丁全利,郭凤艳
(1.通化县农业综合行政执法大队,吉林 通化 134100;2.通化县快大茂镇综合服务中心,吉林 通化 134100)
0 引言
无人机目前主要应用至农业生产(植保飞防与遥感技术)、安防工作(侦查、搜索、追踪等)、创意航拍、巡检、导航及测绘等[1-2]。农用植保无人机在农业生产各项作业环节,在播种、植保、病虫害预防、农作物长势监测及作物产量预测等方面具有众多应用优势,与传统农业相比,无人机具有精准作业、高效环保、操作简单、自动化及智能化程度高等特点,可以显着提升农业生产效率,保障我国粮食安全,加快农业现代化发展[3-5]。
由于植保无人机在我国农业生产中发展时间较短,相关技术及规范体系相对不完善,进而引发了相关植保无人机飞防事故,或者植保无人机飞防效果不佳等现象。因此,分析植保无人机飞防优势及其注意事项,对于推动农用植保无人机技术的发展具有重要意义。
1 植保无人机的定义及发展优势
1.1 定义
植保无人机是指用于农林植物等保护作业工序的无人驾驶飞机,主要通过地面工作人员进行远程遥控对无人机的飞行路线进行规划,进而完成农林植物的病虫害防治、叶面肥喷施等作业[6]。
1.2 分类
1.2.1 按不同飞行平台分
植保无人机按照飞行平台不同可以分为直升机植保无人机、多旋翼植保无人机[7]。
1)直升机植保无人机。主要是通过调整飞机的主桨实现植保无人机的运动,具有统一且稳定的下压风场,在空中具有更强的穿透力,但是结构较为复杂,对操作人员的专业技术水平要求较高,当出现故障时,需要较长的维修周期。
2)多旋翼植保无人机。按照旋翼数量又可以分为四旋翼、六旋翼、八旋翼,甚至十八旋翼等。多旋翼植保无人机是目前应用最为广泛的新型植保无人机,具有操作方便、结构简单、价格相对较为低廉等优势,在进行农业操作时,不需要专门的飞机起降场地,起降较为方便。目前市面上,多旋翼植保无人机还引入了路线规划系统,在进行喷洒作业时,可以避免重喷、漏喷等现象。但是由于飞行平台较小,导致无人机载重质量及续航时间较低,由于存在多个旋翼,在空中飞行过程中会存在多个互相干扰的风场,植保效果较直升机差。
