(中国航发湖南动力机械研究所,湖南株洲 412002)
0.引言
磁电式转速传感器(以下简称传感器)作为一种非接触式转速测量传感器,具有结构简单、使用寿命长、测量精度高、输出稳定等特点,被广泛应用于航空发动机中[1]。当传感器输出信号电压幅值过低时,发动机控制系统将无法正确采集到转速信号;过高时,会对发动机控制系统的电子元器件造成损坏,因此需要对其输出性能进行检测,确保输出电压幅值在规定范围内。
可调转速位移试验器(以下简称试验器)是用于模拟发动机的转速信号,对传感器在不同间隙、不同转速下的输出特性进行检测的专用设备。传统的可调转速位移试验器体积庞大、拆卸困难,难以携带。当传感器需要在外场开展环境试验时,由于传统的试验器无法携带,传感器无法在工作态下开展试验,不能满足试验的需求。另外如果传感器在外场使用过程中出现异常现象时,由于缺少试验器,无法在现场对传感器的输出特性进行实时检测,从而不能及时的对传感器的故障进行判别。因此需要研制一套便携式的试验器以满足传感器在不同场合不同环境下的检测需求。
1.磁电式转速传感器工作原理
磁电式转速传感器工作原理为:测速齿轮的励磁齿与传感器导磁体之间有间隙δ(见图1所示),间隙δ的周期性交替变化改变了磁路中的磁阻,引起穿过线圈的磁通量变化,从而在线圈两端感应出周期性感应电势,感应电势的频率与转速正相关。
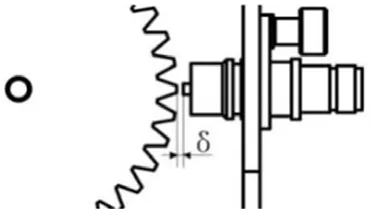
图1 磁电式转速传感器的工作原理
2.传统试验器
传统试验器主要分为2类:一类是通过变频调速器控制电主轴运转,电主轴通过高速联轴器带动齿轮旋转,如图2所示。该类设备通常需要使用水冷装置,同时变频调速器控制容易产生干扰影响传感器的输出特性检测,该类设备通常总重超过200kg,安装拆卸不易难以携带;另一类试验器是通过低速电机带动变速齿轮箱以输出不同范围的转速,如图3所示。齿轮箱采用两级平行轴传动结构,需要水冷装置和喷油润滑,拆装均需进行动平衡,拆卸十分不便。
