高强,吴忠亿,邵长猛
一种小型专用分拣机械手的设计与研究
高强1,吴忠亿1,邵长猛2
(1.沈阳工程学院 机械学院,辽宁 沈阳 110136;2.京能锡林郭勒发电有限公司,内蒙古 锡林郭勒 026000)
根据企业需求,论述基于PLC控制的物品分拣机械手,以实现对不同颜色物品归类的目的。对机械手控制和驱动系统、执行机构进行了系统化设计,使用AutoCAD、UG三维软件建模、绘制控制电路图、液压图、分配I/O接口编制PLC程序,着重对手部夹持力进行计算并选取液压缸,使用力控软件搭建模型进行模拟运行,验证程序的可行性,达到预期效果,并试制出样机。
机器手;液压;PLC;UG
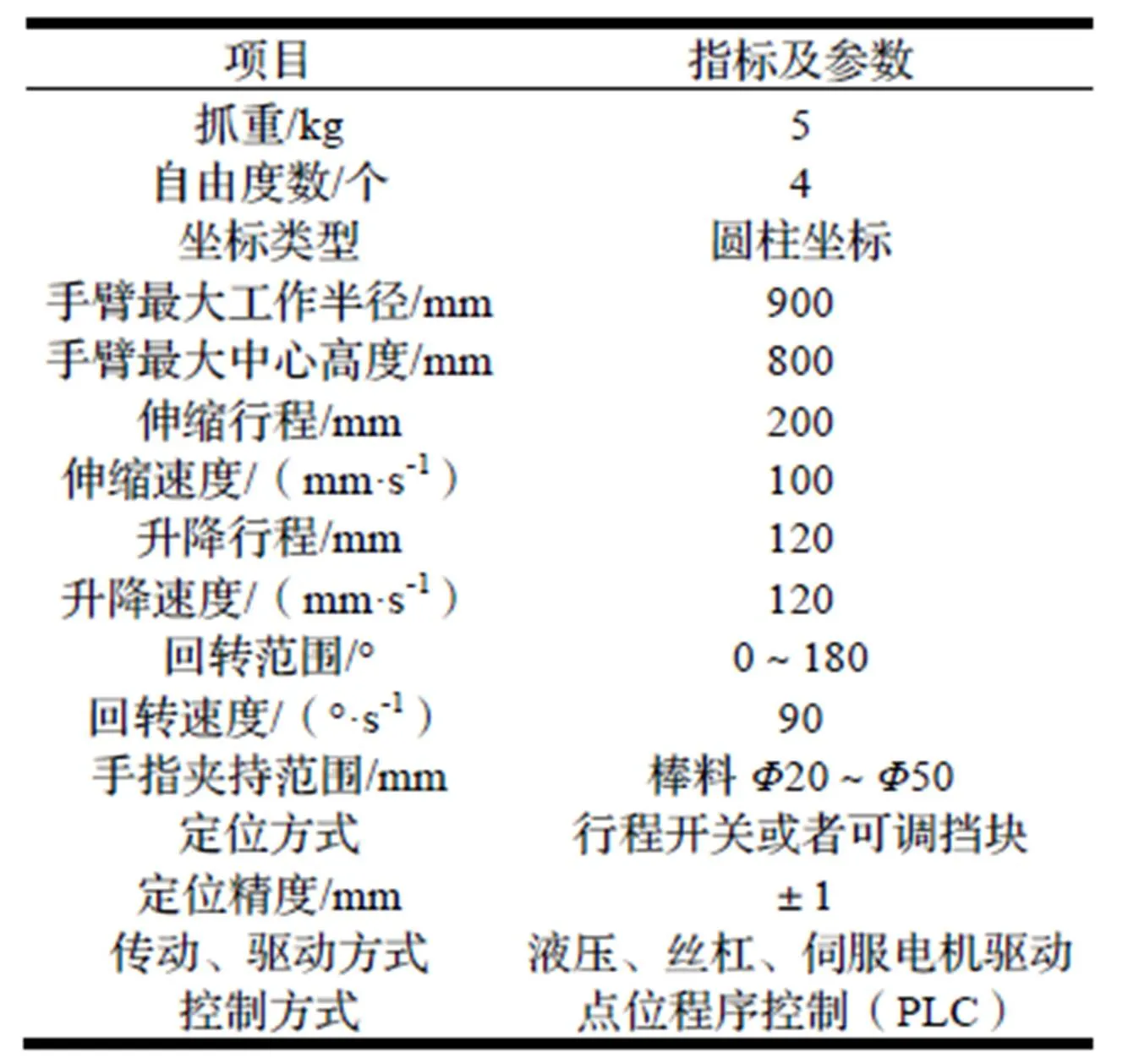
机械手是具有高强度、高精度的新型装置[1],可以按照预先设定的程序,完成预先规定的动作,在特殊环境中代替人完成工作。某企业实际生产中需要对镀锌棒、普通铁棒完成分拣捆扎任务,具体要求如表1,先期为企业研发的设备如图1,存在机械手夹持不牢、电机驱动抱闸不稳定等问题,针对这些不足,本文设计了一种小型分拣机械手,如图2,依据两种棒料颜色不同的特点,使用灰度传感器完成识别过程,进而实现两种棒料的分离包装。
1 机械手机构设计
1.1 手部结构的设计
机械手手部多为夹持式与负压吸盘式[2],本设计应用于棒料夹取,故选用夹持式。针对前期设计存在的夹取不牢、容易滑脱的缺陷,特设计成图2所示齿轮齿条连杆式移动夹持器,其中电磁式驱动器驱动齿条杆和两个扇形齿轮,扇形齿轮带动连杆旋转。连杆驱动两个钳爪作平移以及夹紧和松开动作,这样的手部设计能有效防止金属棒料的滑脱。

图1 初始设计实物及改进模拟图
表1 技术参数表
抓取工件重量=50 N;V形手指的角度2=90°,钳爪回转半径=100 mm>夹持半径=31 mm。
有经验公式:
式中:为驱动力,N;F为握力,N。
根据手指夹持工件的位置进行理论力学分析,可得:
计算得到:F=25 N、=166.6 N
传动机构为齿轮齿条传动,则有:
式中:F为实际驱动力,N;1为传动效率,取1=0.95;1为安全系数,取1=1.5;2为加速影响下的安全系数,取极限情况下机械手抓取棒料加速度为=2时,2=1+/=3。
Fo
≥
Fs
=789.5 N (4)
式中:F为输出推力,N。
即在夹持工件时所需夹紧液压缸的输出推力为789.5 N。
1.2 驱动系统的设计
立柱旋转采用伺服电机驱动的方式,由于整个机构在水平方向上只有较小的阻力,所以采用伺服电机驱动可以准确控制旋转角度,保证机械手在旋转过程中的位置精度;因液压驱动具有较大输出力、运动平稳、闭锁性能好,考虑到需抓取5 kg棒料,加之手部自身重量、整体精度等方面的要求,手臂升降、伸缩和手部夹紧运动均采用液压驱动的方式。
2液压系统设计
2.1 手部松紧液压缸的设计
手部松紧液压缸采用单向作用液压缸。其活塞杆上的输出推力必须克服弹簧的反作用力和活塞杆工作时的总阻力,公式为:
式中:1为活塞杆上的推力,N;F为弹簧反作用力,N;F为液压缸工作时的总阻力,N;为液压缸工作压力,Pa;为液压缸直径,mm。
式中:G为弹簧刚度,N/m;为弹簧预压缩量,m;为活塞行程,m;1为弹簧钢丝直径,m;1为弹簧平均直径,mm;为弹簧有效圈数;为弹簧材料剪切模量,一般取=79.4×109Pa。
在设计中,必须考虑负载率的影响,则:

由以上分析得:
代入有关数据,可得:
G=3677.46 N/m、F=220.6 N
所以:=65.23 mm
圆整得:=65 mm
由/=0.2~0.3,可得:
=(0.2~0.3)=13~19.5 (9)
式中:为活塞杆直径,mm。
其中[]=120 MPa、1=750 N,则:
满足实际设计要求。
2.2 立柱升降液压缸的设计
(1)液压缸的选择
液压缸运行长度设计为=120 mm,液压缸内径为1=110 mm,半径=55 mm,压强=0.4 MPa,则驱动力0=πr2=3799 N。