1.2.2 按动力类型不同分
植保无人机按照动力类型的不同可以分为油动无人机及电动无人机,目前,我国主要以电动植保无人机为主。目前主要分为油动直升机植保无人机、电动直升机植保无人机、电动多旋翼植保无人机。
1)油动直升机植保无人机。具有续航时间长、载重大等优势,但是在使用过程中存在机器调试困难、寿命相对较短等特点,其发动机使用寿命仅为300 h左右,机器维护成本较为昂贵,操作人员需要经过专业、严格的技术培训才可以进行操作。目前主要以日本雅马哈为主要生产厂家,在日本使用较为普遍,其使用费用约为1 500元·hm-2,这也是日本水稻价格远高于市场平均价格的主要原因之一[8]。
2)电动直升机植保无人机。是由于油动直升机植保无人机发动机寿命短、维护成本高而逐渐发展起来的新型直升机植保无人机,目前以锂电池作为主要动力来源,虽然电机使用寿命在逐渐提高,但是其续航能力及载重质量都逐渐下降,因此,直升机植保在我国市场中的保有量远低于多旋翼植保无人机的数量。
3)电动多旋翼植保无人机。主要特点为操作简单,性能可靠,是目前市面上的主流机型之一,操作人员经过十天培训就可以熟练操作,但是由于锂电池性能在续航方面较差,因此,需要频繁更换电池保证机器的作业。
1.3 应用优势
1.3.1 提高作业效率
农用植保无人机的作业效率是传统人工作业的60倍以上,且存在自动路线规划系统,可以避免重复作业或者遗漏。随着农业集约化、大型化发展,农业耕地逐渐集中,当几千亩耕地出现病虫害,无法依靠人力进行快速防治,而使用农业植保无人机可以在最短的时间内解决大面积病虫害的问题,提高作业效率,对于实现我国粮食高产稳产具有重要意义。
1.3.2 作业效果良好