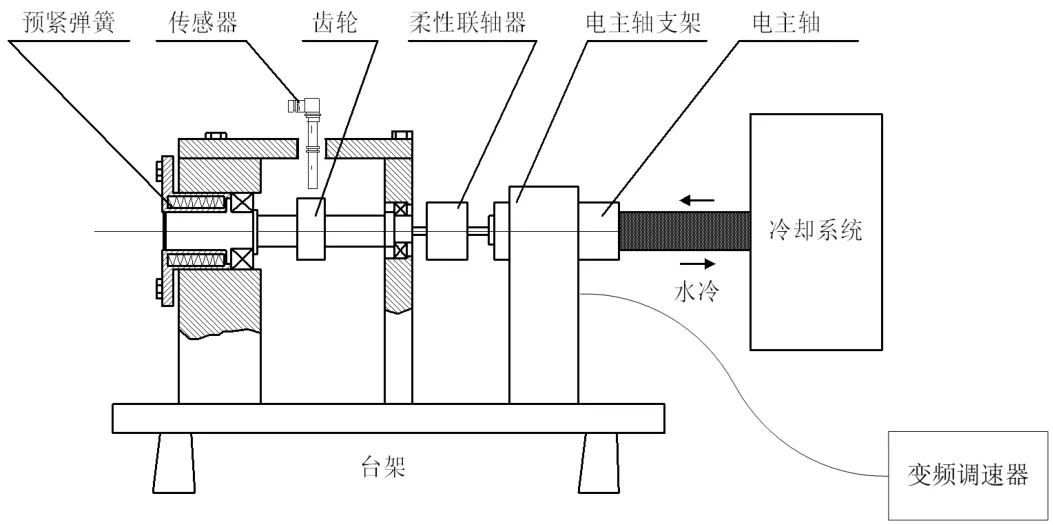
图2 电主轴式转速传感器试验器
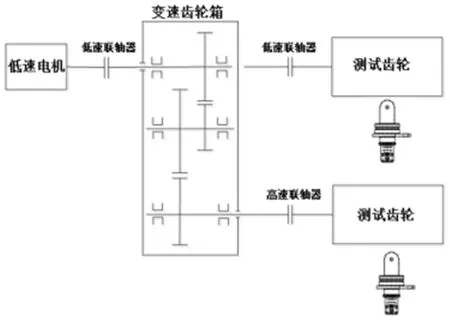
图3 齿轮箱式转速传感器试验器
3.便携式试验器设计
根据传感器的工作原理和其在航空发动机上的实际工作状态,开展了便携式试验器的研制。首先,传感器的测速齿轮尺寸小、重量轻、不带负载,所以对于便携式试验器的电机功率要求不高;其次,传感器的输出特性与传感器的安装方式、齿轮、转速以及传感器与齿轮之间的间隙相关,为了准确模拟传感器在发动机上的工作状态,便携式试验器的齿轮以及传感器的安装方式需与发动机上保持一致,而对于便携式试验器的转速控制和间隙调节有较高的要求。据此设计的便携式试验器如图4所示,主要由机械系统和数字控制系统2个部分组成。
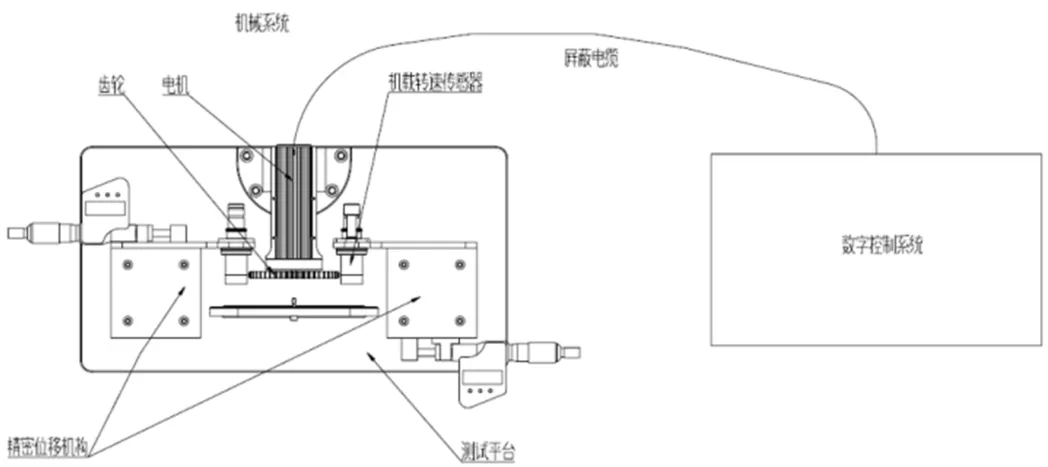
图4 便携式试验器设计图
3.1 机械系统设计
便携式试验器的机械系统主要由齿轮、电机、精密位移机构、测试平台等组成。整体结构采用西门子公司的NX11软件进行设计,如图5所示。便携式试验器能够同时安装两支传感器,间隙调节精度高、体积小巧、拆卸简单、易于携带。

图5 试验器机械设计图
3.1.1 电机设计
采用Maxon公司的EC25高速无刷直流电机代替传统的电主轴,无刷直流电机具有寿命长、转速高、尺寸小巧、电磁干扰低等特点,能够大幅度的减小系统体积、无需水冷装置方便携带,能够满足传感器的检测需求。
3.1.2 精密位移机构设计
