吴旭,胡俊雄,2,罗世辉,马卫华
阶跃不平顺下接触刚度对受流质量影响分析
吴旭1,胡俊雄1,2,罗世辉1,马卫华1
(1.西南交通大学 牵引动力国家重点实验室,四川 成都 610031;2.郑州铁路职业技术学院 河南省轨道交通智能安全研究中心,河南 郑州 451460)
接触轨不平顺直接作用于受流器并影响中低速磁浮列车的受流质量。为研究接触轨不平顺及接触刚度对受流器的动力学响应,本文建立了中低速磁浮列车动力学模型与刚柔耦合靴-轨动力学模型,定义离线率、接触力合格率为受流质量的评价指标,通过仿真计算了阶跃不平顺工况下靴轨接触刚度对受流质量的影响。研究表明:离线率随接触刚度的增加而减小,接触力合格率先随接触刚度的增加而增加,后随接触刚度增加而减小。为保证中低速磁浮列车线路运行时的受流质量,靴轨接触刚度应取1×107N/m。
中低速磁浮列车;受流器;靴-轨关系;接触刚度
中低速磁浮列车受流器是安装于悬浮架下方的侧向电能采集装置,通过受流器与铺设在轨道梁侧部的接触轨相互作用获取电能。接触轨包括第三轨和第四轨,接触轨上带有牵引变电所传输的DC 1500 V电压,中低速磁浮列车运行时受流器滑靴在接触轨表面滑动接触获得电能,第四轨用于回收靴-轨系统的杂散电流[1]。中低速磁浮列车受流器的动力学行为受接触轨弯头、列车运行速度、接触力等因素的影响[2]。靴-轨系统工作的稳定性和可靠性直接影响着整车的正常供电,是一个不容忽视的关键子系统。在实际运营中接触轨不平顺严重影响着受流器的受流稳定性,近年来关于受流器与接触轨轨道不平顺研究的重要性受到广大研究人员的重视。
