郭李雯 戴怀轩 张泽宇 秦祖昌 何 佳
(河海大学机电工程学院,江苏 常州213001)
对于水面垃圾的清理,现多采用人工打捞或大型综合清污装置,但两者都体积庞大,在狭窄的水域移动不便,成本过高而效率较低;另外,现有技术多只能检测水面垃圾,无法得到立体断面的垃圾污染分布情况。
基于此,笔者设计出一种新型的胸鳍辅助尾鳍运动的水面垃圾清洁机器鱼,利用其在水体中自由游动、沉潜的特点主要解决狭小水域固体垃圾的水面清理问题。
1 研究背景
随着人工智能技术的不断发展和机械制造自动化需求的增长,智能化机器人技术尤其是仿生机器人迅速发展并引起国内外的广泛关注,机器人在水域的应用也更加广泛。鱼类通过身体运动推动周围的水,以此来获得非凡的游动能力,对于涡流的精确控制使得鱼类游动推进效率高、机动性好。模仿鱼类的游动推进模式,研制出高效低噪灵活机动的仿生机器鱼,用以进行水面及水下多种多样复杂作业,已经成为研究人员追求的目标。多数国家所开发出的垃圾清理船,定位于江、河、湖、海等大面积水域的垃圾清理,大多是在传统船舶基础上加设一套垃圾收集装置,船体体积大,排水量大,内燃机驱动,有人驾驶,机动性不佳。采用传统螺旋桨推进器的水下机器人,在螺旋桨旋转推进过程中会产生侧向的涡流,增加能源消耗、降低推进效率且噪声较大[1]。除此之外,多数清洁水面的机器人采用箱体结构,运动范围固定,只能收集水面垃圾。
2 装置分析与优化设计
2.1 流体分析及外壳设计
流线型物体能显着降低流体阻力并广泛应用于机械制造,设计首先提出几种简单的流线型线条设计鱼体,建立三种外形的机器鱼外形在水中的二维截面运动模型进行仿真,模型网格化并通过fluent 采用标准的K-ε 湍流模型对截面在水中进行阻力等比较分析,确定鱼体游动阻力最小的外壳轮廓。
流体分析时假设来流速度为0.5m/s,采用壁面函数法模拟壁面边界的流动情况,速度压力耦合采用SIMPLEC 算法,并且离散格式采用基于单元体的最小二乘法,分析结果如下:
模型1:

图1 模型1 截面图
网格模型为鱼头鱼尾均采用长半轴选取不同值的椭圆模型,曲线方程为:

其中Le(r)为进流段(去流段)长度,即长半轴长度,D 为横截面最大直径。结果如下:

图2 阻力分析结果

图3 水流经机器鱼后的速度云图

图4 速度矢量图
模型2:

图5 模型2 截面图
网格模型为鱼头轮廓采取椭圆方程曲线,鱼尾轮廓为具有一定斜率的直线。
结果如下:

图6 阻力分析结果
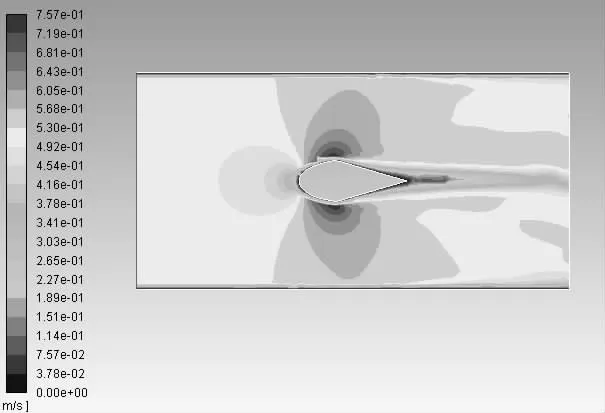
图7 水流经机器鱼后的速度云图

图8 水流速度矢量图
模型3:

图9 模型3 截面图
网格模型为半椭圆加抛物线模型,曲线方程为

其中Le(r)为进流段长度,Lr(r)为去流段长度,D 为横截面最大直径。

图10 阻力分析结果
对比三种模型结果分析:模型3(半椭圆与抛物线组合)的阻力特性最好,模型2(椭圆)其次,模型1(椭圆与直线的组合)最差。对模型3 进行分析可得随着进流长度的增加,总阻力不断减小。

图11 水流经机器鱼后的速度云图

图12 水流速度矢量图
结合上述分析结果,采用半椭圆与抛物线组合的鱼形外壳可以得到流体阻力相对最小的优化装置,提高水面清洁的效率。
2.2 机械装置优化设计
2.2.1 胸鳍设计
胸鳍辅助尾鳍的机器鱼(MFC)可以增加鱼体运动形式的多样性与灵活性。
鱼头设计包括鱼头外壳和底盘,底盘固定在鱼头外壳内部,底盘上固设有四个舵机,相对鱼头呈左右对称,依靠4 个舵机不同时刻的输出规律相互配合控制胸鳍上下翻转、前后摆动的配合可以改变行进方向与鱼体沉潜[2]。胸鳍结构设计如图13 所示。

