白云涛 佟百岩 李 楠
(吉林嘉德蓝天环境技术有限公司,吉林 吉林 132000)
从20 世纪40 年代,国外就已经出现了应用于棉花、塑料、秸秆等物料压缩和打包处理的装置。近年来,在相关技术的支持下,压缩效果、打包效率得到了进一步地提升,但是在城市生活垃圾处理方面,压缩打包装置的研究与应用相对较少。随着城市生活垃圾的不断增加,以及市民垃圾分类意识的日益提升,压缩打包机的应用前景更加广阔。设计研发一种适合我国中小城市生活垃圾压缩打包处理的装置,对提高垃圾处理效率和实现资源回收利用均有积极意义。
1 垃圾压缩打包机设计要求
经过分拣之后的生活垃圾,从该装置的进料口倒入,在内部完成压实。初始压缩比设置为3:1,可根据垃圾种类进行手动调节压缩比;完成压缩后,得到比较规整的长方体垃圾块,自动进行打包。打包后垃圾块的尺寸为600mm×600mm×450mm,参数同样可手动调整。设计处理能力为(2.5±0.2)t/h,压缩后垃圾块密度不低于360kg/m3。该装置的主要结构包括六部分,分别是进料压实装置、压缩装置、收缩装置、打包系统、液压系统以及机架。
2 垃圾压缩打包机的工艺流程
该装置的功能实现分三步:(1)垃圾预压。在机架的上方设有一处进料斗,呈倒锥形。进料口下方有压缩活塞,当垃圾从进料口倒入,在液压缸的作用下,料斗内侧的活动壁重复做横向的压缩运动,对这部分垃圾完成预压。经过预压处理,垃圾的体积可以减小到1/2,为下一步的二次压缩和打包处理提供了便利条件。(2)垃圾复压。经过初压步骤后,垃圾基本成型,然后掉落到下放的压缩区。压缩活塞推动导轨上的金属板做往复运动。导轨能够减小摩擦,从而提供更大的冲击力,进一步提升了垃圾压缩效果。完成复压后,垃圾体积缩小至原来的1/3 左右。(3)推线与捆线。经过压缩且密度达标后的垃圾块,在压缩活塞的推动下,来到收缩口。在推线机构的帮助下,钢丝分别从上、下板,左、右板上引出,为下一步的捆线做好准备。之后在捆线机构的帮助下,完成对垃圾块的捆扎、打包,并利用剪线组件自动将钢丝剪断。详细流程如图1 所示。
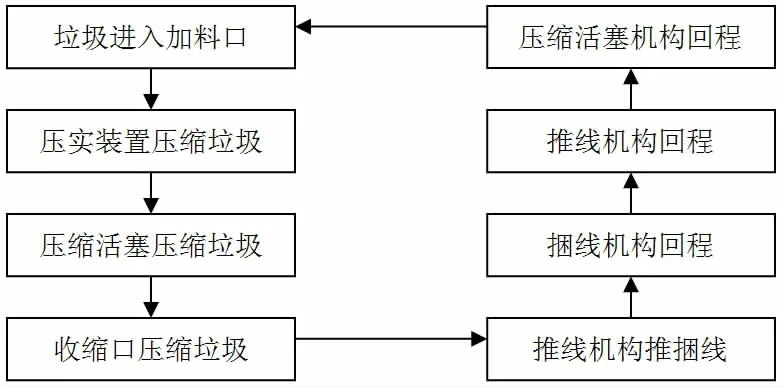
图1 垃圾压缩打包机的运作流程
3 垃圾压缩打包机各部分结构设计
3.1 加料口设计
该结构主要分为上、下两部分,上部是一块平板状的防护罩,垃圾加满之后防护罩自动闭合,一来是防止压缩过程中垃圾受力向上挤出,二来是保证预压效果。下部是存储垃圾的料斗。加料口为“上大下小”型式,下部出料口与压缩腔相连,因此需要保证两者的尺寸一致,设计为800mm×600mm。材料方面,使用6mm 厚的高强度钢板,有助于提高垃圾预压效果。同时,钢板内表面必须做特殊的防腐处理,例如酸洗磷化处理,防止被垃圾液腐蚀,延长使用寿命。在距离上部开口约20cm 处,安装料位检测装置,根据料斗内垃圾余量的多少,自动控制垃圾进给速度。
3.2 压缩活塞设计
作为垃圾压缩的主要装置,压缩活塞通过推动滑轨带动压缩腔内的压缩快,实现对垃圾的压缩。压缩活塞的行程可通过人工手动修改,保证走完一个行程,垃圾刚好达到设计的压缩密度;之后压缩活塞回程、复位,此时经过压缩处理的垃圾进入到打包位置。进一步分析压缩活塞的结构,核心构件是压缩快,材质方面同样采用经过防腐工艺处理后的高强度钢板;此外还有液压缸,是提供压缩动力的主要构件,以及承载上下板和侧板的内部支架。在设计压缩活塞时,除了要考虑结构型式和构件材质外,压缩块的数量、布置方式等,也是设计时要考虑的重点内容。