Stewart等[3]根据试验数据及仿真得出受流器接触力随接触轨表面高度的变化而变化,接触轨表面不平顺会导致离线、滑靴表面出现较大的接触力突变;Bucca等[4]建立了受电弓与接触网的磨耗预测模型,分别考虑了无接触网不平顺、低接触网不平顺与高接触网不平顺的工况,得出不平顺程度越高接触网磨耗量越大;杨凡[5]研究了在接触轨轨道高低不平顺、不同车速下受流器的振动响应,得出速度越低、接触轨轨道高低不平顺幅值越小受流器的振动响应越小;李伟[6]提出了通过轨道弯头时地铁下部受流器接触力的计算方法,并提出接触轨的安装误差应保持在±6 mm内;张鹏飞[7]研究了膨胀接头阶跃型不平顺下受流器的通过性,得到前轨高于后轨,幅值为0~1 mm时受流器通过性较好,但没有引入车辆的振动;刘铭[8]通过研究得出全线路接触轨安装误差保持在0~1 mm的正态分布情况下受流器能平稳通过误差区段,但没有引入车辆的振动。
靴-轨系统因接触轨安装误差造成的阶跃型不平顺受到了国内外学者的研究,但在研究时将靴-轨系统考虑为单一的系统,未考虑列车振动下受流器的通过性。受流器安装于中低速磁浮列车上,运行时必然受到列车振动的影响,单独分析受流器对接触轨阶跃误差区段的通过性与实际有较大出入。当不平顺幅值较大时会导致滑靴与接触轨脱离并产生燃弧,从而影响受流器的受流质量,严重时甚至会导致安全事故。
本文研究受流器通过因安装误差导致的接触轨阶跃不平顺的受流质量,定义离线率与接触力合格率为受流质量的判据,在刚柔耦合靴-轨模型中考虑了中低速磁浮列车的横向运行振动,并分析了接触刚度对受流质量的影响。
1 受流器
1.1 受流器结构