(2)尺寸校核过程
经过估算,手臂、手部结构总质量为50 kg,取g=10 N/kg,重力为1=500 N;
所设计的加速度,=5 m/s2,则惯性力2=250 N;
考虑活塞机构的摩擦力,设定摩擦系数=0.098,G=2=24.5 N,总受力G=+2+G=774.5 N,G<0,所以设计尺寸符合实际使用要求。
3 控制系统的设计
本机械手的手臂上具有三个自由度:水平方向上手臂的伸、缩,竖直方向上立柱的升、降,绕竖直立柱的旋转,以及末端执行装置手部部分的抓取动作。
3.1 设计控制流程
机械手启动后按照图3流程,通过液压驱动手臂升降,通过PLC控制液压系统中电磁阀的激励顺序来控制手臂的动作,由末端均放置的行程开关检测动作是否到位。手部手指上安装有压力传感器,将压力信号输入PLC,检测夹持力[3-5]。
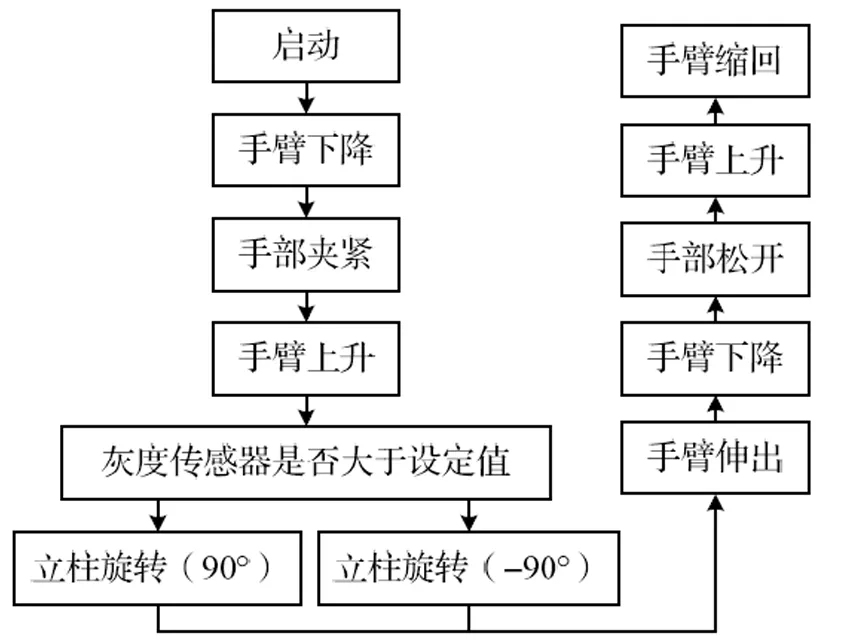
图3 机械手动作流程图
3.2 I/O分配
采用西门子S7-200系列CPU224作为整个机械手的控制用PLC[6],其输入输出接口如表2。
按图4连接PLC端口,SQ1为启动开关;XC1、XC3、XC4、XC5、XC7、XC8为行程开关;CG2、CG6为压力传感器;JJ9为接近开关;DT1、DT2、DT3、DT5、DT6、DT7为电磁阀接线端口,BM4、BM8为编码器接线端口;FM9为报警器;DG10为提示灯;DC11、DC12为电磁制动器接线端。

表2 输入输出接口分配表
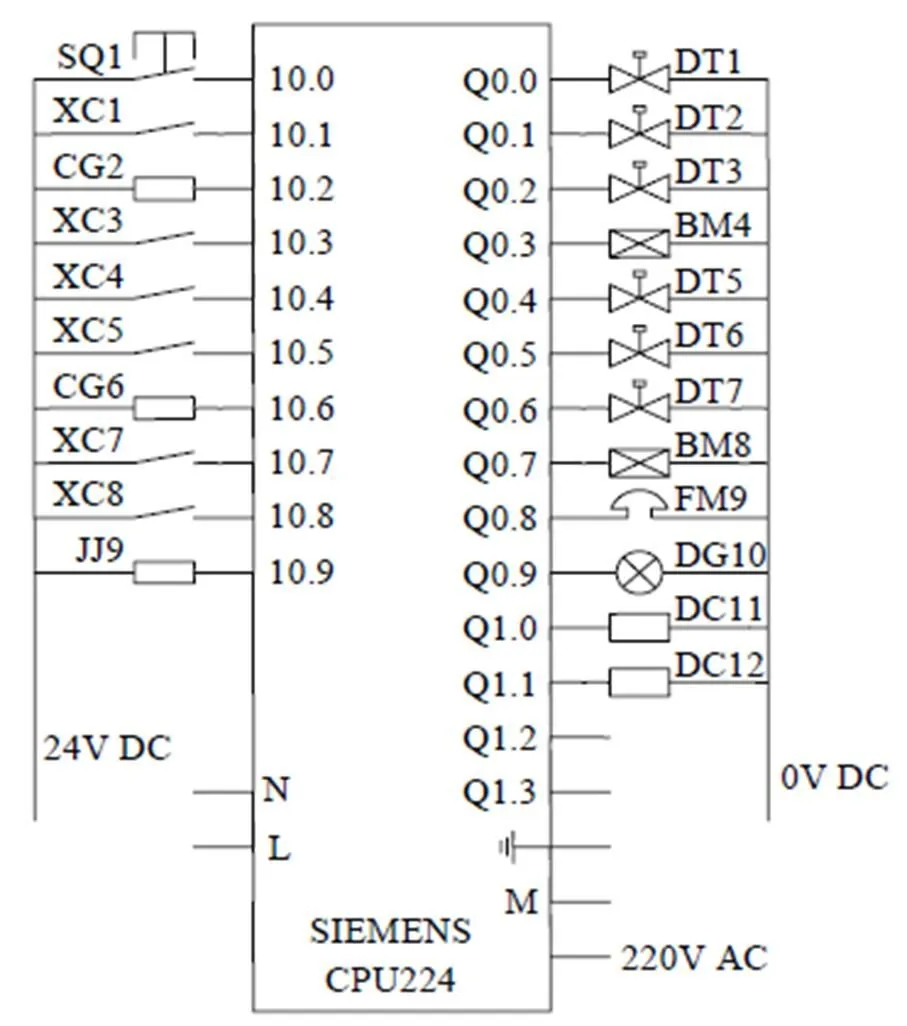
图4 PLC接线图
3.3 PLC的控制程序
按照流程图编写PLC程序T图,节选如图5所示。
4 结论
使用力控软件搭建机械手运动液压回路图如图6所示,验证了PLC程序的正确性。本设计在原有设计基础上,通过改进手部造型设计,使其更适合金属棒料的牢固夹取;使用液压系统代替电机丝杠驱动形式,使机械手定位更加准确稳定。最终设计出可行性高、适合该企业生产的机械手。