3.3 机架设计
机架的功能比较简单,发挥着支撑整套装置以及装置内部特定结构的作用。从具体组成上来看,又包含了底座、底板、侧板、上盖板等部分,各部分的作用如下:(1)底座。采用4 条22#槽钢,布置成4500mm×700×20mm 的长方形底座,槽钢相接处采用螺栓连接方式加以固定,方便后期拆卸。(2)底板。采用6mm 厚高强度钢板,平铺在搭设好的底座上,在四周钻孔,将螺栓插入钻孔,使底板与底座槽钢连接、固定。(3)侧板。由于侧板受力较为集中,为提高承载力,除了选用高强钢板外,还要在侧板的外侧焊接加强筋。加强筋沿侧板的对角线布置,在合适位置选择点焊固定。(4)上盖板的尺寸为2400mm×700mm×20mm。参照底板样式,在前半部分的内壁上铣出2 条深5mm、宽80mm、长2000mm 的细长槽,分别布置在内壁的两侧,这样就可以使侧板的上端卡入槽中。
3.4 收缩口设计
该结构有两个功能,其一是将经过活塞压缩后的垃圾块,再进行一遍压缩,提高其密度;其二是调整垃圾块的形状,使其更加规则,为下一步的捆绑创造便利条件。从具体组成上看,主要构件有收缩板、液压缸、上压板、龙门架4 部分,如图1 所示。其中,收缩板、上压板是进一步压缩垃圾块的主要受力构件;龙门架不仅起到了支撑作用,而且为液压缸的推动提供了必要支持,将实现自动、连续的压缩作业。结构组成如图2 所示。
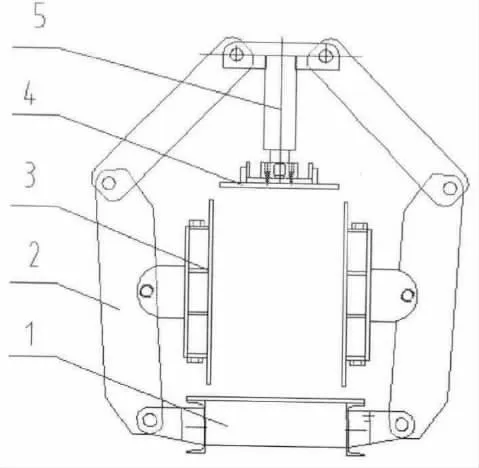
图2 收缩口结构组成
3.5 推线与捆线机构设计
推线部分设计运动流程为:初始状态,推线机构位于装置的左侧,推线杆、推线头等构件固定在金属边框上。启动后,液压缸开始收缩,带动导杆上的滑块从左往右做定向运动。此时,推线头紧贴着垃圾块从一侧至另一侧,推线到位。为了防止推线杆移动过程中,出现摩擦力过大影响推线效果,或者是推线杆移动导致捆线不合理等情况,在设计时增加了两个圆头平键,如图3 所示。
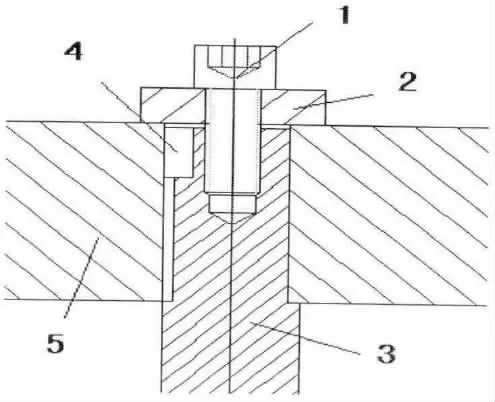
图3 推线杆的固定方式
捆线部分设计运动流程为:电机启动后,带动链轮组、链条做逆时针转动。同时液压缸启动,带动捆线轴、捆线头完成对垃圾块的捆绑。捆绑结束后,利用剪线组件将线头剪断,完成打包。
3.6 液压系统设计
垃圾压缩打包装置中使用到多台液压机,根据功能的不同,在型号与最大负载等方面存在明显差异,如表1 所示。
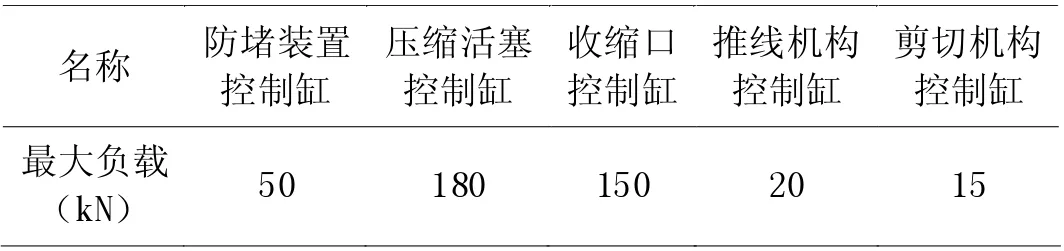
表1 垃圾打包机各部分液压缸的最大负载
除了液压缸外,整个液压系统中还包含了复杂的液压管路、液压泵组、控制阀组等。这些构件在PLC 的控制下,相互协调,共同完成对垃圾的压缩打包。除了考虑硬件组成外,设计时还要关注以下几项参数:其一是调速方式。选择定量泵节流调速,在满足压缩打包处理效率的基础上,还能兼顾速度稳定性;其二是调压方式。液压泵组选择双泵供油回路,相应的选择溢流阀和定压阀,实行双阀调压。其中,溢流阀安装在液压泵出口位置,而定压阀则安装在进/回油开口处;其三是换向回路。利用三位四通电池换向阀,辅助完成换向,实现自动压缩、打包。
4 结论
本文设计的基于PLC 控制的垃圾压缩打包机,主要包括加料机构、收缩机构、推线和捆线机构以及液压系统等。具有操作简便、自动化程度高、压缩打包一体化等特点,为城市生活垃圾的回收处理提供了支持。