中低速磁浮列车没有轮轨系统,由电磁力实现列车的悬浮、短定子直线电机牵引悬浮架于轨道梁上运行,故只能采用靴-轨系统采集牵引变电所的电能。


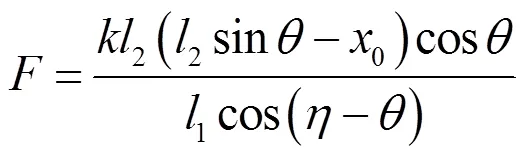
式中:1为上臂杆与连接杆两铰链孔中心距, mm;2为上臂杆铰链孔与拉簧连接点处的距离,mm;为上臂杆转动的角度,(°);为上臂杆与水平面的夹角,(°);为受流器拉簧刚度,N/m;0为拉簧静态接触力下的变形量,mm。
1、l、、、0为受流器结构参数。通过分析可知,当知道任意时刻受流器上臂杆的旋转角度,即可通过式(1)、式(2)求出任意时刻的接触力。
1.2 标准
受流器的受流稳定性严重影响车辆运行品质,国内外已积极开展研究并制定相关标准。国内外采用的靴-轨系统标准,见表1。

1.接触轨;2.滑靴结构;3.连接杆;4.下臂杆;5.弹簧座;6.绝缘子;7.弹簧系统;8.绝缘板;9.底座;10.上臂杆。
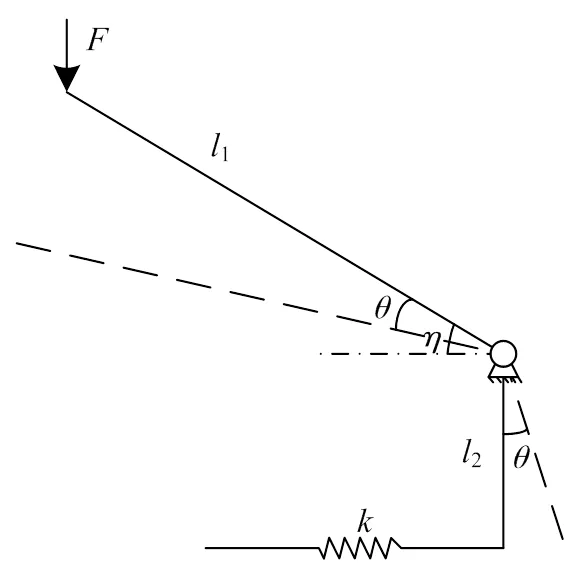
图2 接触力计算示意图

表1 国内外靴-轨系统相应标准
国外发布的标准对靴-轨系统的机电接口作出了规定,但对接触力等参数未做出规定;而国内发布的相应标准集中在地铁受流器上,因中低速磁浮列车地铁受流器受流方式类似,所以在对靴-轨系统分析时可参考地铁受流器的相应标准。
中低速磁浮列车现使用的受流器与接触轨的静态接触力为110±30 N,不同受流器静态接触力略有不同,但都在此范围内。故本文参考GB/T 7928对地铁接触力规定。
2 动力学模型及轨道坡度