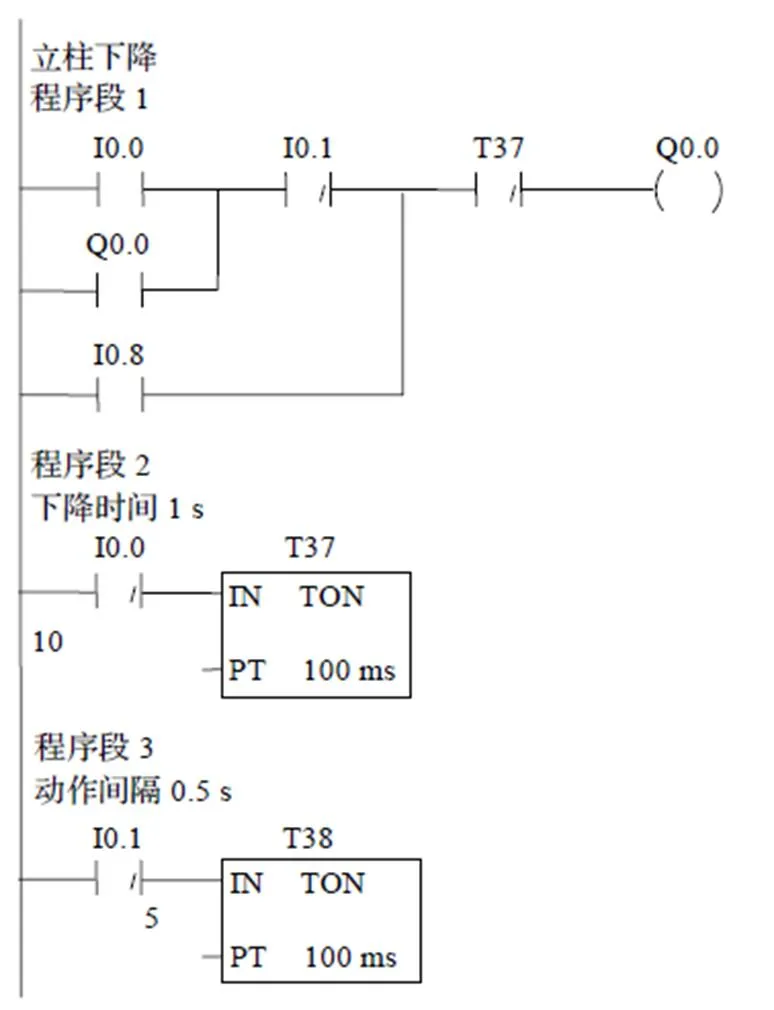
图5 PLC程序图节选
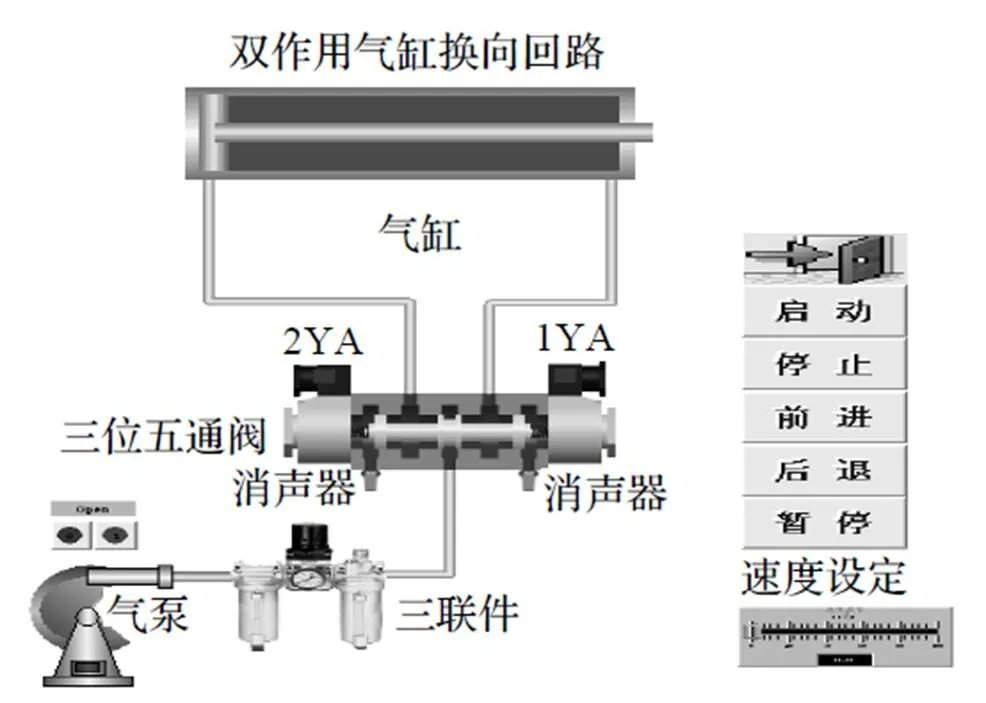
图6 力控仿真图
[1]梁景凯,盖玉先. 机电一体化技术与系统[M]. 北京:机械工业出版社,2015.
[2]牛瑞丽. 基于西门子PLC的小型搬运机械手控制系统设计[D]. 南京:南京理工大学,2013.
[3]高钦和. 可编程控制器应用技术与设计[J]. 北京:人民邮电出版社,2004.
[4]王永华. 现代电气控制及应技术[M]. 北京:北京航空航天大学出版社,2009.
[5]廖常初. PLC编程及应用(第2版)[M]. 北京:机械工业出版社,2005.
[6]Laurie Williams,Will Snipes,John P. On the Value of Static Analysis for Fault Detection in Software[J]. IEEE Trans on Software Engineering,2006:240-253.
Design and Research of a Small Sorting Manipulator System
GAO Qiang1,WU Zhongyi1,SHAO Changmeng2
( 1.Mechanical engineering institute, Shenyang Institute of Engineering, Shenyang 110168, China;2.Beijing gol Power Co. Ltd, Xilinguole 026000, China )
This paper is based on the needs of enterprise, discuss the sorting manipulator that is used to control of goods is based on the PLC so that achieve the purpose for sorting the different colors of goods. the control of manipulator、diving system and executive mechanism are designed systematically in the paper, make use of 3D software-Auto CAD、UG to be modeling、drawing control circuit diagram、hydraulic chart、compiling PLC program by distributing i/o interface, the main point is the calculation of gripping force of hand and choose hydraulic cylinder, make use of force control software to build model so that simulation operation、verify the feasibility of the program and achieve desired results and try on make the prototype machine.
robot hand;hydraulic;PLC;UG
TP273
A
10.3969/j.issn.1006-0316.2018.05.013
1006-0316 (2018) 05-0048-04
2017-10-24
高强(1986-),男,满族,辽宁葫芦岛人,硕士,工程师,主要研究方向为人工智能。