植保无人机在进行农业作业时,可以将药物快速喷洒,并且下行气流可以促进雾滴更好地附着在植株叶片及根茎部,提高作业效果。
1.3.3 操作简单
据统计,每年由于人工喷药导致的农药中毒人数约为10万人左右,其中还存在一定比例的死亡人数,传统病虫害防治方式主要依靠人力背负进行喷洒药物,人体处于有毒液体环境中,一旦不注意防护便会出现人员中毒现象。植保无人机操作简单。起降方便,且对操作人员的培训周期短,对人员专业知识要求不高,利用植保无人机进行防治工作,可以保持人员远离作业区域,保证工作人员的身体健康,还可以减少农药残留造成的土壤、水流环境污染等问题。
2 植保无人机的基本结构及系统组成
由于目前植保无人机主要以多旋翼植保无人机为主,因此,针对多旋翼植保无人机的基本结构及组成进行系统阐述与介绍。因此,在下文出现“植保无人机”,默认为“电动多旋翼植保无人机”。多旋翼植保无人机主要由飞行系统、动力系统、链路系统、机身部件等构成。
2.1 飞行系统
飞行系统主要是通过内部高级算法对无人机的飞行姿态、航线规划等进行数据处理与分析,进而通过控制单元实现无人机的平稳飞行。飞行系统主要包括控制单元、IMU(惯性测量单元)、GNSS指南针、执行模块、PMU(电池管理系统)等构成,如图1所示[9]。
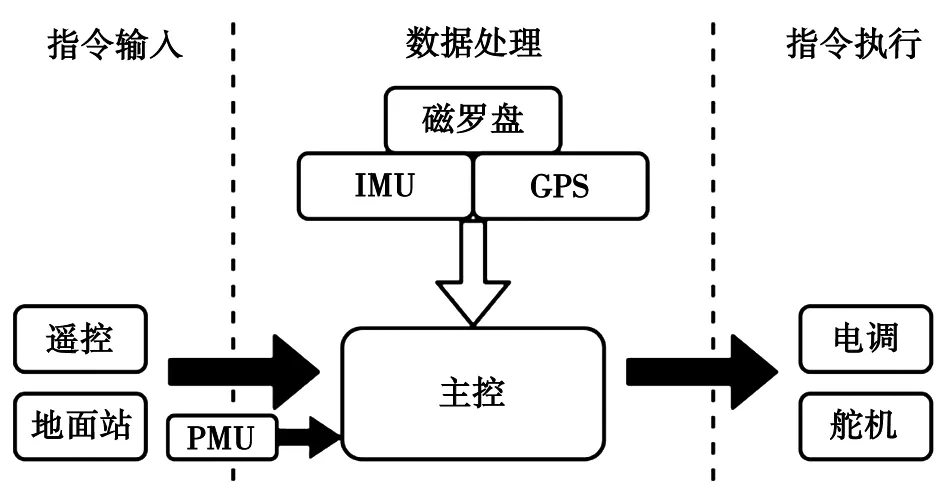
图1 多旋翼植保无人机飞行系统的组成
2.2 动力系统
多旋翼植保无人机的动力系统主要包括电池系统、充电装置、电子调速器、无刷电机、螺旋桨等构成。电池是整体储电系统,为植保无人机的工作提供动力,充电器主要是为电池进行充电,电子调速器属于能量转化装置,将电能转化为机械能保证多旋翼无人机作业;螺旋桨是最终产生升降力的部分,主要结构及组成如图2所示。
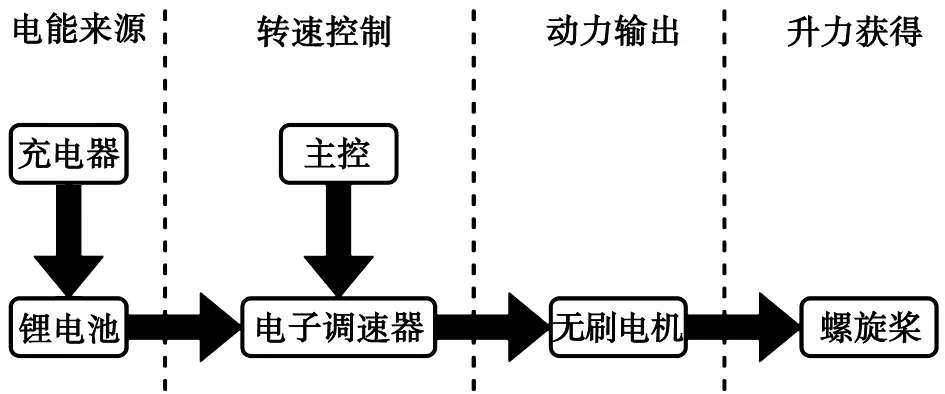
图2 多旋翼植保无人机动力系统组成及作用示意图
2.3 链路系统