本文首先建立中低速磁浮列车动力学模型,包括1个车体、3个悬浮架,总计61个自由度。然后在动力学模型相应悬浮架上标记受流器安装位置、F轨轨道不平顺采用德国高速低干扰谱、以实际中低速磁浮运营线路的运行速度80 km/h进行时域仿真,可得该速度下列车受流器位置的振动加速度。
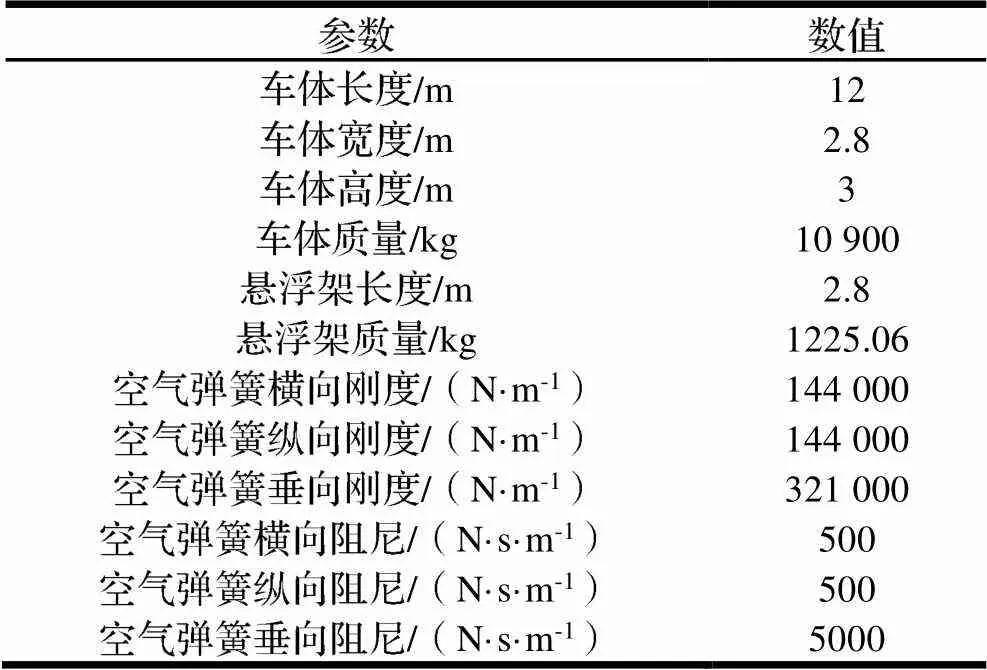
表2 中低速磁浮列车动力学模型部分参数表
在Adams中导入建立的受流器与接触轨模型,通过设置各零件连接关系与材料属性可得靴-轨耦合动力学模型,如图3所示。将得到的受流器振动加速度导入靴-轨耦合动力学模型中,即可得到在车辆振动下磁浮列车受流器动力学模型。
此后,西王布局健康产业的步伐仍未停止。2017年6月18日晚,西王食品公告称,公司同日收到公司控股股东西王集团通知,西王集团于2017年6月16日下午与阿里健康科技(中国)有限公司签署了战略合作签约仪式会议备忘录。
接触轨定长为12 m,靴轨接触时滑靴的动态接触力可等效为移动载荷作用于接触轨,导致接触轨变形,影响受流质量,故分析时考虑柔性接触轨对受流质量的影响。
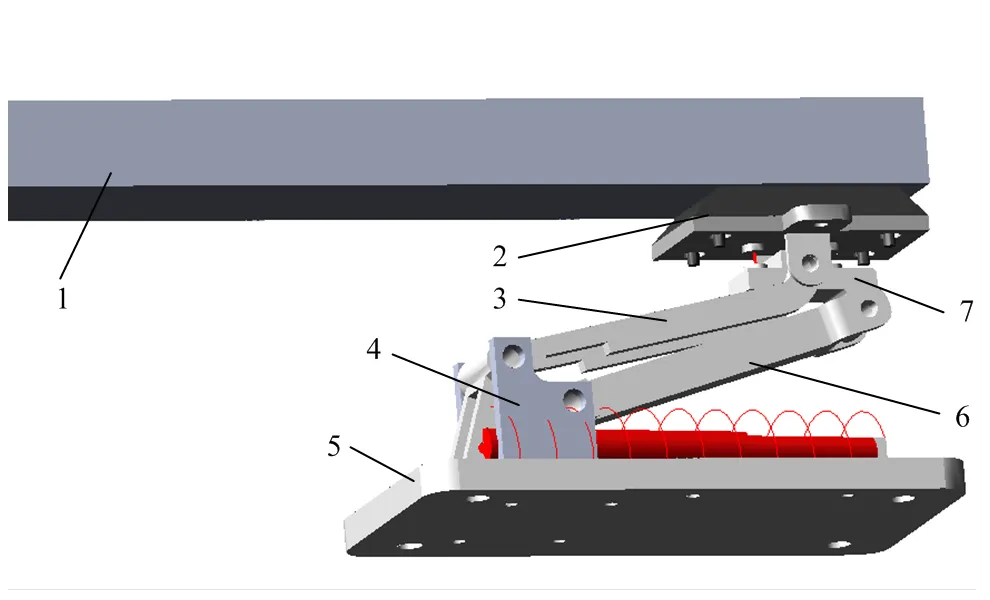
1.接触轨;2.滑靴结构;3.上臂杆;4.底座;5.绝缘板;6.下臂杆;7.连接杆。
由于接触轨定长的因素,列车运行时快时会在很短时间内通过一段供电轨,为仿真列车在阶跃型不平顺值最大时的受流质量,选用一段振动最剧烈的三位悬浮架左侧受流器振动数据导入靴-轨耦合动力学模型,如图4所示。
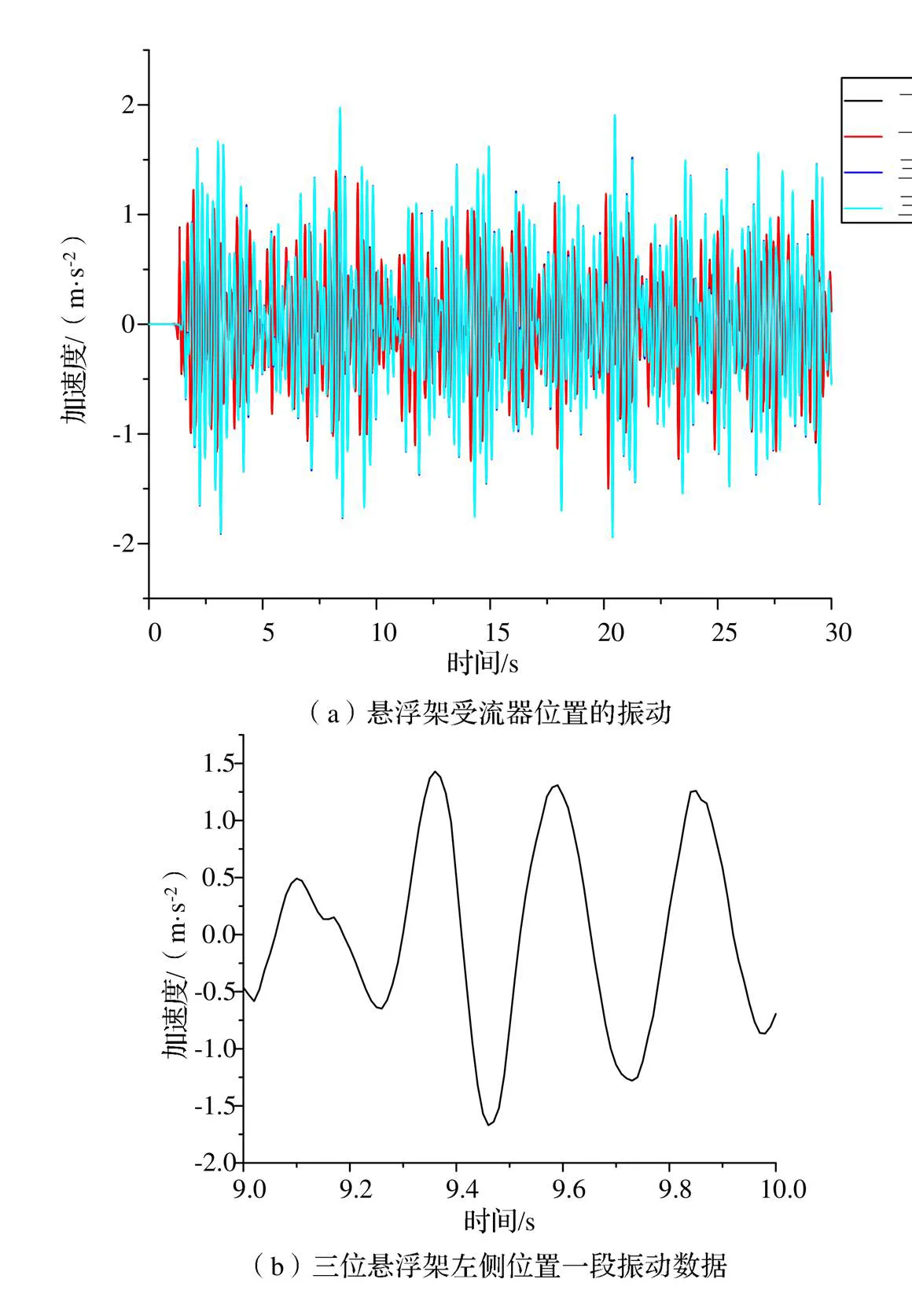
图4 悬浮架受流器的振动