精密位移机构是由双自由度的位移机构和高精度数显千分尺组成,通过数显千分尺推动位移机构移动完成间隙的调节,其间隙调节精度高达1μm。同时结构简单拆卸方便,能够满足不同传感器的安装需求。
3.1.3 测试平台设计
测试平台整体结构紧凑稳固,采用有机玻璃作为前保护罩,能够直观的观察到设备的运行状态,减轻了系统的重量。同时在试验器齿轮的径向方向使用不锈钢防护罩,能够有效的防护电机失效时的安全风险,保障操作者的安全。
3.2 数字控制系统设计
数字控制系统的主要作用是驱动电机旋转,在转速范围内实现无级调速,测量转速并显示。数字控制系统主要包括:电机控制模块和测速模块。
3.2.1 电机控制模块
电机控制模块主要由EC25无刷直流电机、伺服控制器ESCON70/10以及转速调节、电机启动/停止组成。由于传感器需要在特定的转速点下进行输出特性检测,对于转速的稳定性和控制精度要求较高,而EC25无刷直流电机自带3个霍尔传感器,3个霍尔传感器彼此之间相差120°,能够准确探测转子的位置,配合Maxon公司的ESCON70/10伺服控制器,采用转速闭环控制,转速控制精度可以达到0.05% Fs。
3.2.2 测速模块设计
测速模块主要的功能是实现转速的测量及显示。目前常用的转速测量方法有周期法、测频法和等精度测频法。其中周期法和测频法的测试精度均与被测信号的频率相关,而等精度测频法能够通过调整闸门时间使其与被测信号同步,从而实现整个测试频段的等精度测量[2]。传感器的输出特性检测中既需要测量低频信号又需测量高频信号,所以等精度测频法更加适用。测速模块的工作原理如图6所示,先将传感器的转速信号经过整形滤波电路转换成方波信号,再与CPU所设置的预置闸门信号一起进入D触发器,当fi的上升沿到来时,所设预置闸门信号的电平直接控制计数器1和计数器2启动和停止。设计数器1对转速信号频率fi进行计数的值为M,计数器2对标准时钟频率f0进行计数的值为N, 则两个计数器在同时启动计数和停止计数所用的时间相等,即:
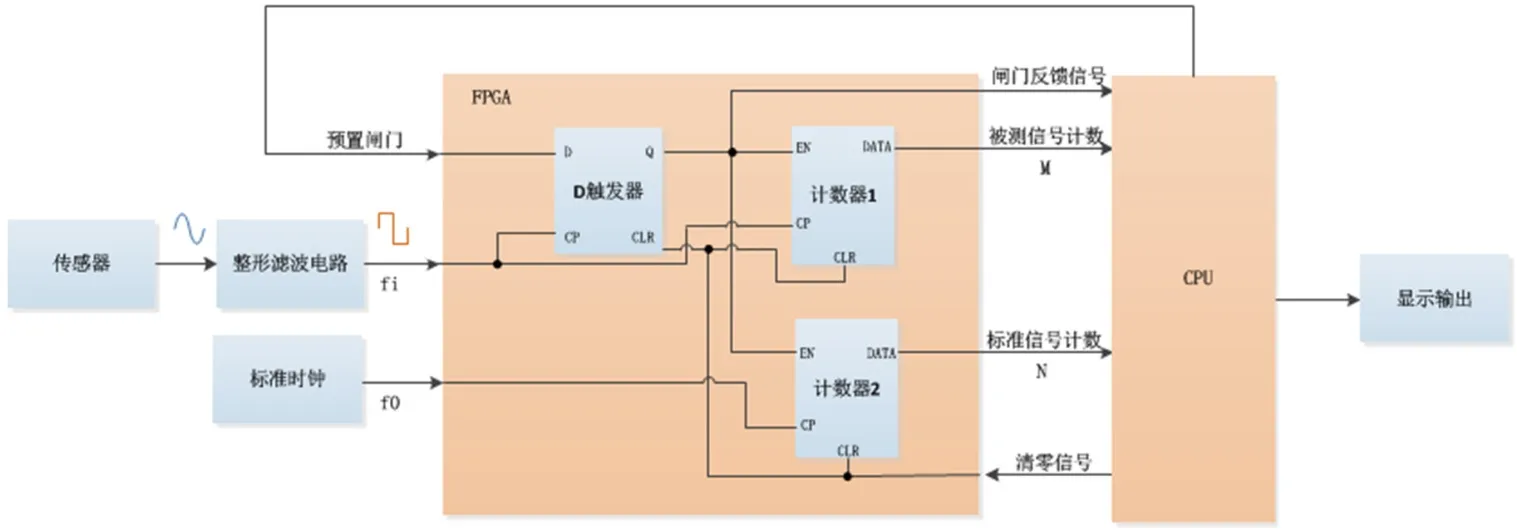
图6 测速模块的工作原理图

转速信号n的公式如下:

用MODELSIM软件对测速模块功能仿真,其结果如图7所示,测量过程中闸门开关能够根据转速信号进行控制调整,使得采集时间为转速信号周期的整数倍,确保了全频段等精度测量,其测量的最大误差只有±1个基准时钟周期,测量精度高。
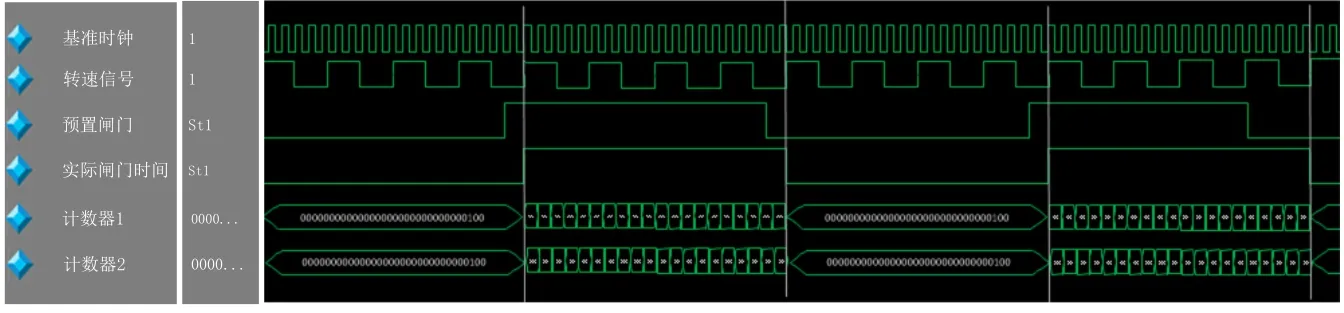
图7 测速模块功能仿真
3.2.3 整体布局设计
为了满足数字控制系统的安装布局,选择合适的机箱,减轻重量,需要对整体布局进行设计。这里采用Altium Designer 20 软件进行电路设计,完成后将三维模型导出,再结合大功率直流电源、伺服控制器、机箱等模型,按照各器件的功能和散热要求进行布局,如图8所示,整体布局设计提高了系统的可视性、维护性,同时也提高了整个系统的空间利用率。
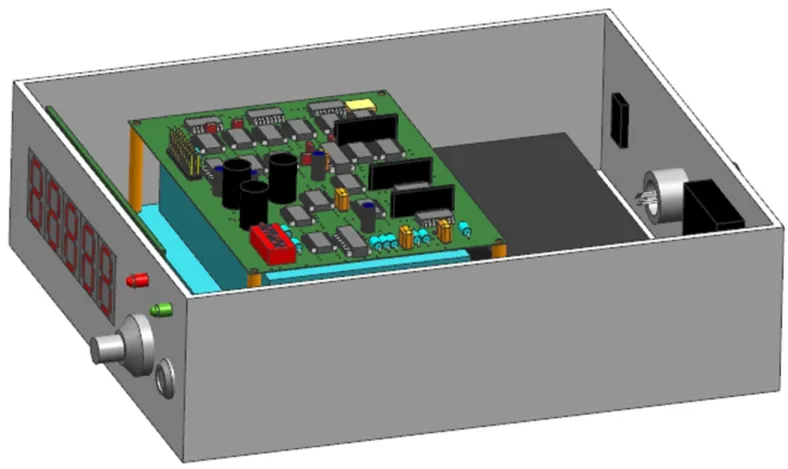
图8 测速模块布局设计
4.应用举例
某型传感器需要在外场进行电磁兼容试验以验证复杂电磁环境对传感器工作状态的影响。本文设计的便携式试验器如图9所示,电磁干扰低、体积小巧、便于携带,将其带至外场与传感器一起进行了电磁兼容试验,确保了试验的顺利完成。

图9 试验器实物图
5.结语
本文设计的试验器具有体积小巧重量轻、精度高、操作简单、易携带等优点。目前已经广泛应用于传感器的输出特性检测和外场试验中,为交付高质量的传感器提供了有效的检测手段。



