包书怡,袁心仪
(1.江苏师范大学 敬文书院,江苏 徐州 221116;2.江苏师范大学 电气工程及自动化学院,江苏 徐州 221116)
MEMS(micro-electro-mechanical system,微机电系统)陀螺仪是随着微电子技术和微加工技术发展而出现的一种测量物体角速度的传感器,它的突出优点是体积小、功耗低、价格适中,目前已在民用捷联惯性导航系统中获得较为广泛的应用。由于内部工作原理和制造工艺等方面的原因,MEMS 陀螺仪输出信号中含有较大噪声,测量准确度不高,使得惯性导航精度下降。对低成本陀螺仪噪声抑制问题开展研究,能够在较低硬件设备投入的情况下,通过软件算法就能获得较高精度的导航参数。为了从软件角度对陀螺仪的测量噪声进行估算与补偿,首先需要为MEMS 陀螺仪建立合理的随机漂移误差模型。MEMS陀螺仪的测量噪声是一个随机过程,建立平稳随机过程数学模型的方法一般有时间序列分析法和相关函数法,相关函数法的数学模型相对复杂,运算量大,算法实时性不够好,本研究将时间序列分析引入MEMS 陀螺仪随机漂移建模。
时间序列是指按时间先后记录的一列有序数据,这些数据通常受到各种偶然因数的影响而表现出某种随机性,同时,这些数据彼此之间又存在一定的相关性。时间序列分析旨在揭示时间序列中蕴含的内在规律,进而根据这种规律预测数据走势或对数据进行处理。基于时间序列分析的MEMS 陀螺仪随机漂移建模的内容包括数据采集、数据预处理与检验、模型结构确定和模型参数估计等。
1 陀螺仪数据预处理与检验
常用的时间序列模型有多种,其中,ARMA(Auto Regression Moving Average,自回归滑动平均)模型是拟合平稳时间序列的主流模型,AR(p)模型和MA(q)模型是ARMA(p,q)模型的2 种特例,本文采用AR(p)模型对MEMS 陀螺仪随机漂移误差进行建模。
在对MEMS 陀螺仪原始测量数据进行预处理并经过平稳性检验后,如果所得的数据序列满足平稳、正态、零均值条件,才能将AR(p)模型用于MEMS 陀螺仪随机漂移信号的建模,以获得更逼近真实陀螺仪随机漂移数据的数学模型。
1.1 数据采集
陀螺仪测量输出中的噪声信号是连续的,而时间序列分析法只能对离散信号进行建模,因此需要按一定的时间间隔对陀螺仪的输出信号进行采样。角速度为零时的陀螺输出信号称为陀螺仪的零点信号,零点信号能够较为准确地表征陀螺仪的随机噪声特性,故本研究采用MEMS 陀螺仪的静态采样信号,所用数据由瑞芬科技的MEMS 惯性测量单元中的三轴陀螺仪提供。采集数据时,MEMS 惯性测量单元被固定于减振平台,通电预热10min 后连续采集1h 陀螺仪数据,采样频率为50Hz,截取其中30min 陀螺仪输出数据用于分析研究。由于三轴陀螺仪3 个轴向具有相同的静态数据漂移特性,不妨以其中一个轴向(比如z 轴)的静态测量数据为样本进行分析研究。图1 绘制出z 轴陀螺仪采样30min 的原始测量信号。
1.2 数据预处理
陀螺仪测量输出中难免会出现一些异常值,这些异常值将给后续的时间序列分析造成不利影响。滑动平均滤波对周期性扰动信号有较好的抑制作用,建模前首先采用滑动平均滤波对陀螺仪测量数据进行平滑处理,去除原始数据中的异常值。然后,对所得的陀螺测量数据求均值,将去除异常值的陀螺测量数据减去均值,得到的陀螺随机漂移信号则为零均值的时间序列。同时,此陀螺随机漂移信号通常也服从正态分布。下面对数据预处理后的陀螺仪随机信号进行平稳性检验。
1.3 数据平稳性检验
随机过程平稳性检验常用的方法有逆序法、自相关法和轮次检验法等。本研究采用逆序法对上述经过数据预处理后的陀螺仪随机信号进行平稳性检验。逆序法过程简述如下。
(1)将容量为N 的样本等分成M 个子序列,求每个子序列的均值(或方差),得到一个大致不相关的序列y1,y2,…,yM;
(2)对于yi(i=1,2,…,M-1),每当出现后面的数大于yi时就将其定义为yi的一个逆序,记yi的逆序数为Ai;
(3)序列y1,y2,…,yM的逆序总数定义为
(4)记A 的均值和方差以及统计量分别为:

在显着性水平α=0.05 下,如果满足|λ|≤2,则随机过程平稳性假设成立,否则,随机过程非平稳。结合实测数据,从数据预处理后的z 轴陀螺仪采样信号中抽取容量N=15000 的样本,将其等分成M=100 个子序列,按逆序法验证陀螺仪随机漂移信号是平稳的。因此,可以将AR(p)模型用于陀螺仪随机漂移误差的建模。
2 陀螺仪随机漂移建模
2.1 模型结构的确定
p 阶自回归AR(p)模型的数学描述为:
式中φk为自回归系数,ωn为零均值白噪声,Xn表示n时刻的观测值,它是时间序列自身既往p 个观测值Xn-1,Xn-2,…,Xn-p线性回归(递推)及现时刻零均值白噪声共同作用的结果。本文基于FPE 准则确定AR(p)模型的阶次,FPE 准则函数定义如下:

2.2 模型参数估计
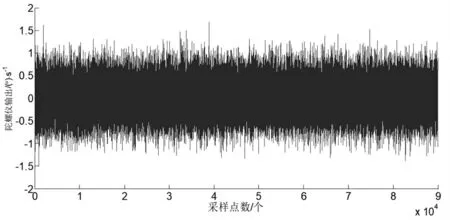
图1 z 轴陀螺仪采集30min 的原始输出信号
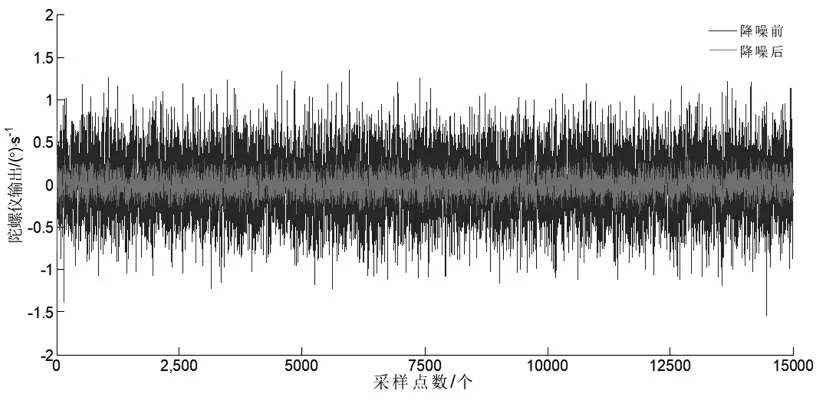
图2 z 轴陀螺仪降噪前后输出信号对比(N=15000)
AR(p)模型的参数估计就是估计上述公式(4)中φ1,φ2,…,φp这p 个参数的值。估计AR(p)模型参数的方法有多种,其中最小二乘法对参数的估计精度高,算法简单。分别将p+1,p+2,…,N(N 表示样本容量)代入(4)式中的n,引入列向量和矩阵,经整理后有:
估计出φ 后,白噪声方差σ2的最小二乘估计式写成:

以上述预处理后的z 轴陀螺随机漂移数据为输入,采用最小二乘算法对AR(1)模型的参数做出估计,得到其自回归系数φ1=-0.8023。于是,用于MEMS 陀螺随机漂移信号建模的AR(1)模型可以表示为:

其零均值白噪声ωn的方差估计式为:

3 试验结果与分析
由于对三轴陀螺仪3 个轴向的陀螺测量数据的处理方法完全相同,不妨取z 轴陀螺仪实测数据为样本,对经过上述数据处理后的MEMS 陀螺仪测量输出中的随机漂移噪声抑制效果进行对比。从z 轴陀螺仪测量输出中抽取容量N=15000 的样本,绘制出如图2 所示的经过降噪处理前后的陀螺输出信号对比图。由图2 可以直观地看出,低成本陀螺仪测量输出中的随机漂移噪声在经过上述数据处理后得到明显抑制。
4 结束语
本文将时间序列分析理论引入陀螺仪随机漂移误差的建模,以瑞芬科技某惯性测量单元的实测数据为基础,建立了MEMS 陀螺仪随机漂移的平稳时间序列模型,实际试验结果表明所述方法的有效性。