接触轨由人工铺设而成,由于安装精度等问题,相邻两轨会出现轨缝及高差,分别为前轨低于后轨和前轨高于后轨,从而产生阶跃型不平顺。受流器通这些区段时,滑靴在弹簧系统的作用下强制通过轨缝及“上坡”、“下坡”。轨道安装误差导致受流器滑靴出现通过轨缝及过坡现象如图5所示。
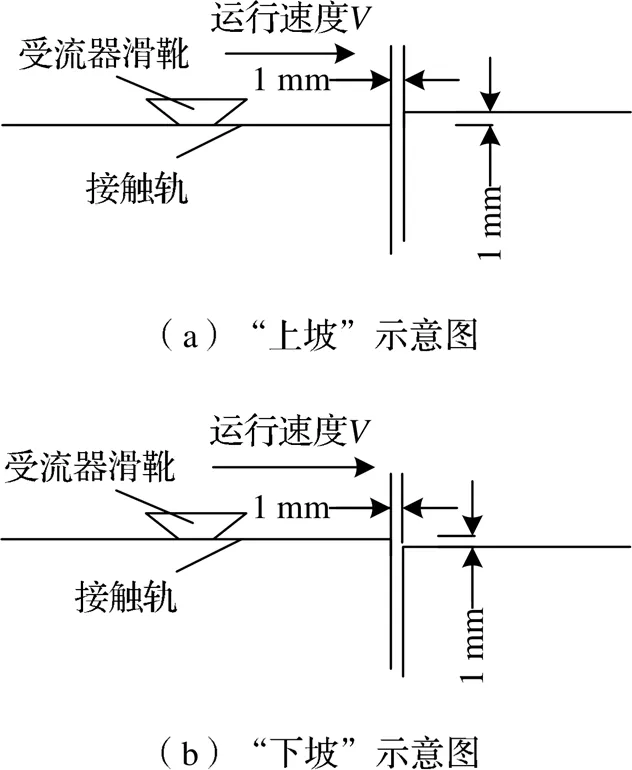
图5 受流器滑靴过坡示意图
3 动力学仿真
因安装误差导致相邻两轨间出现轨缝及高差,影响受流质量,研究认为相应的缝隙及高差一般在0~1 mm[7-8],本文取轨缝和高差都为1 mm的最恶劣工况研究接触刚度对通过轨缝及阶跃不平顺误差区段的影响。
通过研究与仿真可知靴轨接触刚度严重影响受流质量,参考国防科技大学对接触刚度的相关研究[15],本文分析了接触刚度为5×106N/m、1×107N/m、5×107N/m时受流器通过接触轨轨缝及“上坡”和“下坡”阶跃冲击误差区段时的受流质量,以接触力合格率、滑靴离线率为具象化评价指标。
其中接触力合格率定义为动态接触力处于120~180 N的统计数据量与总仿真数据量的比值;滑靴离线率为接触力为0时的统计数据量与总仿真数据量的比值。
3.1 “上坡”阶跃不平顺的受流质量
在接触刚度为5×106N/m、1×107N/m、5×107N/m时,受流器通过接触轨安装误差为1 mm的“上坡”误差区段,得到的振动数据如图6~图8所示。
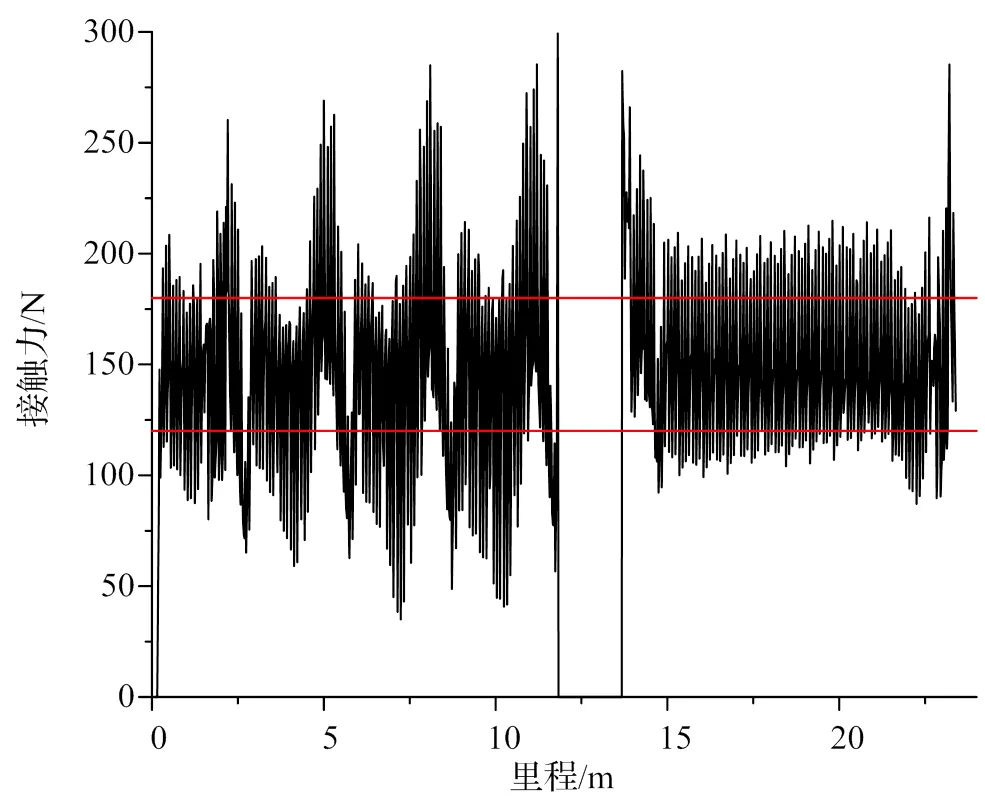
图6 接触刚度为5×106 N/m时通过“上坡”工况
可以看出,在受流器通过“上坡”工况时,由于存在正的阶跃不平顺值,对受流器产生很大的冲击,使滑靴离线。离线前后接触力会产生突变,幅值很大,且通过不平顺区段后接触力波动剧烈,随接触刚度的增加而增大。计算上述三个工况的接触力合格率、滑靴离线率结果如表3所示。