图13 胸鳍结构设计图
2.2.2 尾鳍设计
尾部连接件包括4 个单元,4 个单元沿着鱼体长度方向依次连接,前三个单元均包括一个舵机和一个U 形固定连接块,舵机的转轴转动连接在固定连接块的开口一端,第一个单元的固定连接块另一端固连在舵盘上以连接鱼头;最后一个单元为尾鳍形硬片;相邻单元之间通过支撑环连接,起支撑与保护作用。将尾鳍三维模型导入matlab 建立与机器人关节类似的相对坐标系,在驱动尾鳍的三个舵机上依次建立坐标系{O}{P}{Q},根据舵机在不同的摆动频率与摆动幅度下得到相同时间间隔三个坐标系原点的位置坐标与坐标系的转动角度作为输入变量,考虑驱动力及水中的阻力及其力矩进行运动方程,得到尾鳍在不同时刻的摆动曲线摆角,将姿态对应的角度写入舵机控制程序。
2.2.3 垃圾收集装置设计
笔者采用螺纹连接可拆卸垃圾收纳网收集水面垃圾,网的大小可根据水域大小调整更换,结构简单;网状结构重量轻而不影响机器鱼的运动,接触面大使垃圾存储量扩大;两伸缩杆分别与鱼体成锐角对称分布在鱼体两侧,减小游动阻力,利用水体流动的反作用力收集垃圾,节约电能。
整体设计简图如图14。
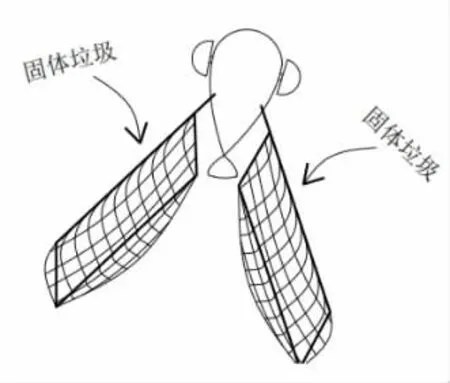
图14 整体设计简图
2.3 运动控制优化设计
目前常用的机器鱼运动控制的嵌入式微处理器主要有单片机、STM32、DSP 等,但随着Arduino 控制应用的发展,我们发现通过Arduino 的普通数字传感器接口产生占空比不同的方波,模拟产生PWM 信号,进行舵机定位;亦或是直接利用Arduino自带的Servo 函数进行舵机的控制更易于编程设计。故选用Arduino UNO 主控板优化设计[4]。
2.4 无线通信设计
无线通信模块可选为成熟的蓝牙无线控制模块[5],抗干扰性能好,主要优点在于其扩频特点。蓝牙板块与Arduino 的控制编程可实现对舵机控制,并且蓝牙模块可直接在电脑、蓝牙主机、手机等带有蓝牙功能的智能终端上操作控制,降低遥控成本,操作方便。在硬件方面采用串口通信,增加了通信的可靠性。蓝牙与手机蓝牙连接,通过波特率设置、按钮编程与手机程序的界面设计得到机器鱼的遥控界面如图15 所示。
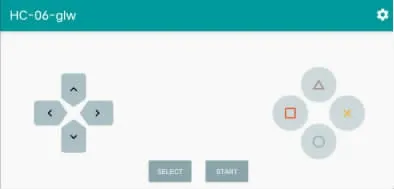
图15 蓝牙遥控界面
3 装置实现
3.1 开发环境
笔者设计制作的水面清洁机器鱼的动力系统均使用LDX-21 型号舵机,扭矩大、承载大(使用两节3.7V 锂电池供电);Arduino UNO 控制板(使用输出为5V 的稳压模块供电)编程使尾部三个舵机转动在不同时刻转动不同转角,实现鱼尾部在垂直于鱼体的左右两个方向出现最大90°的偏角;无线通信模块采用汇承HC-06 蓝牙模块,通过RX,TX 串口实现数据的收发。
3.2 技术实现
在鱼头内部采用4 个舵机控制胸鳍实现机器鱼的运动换向及沉潜,尾部使用3 个舵机实现机器鱼尾部的摆动运动。操控时,操作者根据垃圾收集的位置遥控机器鱼使其到达指定位置。点击手机蓝牙控制界面的START,开始传输串口信号,点击不同的方向键,改变机器鱼的运动方向。鱼头外壳以及胸鳍内部的传动件(除齿轮等精密零件)均采用PLA 塑料材料3D 打印成型。PLA 塑料成本低,硬度好,不影响传动的精度与寿命,胸鳍内部装配及主要运动形式如图16 至图18。

图16 胸鳍调试图

图17 胸鳍“换向”运动

图18 胸鳍“前行”运动

图19 水面清洁机器鱼模型
垃圾收集网式水面清洁机器鱼效果如图19 所示。
结束语
本设计提供的一种水面垃圾清洁机器鱼,利用机器鱼胸鳍辅助尾鳍提高机器鱼运动的高效性与灵活性,利用垃圾收纳网,降低水面垃圾清洁的成本与操作复杂度,利用蓝牙无线通信模块遥控定位,提高垃圾收集的智能化水平,可以有效解决在狭小水域垃圾清洁的问题。机器鱼在水域工作的多样性有待开发,垃圾收集装置的改进是下一步的研究,如气缸吸附、传送带输送等较为复杂机械结构的巧妙运用等设计,以增强垃圾收集的承载力。



