,如图4所示。考虑最大载荷约束仍为50N如图5,对第二位姿的有限元模型添加约束后进行分析,约束为紧固约束。
根据材料参数和三维模型,利用ANSYS建立有限元模型,通过软件进行分析可得如下结果,如图6所示。我们可以看出第二位姿工况下最大应力点,位置在连接轴附近,最大应力约为3.45MPa,远低于所用材料的屈服应力值。机械手综合弹性形变最大值为0.172mm,这一数值在设计的可控范围之内。经以上分析显示,插袋机械手第二位姿情况完全符合强度和精度的要求。
2 插袋机械手的寿命评估
在工作过程中,零部件会受到交变载荷的影响,进而出现交变应力,并作用于零部件上。只要力的大小仍小于许用应力,便可继续使用。而达到随着工作时长增加,部分位置会产生疲劳现象,可能会出现其部分位置已经损坏,而其力还小于许用应力的情况。根据插袋机械手各关节部位的结构和运动特点,对疲劳可靠性要求较高,现阶段设计的对象还不能达到要求。对于机械手的使用年限分析以及其疲劳强度的分析,采用的方式为进行疲劳试验。而试验中存在很多缺陷,不仅维护成本较高,对年限分析存在局限性,并且其对机械手的结构损伤较大。本文采用最大结构应力评价准则进行保守型寿命评价。
2.1 插袋机械手第一位姿的寿命评估
将之前建立好的机械手第一位姿有限元模型满载荷情况下的寿命进行分析,结果如图7所示。可以看出,结构在最大应力下可运行时间为106小时,属于高周疲劳结构,结果较好。第一位姿状态下安全系数最小2.47,说明属于合格,并且优化了结构。
2.2 插袋机械手第二位姿的寿命评估
将之前建立好的机械手第二位姿有限元模型满载荷情况下的寿命进行分析,结果如图8所示。可以看出,结构在最大应力下可运行时间为106小时,属于高周疲劳结构,结果较好。第二位姿状态下安全系数最小2.50,说明属于合格,并且优化了结构。
3 结束语
本文利用有限元软件ANSYS对插袋机械手三维模型的两个位置姿态分别进行静力学分析和疲劳分析(寿命评估)。得到结论如下:(1)插袋机械手的结构设计满足工况最大载荷情况;(2)经过机械手寿命评估,寿命属于高周疲劳,能够满足工程使用寿命年限。
参考文献:
[1]王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014(09):1-13.
[2]孙英飞,罗爱华.我国工业机器人发展研究[J].科学技术与工程,2012,4:2912-3031.
[3]Subudhi B, Morris A S. Soft computing methods applied to the control of a flexible robot manipulator[J]. Applied Soft Computing Journal, 2009,9(1):149-158.
[4]邢静忠,等.ANSYS分析实例与工程运用[M].北京:机械工业出版社,2004.
[5]Insperger T.Stability analysis of periodic delay-differential equations modeling machine tool chatter. Hungary:Budapest University of Technology and Economics, 2002.
[6]崔志琴,杨瑞峰.复杂机械结构的参数化建模及模态分析[J].机械工程学报,2008,44(2):234-237.