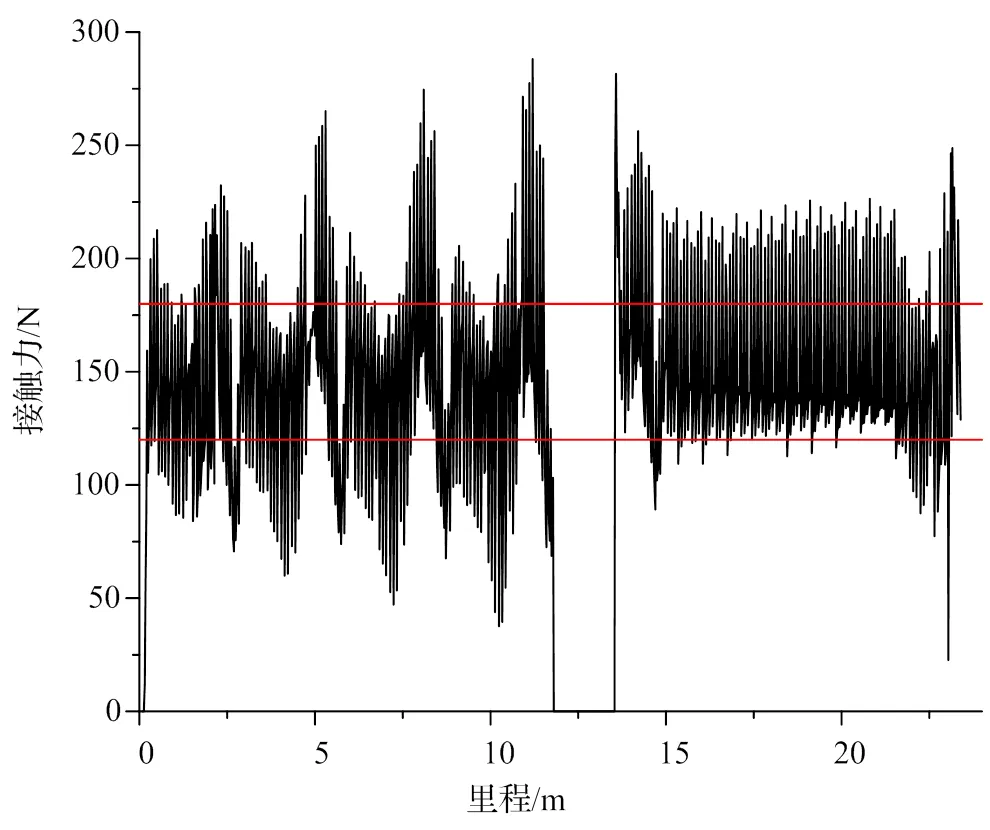
图7 接触刚度为1×107 N/m时通过“上坡”工况
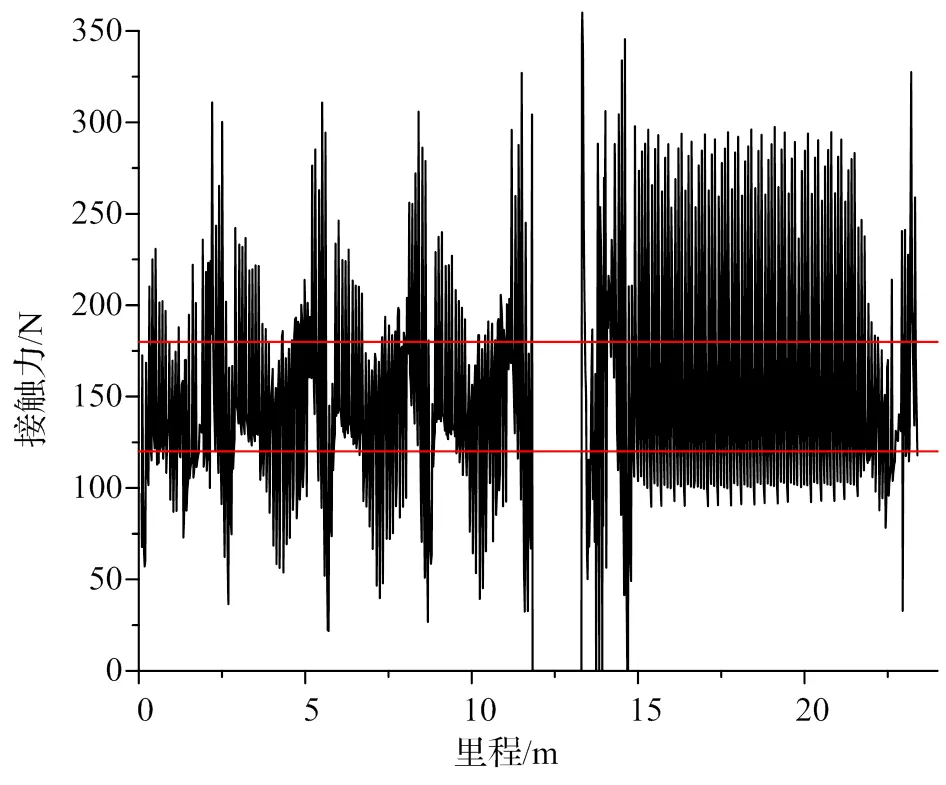
图8 接触刚度为5×107 N/m时通过“上坡”工况

表3 “上坡”工况受流质量
可以看出,滑靴离线率随接触刚度的增加而减小,而接触力合格率先随接触刚度的增加而增大,后随接触刚度的增加而减小。当接触刚度为5×107N/m时滑靴离线率最小,但此时接触力合格率最低,小于50%,即接触力超过一半处在不合理的取值范围;当接触刚度取1×107N/m时,接触力合格率最优,滑靴离线率约为8.2%,离线情况较接触刚度为5×107N/m时差异较小。故为保证受流器在“上坡”型阶跃不平顺的顺利通过性,接触刚度选用1×107N/m时较为合理。
3.2 “下坡”阶跃不平顺的受流质量
在接触刚度为5×106N/m、1×107N/m、5×107N/m时,受流器通过接触轨安装误差为1 mm的“下坡”误差区段,得到的振动数据如图9~图11所示。
可以看出,受流器通过“下坡”工况时,由于存在负的阶跃不平顺值,对受流器产生很大的冲击,使滑靴离线。通过阶跃不平顺区段的离线距离随接触刚度的增加而减小,当接触刚度为5×107N/m时,通过不平顺区段不会产生离线。计算上述三个工况的接触力合格率、滑靴离线率结果如表4所示。
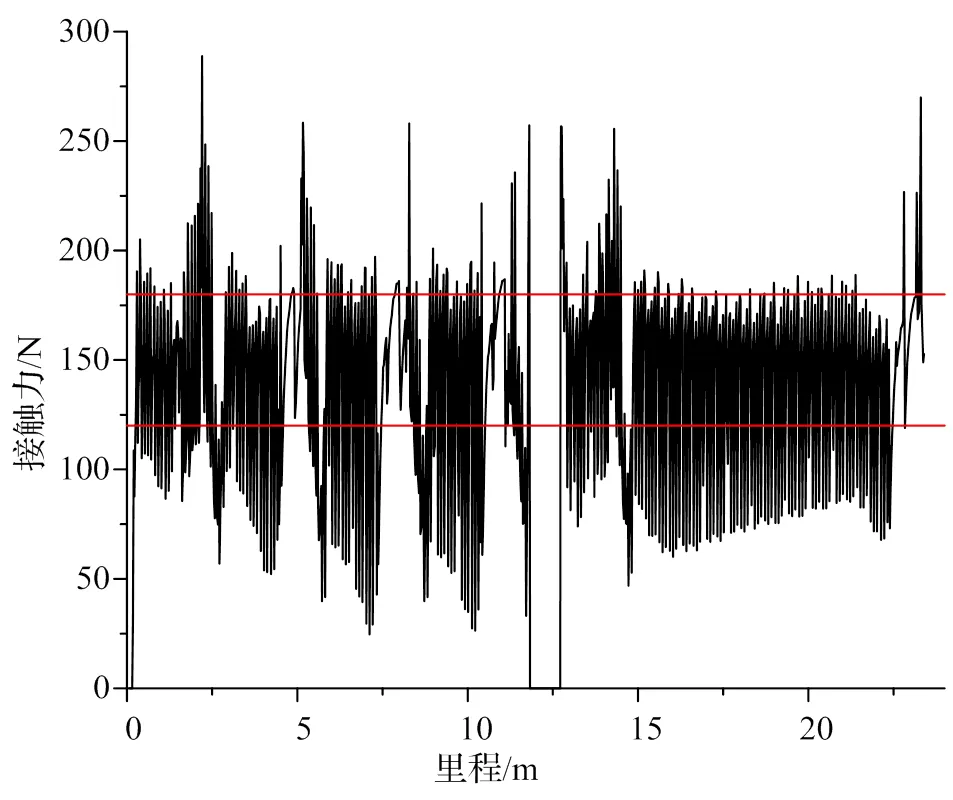