链路系统是多旋翼植保无人机的信息传输系统,是无人机与地面操作人员之间沟通的“桥梁”,地面部分属于信号“发射器”,空中部分被称为信号“接收器”,目前还支持视频语音等信息传输功能,一般为3条通信链路,如图3所示。
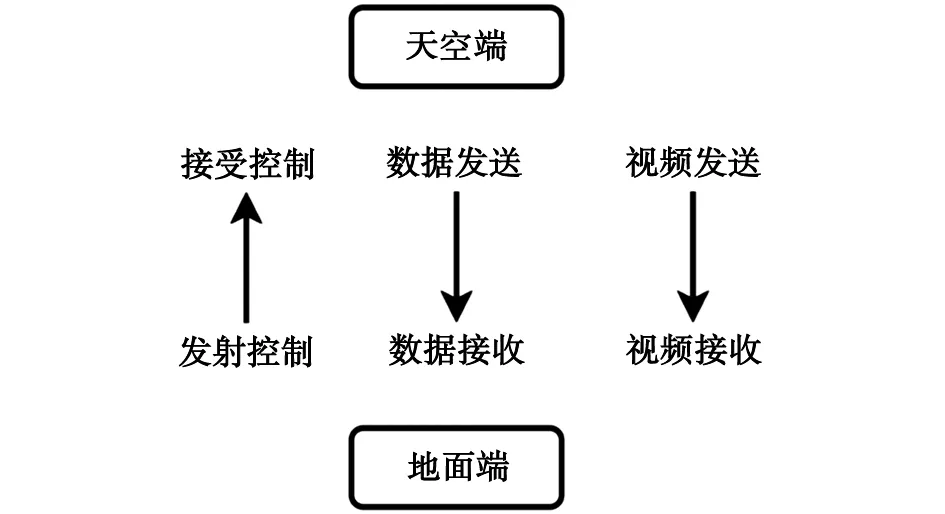
图3 多旋翼植保无人机通信链路
2.4 机身部件
多旋翼植保无人机机身部件又称为“机架”,主要是对相关设备起到支撑功能,主要包括机臂、电机座、主机身及脚架等组成。
3 植保无人机飞防操作规范及注意事项
3.1 植保无人机飞防管理要求
植保无人机飞防要求如表1所示。
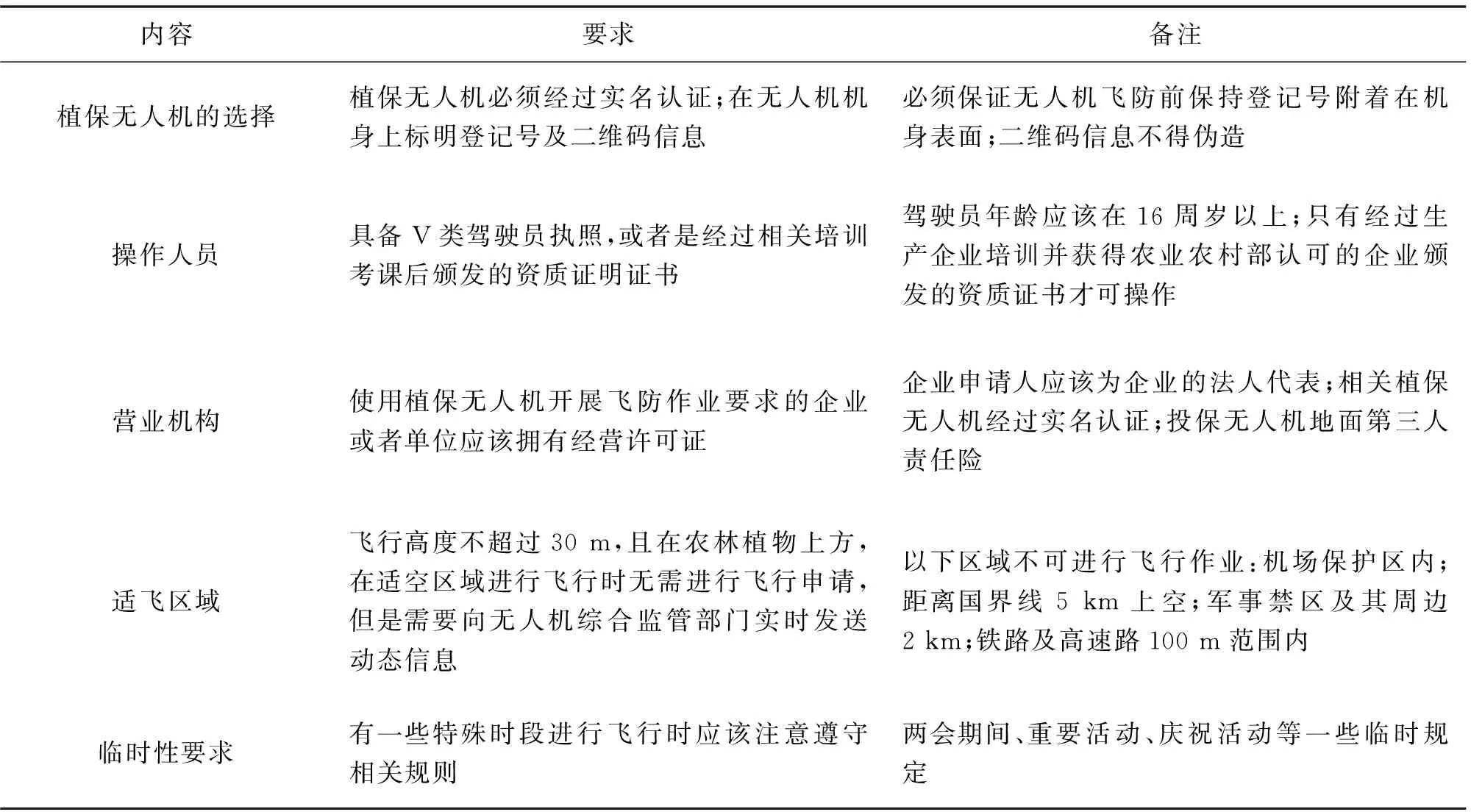
表1 植保无人机飞防管理要求
3.2 植保无人机飞防注意事项
影响植保无人机飞防及作业效率的主要因素包括气候因素、电磁信号因素、地面因素等。在气候因素中,风力是影响植保无人机飞防作业的主要因素,在进行飞防作业前,应明确无人机自身抗风等级,并且保证无人机可以适应飞行环境,在风速较大时,应尽量避免无人机飞至下风向,会导致无人机返回困难或者电量耗尽等问题。大气温度会影响电池的放电性能,从而影响无人机的飞行状态。
应避免在较强磁性的区域飞行,如大量铁栅栏、停车场或带有地下钢筋的建筑区域飞行,如果距离过近,较强的磁场会对植保无人机的磁罗盘产生干扰,同时,应注意与地面建筑物的高度。
由于飞防药剂的稀释比例较小,所以不能选用剧毒或者高度农药,否则会导致中毒现象,常见的农药,如甲拌磷、对硫磷、久效磷等不可做为飞防药剂。
4 结论
农用植保无人机在农业生产各项作业环节,在播种、植保、病虫害预防、农作物长势监测及作物产量预测等方面具有众多应用优势,与传统农业相比,无人机具有精准作业、高效环保、操作简单、自动化及智能化程度高等特点,可以显着提升农业生产效率,保障我国粮食安全,加快农业现代化发展。