图9 接触刚度为5×106 N/m时通过“下坡”工况
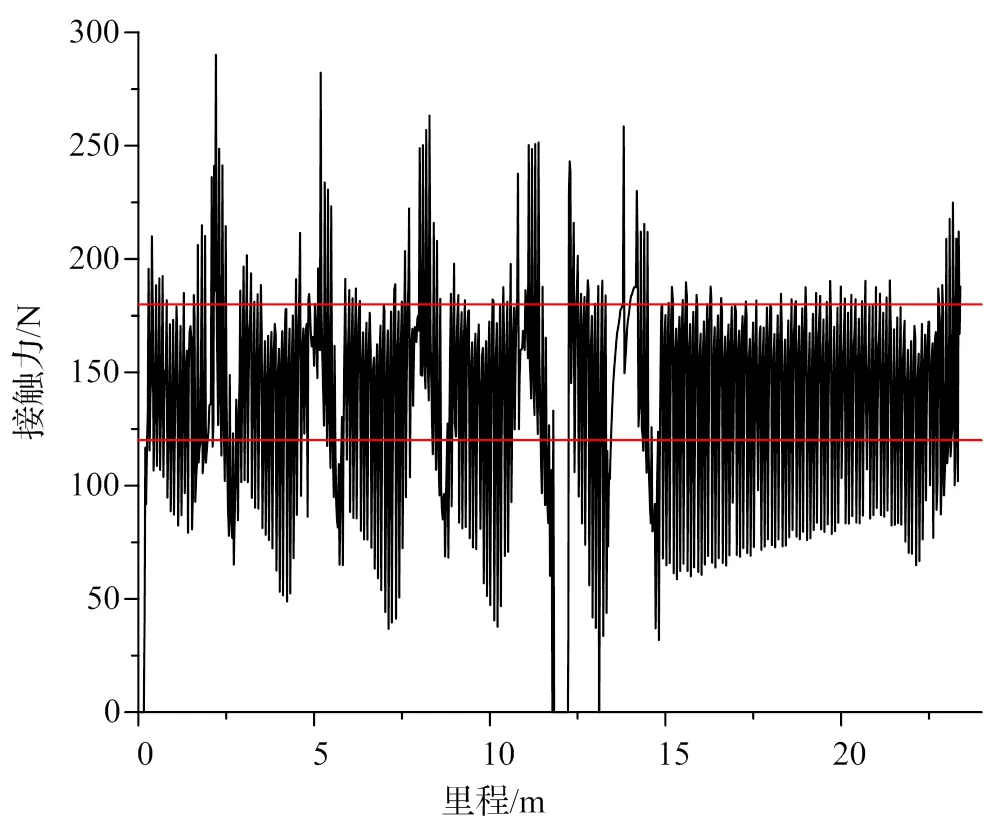
图10 接触刚度为1×107 N/m时通过“下坡”工况
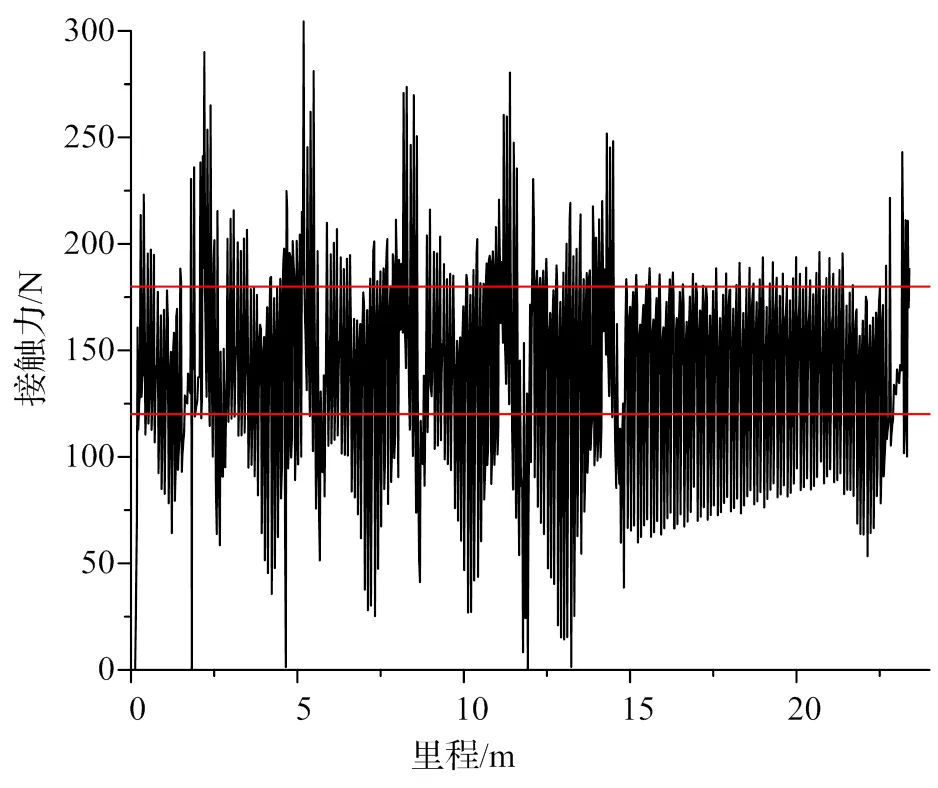
图11 接触刚度为5×107 N/m时通过“下坡”工况
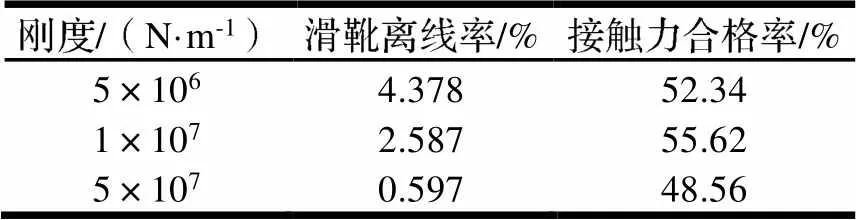
表4 “下坡”工况受流质量
可以看出,滑靴离线率随接触刚度的增加而减小,而接触力合格率先随接触刚度的增加而增大,后随接触刚度的增加而减小。当接触刚度为5×107N/m时滑靴离线率最小,但此时接触力合格率最低,小于50%,即接触力超过一半处在不合理的取值范围;当接触刚度取1×107N/m时,接触力合格率最优,滑靴离线率约2.6%,离线率较低,且与接触刚度为5×107N/m时差异较小。故为保证受流器在“下坡”型阶跃不平顺的顺利通过性,接触刚度选用1×107N/m时较为合理。
4 结语
通过建立中低速磁浮列车动力学模型及刚柔耦合靴-轨耦合模型,研究考虑列车运行振动响应的阶跃不平顺下受流质量受接触刚度的影响,研究得出以下结论:
(1)受流器处于“上坡”型阶跃不平顺时,为保证受流质量,接触刚度应为1×107N/m。
(2)受流器处于“下坡”型阶跃不平顺时为保证受流质量,接触刚度应为1×107N/m。
(3)全线路由于安装误差会出现许多类似的误差区段,为保证受流质量,接触刚度的取值应为1×107N/m。
[1]陈屹. 城市轨道交通四轨供电方式的探讨[J]. 电气化铁道,2010(2):49-50.
[2]肖友庆. 接触轨线路靴轨关系的研究及改善分析[J]. 机电信息,2018(15):69,72.
[3]Stewart E,Weston P,Hillmansen S,et al. Using Bogie-Mounted Sensors to Understand the Dynamics of Third Rail Current Collection Systems. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit,2011,225(2):219-227.
[4]Bucca G,Collina A. Electromechanical interaction between carbon-based pantograph strip and copper contact wire: A heuristic wear model[J]. Tribology International,2015 (92):47-56.
[5]杨凡. 120km/h拉簧式受流器强度及动力学特性研究[D]. 北京:北京交通大学,2017.
[6]李伟. 城轨车辆受流器与三轨的匹配研究与分析[J]. 技术与市场,2016,23(5):48-49.
[7]张鹏飞. 中低速磁浮列车靴轨系统优化[D]. 成都:西南交通大学,2018.
[8]刘铭. 160km/h磁浮列车靴轨系统动力学研究[D]. 成都:西南交通大学,2018.
[9]彭宝林,历洋. 160km/h速度等级磁浮列车受流器研究[J]. 机电信息,2019(11):13-15.
[10]陈明国,周洁,白雪. 中低速磁悬浮列车受流器研制[J]. 机车电传动,2015(5):29-32.
[11]Network Rail. GL/RT 1212. DC Conductor rail energy subsystem and interfaces to rolling stock subsystem[S]. UK:Rail Safety and Standards Board Limited,2015.
[12]Network Rail. GL/RT 2113. Rolling stock subsystem and interfaces to DC conductor rail energy subsystem[S]. UK:Rail Safety and Standards Board Limited,2015.
[13]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会. GB/T 32589轨道交通接触轨受流器[S]. 北京:中国标准出版社,2016.
[14]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会. GB/T 7928地铁车辆通用技术条件[S]. 北京:中国标准出版社,2003.
[15]Xu H P,Liu Y Z,Xie X L,et al. Simulation Study on Dynamic Current Collection Characteristics of the System of Collector Shoe and Conduct Rail of Medium Speed Maglev Train[C]. Chinese Automation Congress,Hangzhou,2019:5485-5490.
Influence of Contact Stiffness on Current Collection Quality under the Condition of Step Irregularity
WU Xu,HU Junxiong,LUO Shihui,MA Weihua
(1.State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu610031, China; 2.Henan Engineering Research Center of Rail Transit Intelligent Security, Zhengzhou Railway Vocational & Technical College, Zhengzhou451460, China)
The contact rail irregularity directly affects the current collector and the current collection quality of medium-low-speed maglev train.In order to study the dynamic response of contact rail irregularity and contact stiffness to current collector,this paper establishes a dynamic model of the medium-low-speed maglev train and a dynamic model of rigid-flexible coupled brake shoe and wheel rail. The off-line rate and contact force qualified rate are defined as the evaluation indexes of current collection quality.The influence of brake shoe and wheel rail contact stiffness on current collection quality under the condition of step irregularity is calculated by simulation. The results show that the off-line rate decreases with the increase of contact stiffness, and the contact force qualified rate first increases with the increase of contact stiffness, and then decreases with the increase of contact stiffness. In order to ensure the current collection quality of medium-low-speed maglev train, the contact stiffness should be 1×107N/m.
medium-low-speed maglev train;collector;brake shoe-wheel rail relationship;contact stiffness
TH113
A
10.3969/j.issn.1006-0316.2021.04.007
1006-0316 (2021) 00-0041-07
2020-09-24
2019河南省轨道交通智能安全工程技术研究中心开放基金(2019KFJJ002)
吴旭(1996-),男,四川资阳人,硕士研究生,主要研究方向为车辆系统动力学,E-mail:wuxuwd@163.com;罗世辉(1964-),男,江西赣州人,博士,教授,主要研究方向为车辆系统动力学。



